S-ar putea să vă placă și
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Vacuum Tubes and Semiconductor Theory: Prepared By: Villanueva, Carmelo RDocument83 paginiVacuum Tubes and Semiconductor Theory: Prepared By: Villanueva, Carmelo RReynald John PastranaÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Transmission LinesDocument114 paginiTransmission LinesRad Sison LagoÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Telephony Part 1 RevDocument90 paginiTelephony Part 1 RevReynald John PastranaÎncă nu există evaluări
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Telephony Part 3 RevDocument125 paginiTelephony Part 3 RevReynald John PastranaÎncă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Telephony Part 2 RevDocument74 paginiTelephony Part 2 RevReynald John PastranaÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Voip, Msan and NGNDocument30 paginiVoip, Msan and NGNReynald John PastranaÎncă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Virtual Private NetworkDocument13 paginiVirtual Private NetworkReynald John PastranaÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
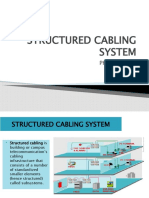
- Structured Cabling SystemDocument9 paginiStructured Cabling SystemReynald John PastranaÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Satellite Communications Edge Final DraftDocument224 paginiSatellite Communications Edge Final DraftJessa Mae Mauricio CastilloÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Radio Wave Propagation3Document39 paginiRadio Wave Propagation3Kenth Salcedo SallegueÎncă nu există evaluări
- Satellite Communications Part 4Document89 paginiSatellite Communications Part 4Reynald John PastranaÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- ROBOTICSDocument107 paginiROBOTICSReynald John PastranaÎncă nu există evaluări
- SDH vs. Sonet: Phil LomboyDocument30 paginiSDH vs. Sonet: Phil LomboyReynald John PastranaÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Radio Wave Propagation1Document21 paginiRadio Wave Propagation1Reynald John PastranaÎncă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Microwave Systems Part2Document107 paginiMicrowave Systems Part2KenÎncă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Radio Wave Propagation2Document34 paginiRadio Wave Propagation2Kenth Salcedo SallegueÎncă nu există evaluări
- Optical FiberFinal21Document126 paginiOptical FiberFinal21Albert AlemaniaÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Navigational AidsDocument171 paginiNavigational AidsReynald John PastranaÎncă nu există evaluări
- Microwave Systems Part1Document100 paginiMicrowave Systems Part1Charlaine Bufi Pancho100% (1)
- Pon and FTTXDocument14 paginiPon and FTTXReynald John PastranaÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Navigational AidsDocument151 paginiNavigational Aidsjimmyboyjr100% (1)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Microwave Systems Part2Document107 paginiMicrowave Systems Part2KenÎncă nu există evaluări
- ModulationDocument170 paginiModulationKen0% (1)
- Microwave Systems Part2Document107 paginiMicrowave Systems Part2KenÎncă nu există evaluări
- MICRO ElectronicsDocument148 paginiMICRO ElectronicsReynald John PastranaÎncă nu există evaluări
- ISDNDocument9 paginiISDNReynald John PastranaÎncă nu există evaluări
- Microwave Systems Part1Document100 paginiMicrowave Systems Part1Charlaine Bufi Pancho100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Microwave Systems Part1Document100 paginiMicrowave Systems Part1Charlaine Bufi Pancho100% (1)
- MEDICAL and BIO-ELECTRONICSDocument34 paginiMEDICAL and BIO-ELECTRONICSReynald John PastranaÎncă nu există evaluări
- Ip PBX and Unified Communications SystemDocument13 paginiIp PBX and Unified Communications SystemReynald John PastranaÎncă nu există evaluări
