S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Step by Step Guide Book On Home WiringDocument50 paginiStep by Step Guide Book On Home WiringquangspktÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- GATE Chemical Engineering 2002Document10 paginiGATE Chemical Engineering 2002rahulsaini855Încă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Flywheel HandoutDocument5 paginiFlywheel Handoutamanuelfitsum589Încă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Petition No. 164/MP/2018 &ors. Page 1 of 48Document48 paginiPetition No. 164/MP/2018 &ors. Page 1 of 48Bhupendra CharanÎncă nu există evaluări
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Turbine Operation and Maintenance ManualDocument31 paginiTurbine Operation and Maintenance ManualTaufik TajudinÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Quantum EfficiencyDocument8 paginiQuantum EfficiencySurender DilipÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Volume-I - (Coal) 2014636129985100886136 PDFDocument153 paginiVolume-I - (Coal) 2014636129985100886136 PDFAzhar KhanÎncă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Envirable: Induction Heater CatalogDocument23 paginiEnvirable: Induction Heater CatalogAamirMalikÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- PowerTHRU BrochureDocument4 paginiPowerTHRU BrochureNesa VijinÎncă nu există evaluări
- H&MT - Lesson 9. Types of Fins, Fin Applications, Heat Transfer Through Fin of Uniform Cross-SectionDocument6 paginiH&MT - Lesson 9. Types of Fins, Fin Applications, Heat Transfer Through Fin of Uniform Cross-SectionadimeghaÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Workshop Manual: TAD1240GE, TAD1241GE/VE TAD1242GE/VE, TWD1240VEDocument104 paginiWorkshop Manual: TAD1240GE, TAD1241GE/VE TAD1242GE/VE, TWD1240VEThong Chan100% (1)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Bulletin 836T Pressure ControlsDocument4 paginiBulletin 836T Pressure ControlsWendy CassidyÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Testing & Commissioning of Chilled Water PumpsDocument3 paginiTesting & Commissioning of Chilled Water Pumpsamg00733% (3)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- uPVC Pressure Pipes CatalogueDocument30 paginiuPVC Pressure Pipes CatalogueanishsrÎncă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Forty Years of Heat Integration: Pinch Analysis (PA) and Mathematical Programming (MP)Document14 paginiForty Years of Heat Integration: Pinch Analysis (PA) and Mathematical Programming (MP)Raviranjan Kumar SinghÎncă nu există evaluări
- Chapter 5.1 Guided ReadingDocument2 paginiChapter 5.1 Guided ReadingEllie HenryÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Field Experience With The Blasch VectorWall Reaction Furnace Checkerwall PTQ Q1 2014Document7 paginiField Experience With The Blasch VectorWall Reaction Furnace Checkerwall PTQ Q1 2014rajachemÎncă nu există evaluări
- BIO301 Mini Project Written ReportDocument33 paginiBIO301 Mini Project Written ReportFahmy AmyÎncă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- LTC4020 - 55V Buck-Boost Multi-Chemistry Battery ChargerDocument42 paginiLTC4020 - 55V Buck-Boost Multi-Chemistry Battery ChargerdevchandarÎncă nu există evaluări
- Zelio Control Relays - RM4UB35Document8 paginiZelio Control Relays - RM4UB35Variya DharmeshÎncă nu există evaluări
- Specification For Fuel Gases For Combustion in Heavy-Duty Gas TurbinesDocument24 paginiSpecification For Fuel Gases For Combustion in Heavy-Duty Gas TurbinesGreg EverettÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- DR - Swapna BhowmikDocument21 paginiDR - Swapna BhowmikAnil Anil ChoudharyÎncă nu există evaluări
- Aalborg OL: The Large Capacity Modular Boiler PlantDocument2 paginiAalborg OL: The Large Capacity Modular Boiler Plantthlim19078656Încă nu există evaluări
- Manual Bomba de GasolinaDocument80 paginiManual Bomba de GasolinaMario Alberto Llanos LópezÎncă nu există evaluări
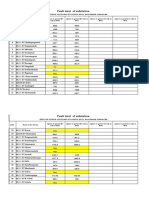
- Fault Level of SubstationDocument2 paginiFault Level of SubstationrtadÎncă nu există evaluări
- Overfill - Valve - 442B Size 4Document3 paginiOverfill - Valve - 442B Size 4j8164322Încă nu există evaluări
- Fluid Mechanics Formulas ShortcutsDocument15 paginiFluid Mechanics Formulas Shortcuts9444583008Încă nu există evaluări
- 39S Be 1977Document41 pagini39S Be 1977Dre KrakÎncă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- SAR Electrical and Electronics Engineering Technology - HCMUTE PDFDocument113 paginiSAR Electrical and Electronics Engineering Technology - HCMUTE PDFTran Anh VuÎncă nu există evaluări
- Pumps Rotary Gear Pump Selection GuideDocument1 paginăPumps Rotary Gear Pump Selection GuidewidhisaputrawijayaÎncă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)