S-ar putea să vă placă și
- Margdarshan 2020 1Document15 paginiMargdarshan 2020 1Vijay PrabhuÎncă nu există evaluări
- BROCHURE21919 2019 09 21 Printed PDFDocument32 paginiBROCHURE21919 2019 09 21 Printed PDFVijay PrabhuÎncă nu există evaluări
- Brochure-24 Jan 2020 National Seminar Grid Connected Inverter - CPRI JKDocument5 paginiBrochure-24 Jan 2020 National Seminar Grid Connected Inverter - CPRI JKVijay PrabhuÎncă nu există evaluări
- Flyer Electric and Hybrid Vehicle Engineering DT 17th Sept 2019 - UpdatedDocument1 paginăFlyer Electric and Hybrid Vehicle Engineering DT 17th Sept 2019 - UpdatedVijay PrabhuÎncă nu există evaluări
- About IIITDM Kancheepuram, Chennai: Key TakeawayDocument1 paginăAbout IIITDM Kancheepuram, Chennai: Key TakeawayVijay PrabhuÎncă nu există evaluări
- Writing A Literature ReviewDocument1 paginăWriting A Literature ReviewVijay PrabhuÎncă nu există evaluări
- Energy Storage For Solar PV BrochureDocument4 paginiEnergy Storage For Solar PV BrochureVijay PrabhuÎncă nu există evaluări
- Course 3 Digital Logic Design - Syllabus For Comprehensive Written ExaminationDocument1 paginăCourse 3 Digital Logic Design - Syllabus For Comprehensive Written ExaminationVijay PrabhuÎncă nu există evaluări
- Speed Control of 3Ø AC Induction Motor Using VSI & MicrocontrollerDocument32 paginiSpeed Control of 3Ø AC Induction Motor Using VSI & MicrocontrollerVijay PrabhuÎncă nu există evaluări
- Discrete Control SystemsDocument4 paginiDiscrete Control SystemsVijay PrabhuÎncă nu există evaluări
- Course 3 Digital Logic Design - Syllabus For Comprehensive Written ExaminationDocument1 paginăCourse 3 Digital Logic Design - Syllabus For Comprehensive Written ExaminationVijay PrabhuÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Final DocumentDocument51 paginiFinal DocumentDhineshÎncă nu există evaluări
- Brilla SpaDocument16 paginiBrilla SpaRaman SainiÎncă nu există evaluări
- WhatsApp Chat With ITS MCA (2019-22) OfficialDocument53 paginiWhatsApp Chat With ITS MCA (2019-22) Officialpushkar kumarÎncă nu există evaluări
- Parking Example - JAVADocument4 paginiParking Example - JAVAMuhammad Rana Farhan100% (1)
- GIS SPDSS FinalDocument11 paginiGIS SPDSS FinalsrverngpÎncă nu există evaluări
- Citrix Xen Desktop Interview Questions and Answers - Citrix Xen Desktop FAQsDocument3 paginiCitrix Xen Desktop Interview Questions and Answers - Citrix Xen Desktop FAQsAnonymous rNmxZViYaÎncă nu există evaluări
- Energy Management and Heat Storage For Solar Adsorption CoolingDocument11 paginiEnergy Management and Heat Storage For Solar Adsorption CoolingRendy Adhi RachmantoÎncă nu există evaluări
- J1587 SIDs - EngineDocument5 paginiJ1587 SIDs - EnginelibertyplusÎncă nu există evaluări
- Electrical Equipment Manual & Methodology Circuit Breaker Contact Resistance TestDocument5 paginiElectrical Equipment Manual & Methodology Circuit Breaker Contact Resistance TestEdmar BataqueÎncă nu există evaluări
- Programming NortelDocument11 paginiProgramming NortelNeelakanteswar AslapuramÎncă nu există evaluări
- OpTransactionHistory02 12 2019Document4 paginiOpTransactionHistory02 12 2019Vijay KumarÎncă nu există evaluări
- Course Outline: ABE 105 - AB Power EngineeringDocument2 paginiCourse Outline: ABE 105 - AB Power EngineeringKaren Joy BabidaÎncă nu există evaluări
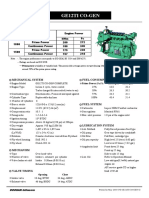
- Ge12ti Co Gen-GDocument2 paginiGe12ti Co Gen-GTilok DasÎncă nu există evaluări
- Chembiooffice Version 14.0: Hardware & Software GuideDocument4 paginiChembiooffice Version 14.0: Hardware & Software GuideSamuel BlakeÎncă nu există evaluări
- Key Responsibility AreasDocument6 paginiKey Responsibility AreasSubodh YadavÎncă nu există evaluări
- Complete Guide Binary Block ExpertsDocument37 paginiComplete Guide Binary Block Expertswisdommensah0406100% (1)
- Traffic Light Detection and Recognition For Self Driving Cars Using Deep Learning SurveyDocument4 paginiTraffic Light Detection and Recognition For Self Driving Cars Using Deep Learning SurveyEditor IJTSRDÎncă nu există evaluări
- Race and Gender in Silicon Valley - SyllabusDocument2 paginiRace and Gender in Silicon Valley - SyllabusCampus ReformÎncă nu există evaluări
- Transistor As An AmplifierDocument3 paginiTransistor As An AmplifierArslan AshfaqÎncă nu există evaluări
- FBS ProfileDocument10 paginiFBS ProfilePrashant VahulrajeÎncă nu există evaluări
- Laptop Sebagai Teman Siswa: Laptop As Students' FriendDocument1 paginăLaptop Sebagai Teman Siswa: Laptop As Students' Friendtigor lianda manik07Încă nu există evaluări
- Network Design CookbookDocument412 paginiNetwork Design Cookbookanon_73609093763% (8)
- Multicast Routing Protocols in Wireless Sensor Networks (WSNS)Document9 paginiMulticast Routing Protocols in Wireless Sensor Networks (WSNS)Journal of Computing100% (1)
- HIO KeypadDocument4 paginiHIO KeypadMaitry ShahÎncă nu există evaluări
- IC Scrum Project Management Gantt Chart Template 10578 Excel 2000 2004Document6 paginiIC Scrum Project Management Gantt Chart Template 10578 Excel 2000 2004Paulo MendesÎncă nu există evaluări
- Applied Information Processing Systems 2022Document588 paginiApplied Information Processing Systems 2022Med KH100% (1)
- Lecture 2.2.4 StringsDocument12 paginiLecture 2.2.4 Stringssiyalohia8Încă nu există evaluări
- 1327 Brochure LPKF Protomats S Series enDocument8 pagini1327 Brochure LPKF Protomats S Series enAlexÎncă nu există evaluări
- Hp81110a ImpulsatoreDocument132 paginiHp81110a Impulsatorejack11rossiÎncă nu există evaluări
- InstallDocument6 paginiInstallDebangshu KumarÎncă nu există evaluări