- Describe an English lesson you enjoyed.: 多叔逻辑口语,中国雅思口语第一品牌 公共微信: ddielts 新浪微博@雅思钱多多Document7 paginiDescribe an English lesson you enjoyed.: 多叔逻辑口语,中国雅思口语第一品牌 公共微信: ddielts 新浪微博@雅思钱多多Siyeon YeungÎncă nu există evaluări
- Excel Crash Course PDFDocument2 paginiExcel Crash Course PDFmanoj_yadav735Încă nu există evaluări
- Libro INGLÉS BÁSICO IDocument85 paginiLibro INGLÉS BÁSICO IRandalHoyos100% (1)
- 240-56062705 RTV Silicone Rubber Insulator Coating and Shed Extender Supplier StandardDocument10 pagini240-56062705 RTV Silicone Rubber Insulator Coating and Shed Extender Supplier StandardJane ChatsiriphatthanaÎncă nu există evaluări
- 22-28 August 2009Document16 pagini22-28 August 2009pratidinÎncă nu există evaluări
- Demonstration of Preprocessing On Dataset Student - Arff Aim: This Experiment Illustrates Some of The Basic Data Preprocessing Operations That Can BeDocument4 paginiDemonstration of Preprocessing On Dataset Student - Arff Aim: This Experiment Illustrates Some of The Basic Data Preprocessing Operations That Can BePavan Sankar KÎncă nu există evaluări
- AIF User Guide PDFDocument631 paginiAIF User Guide PDFÖzgün Alkın ŞensoyÎncă nu există evaluări
- ADAMS/View Function Builder: Run-Time FunctionsDocument185 paginiADAMS/View Function Builder: Run-Time FunctionsSrinivasarao YenigallaÎncă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Retirement 01Document2 paginiRetirement 01Nonema Casera JuarezÎncă nu există evaluări
- All Papers of Thermodyanmics and Heat TransferDocument19 paginiAll Papers of Thermodyanmics and Heat TransfervismayluhadiyaÎncă nu există evaluări
- A12 CanSat Technlology Forclimate Monitoring PDFDocument10 paginiA12 CanSat Technlology Forclimate Monitoring PDFDany PABON VILLAMIZARÎncă nu există evaluări
- EVSDocument3 paginiEVSSuyash AgrawalÎncă nu există evaluări
- Integration Plan Grade 9 Mapeh SeptemberDocument3 paginiIntegration Plan Grade 9 Mapeh Septemberbernie evaristo bacsaÎncă nu există evaluări
- SKF CMSS2200 PDFDocument2 paginiSKF CMSS2200 PDFSANTIAGOÎncă nu există evaluări
- Tensile Strength of Ferro Cement With Respect To Specific SurfaceDocument3 paginiTensile Strength of Ferro Cement With Respect To Specific SurfaceheminÎncă nu există evaluări
- Ahmed Amr P2Document8 paginiAhmed Amr P2Ahmed AmrÎncă nu există evaluări
- Gauss' Law: F A FADocument14 paginiGauss' Law: F A FAValentina DuarteÎncă nu există evaluări
- 3.1 MuazuDocument8 pagini3.1 MuazuMon CastrÎncă nu există evaluări
- History Homework Help Ks3Document8 paginiHistory Homework Help Ks3afetnjvog100% (1)
- Teaching Mathematics Content Through Explicit TeachingDocument39 paginiTeaching Mathematics Content Through Explicit Teachingronna drio100% (1)
- In Search of Begum Akhtar PDFDocument42 paginiIn Search of Begum Akhtar PDFsreyas1273Încă nu există evaluări
- Classroom Debate Rubric Criteria 5 Points 4 Points 3 Points 2 Points 1 Point Total PointsDocument1 paginăClassroom Debate Rubric Criteria 5 Points 4 Points 3 Points 2 Points 1 Point Total PointsKael PenalesÎncă nu există evaluări
- Stevenson Chapter 13Document52 paginiStevenson Chapter 13TanimÎncă nu există evaluări
- Agenda - Meeting SLC (LT) - 27.06.2014 PDFDocument27 paginiAgenda - Meeting SLC (LT) - 27.06.2014 PDFharshal1223Încă nu există evaluări
- Question BankDocument3 paginiQuestion BankHimanshu SharmaÎncă nu există evaluări
- Aerated Concrete Production Using Various Raw MaterialsDocument5 paginiAerated Concrete Production Using Various Raw Materialskinley dorjee100% (1)
- Social Science PedagogyDocument4 paginiSocial Science PedagogyrajendraÎncă nu există evaluări
- TIB Bwpluginrestjson 2.1.0 ReadmeDocument2 paginiTIB Bwpluginrestjson 2.1.0 ReadmemarcmariehenriÎncă nu există evaluări
- Dynamic Shear Modulus SoilDocument14 paginiDynamic Shear Modulus SoilMohamed A. El-BadawiÎncă nu există evaluări
- Climatol GuideDocument40 paginiClimatol GuideFressiaÎncă nu există evaluări