S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
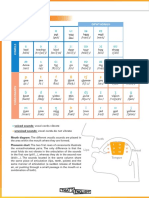
- Present ContinuousDocument5 paginiPresent ContinuousFabián MoralesÎncă nu există evaluări
- 188048-Inglés B2 Comprensión Escrita SolucionesDocument2 pagini188048-Inglés B2 Comprensión Escrita SolucionesTemayÎncă nu există evaluări
- Rubyscript2Exe - A Ruby CompilerDocument19 paginiRubyscript2Exe - A Ruby Compilera4agarwalÎncă nu există evaluări
- PronunciationGuide C1.2Document5 paginiPronunciationGuide C1.2Mihály AleÎncă nu există evaluări
- Understanding the Poetics of Architecture Through Symbols and RhythmDocument23 paginiUnderstanding the Poetics of Architecture Through Symbols and Rhythmming34100% (1)
- Sahlins - Goodbye To Triste TropesDocument25 paginiSahlins - Goodbye To Triste TropeskerimÎncă nu există evaluări
- Detailed Lesson Plan (DLP) Format: Instructional Planning (Iplan)Document15 paginiDetailed Lesson Plan (DLP) Format: Instructional Planning (Iplan)Faith Castillo-EchavezÎncă nu există evaluări
- PEREIRA 2017. Encontros Com As Imagens Medievais PDFDocument278 paginiPEREIRA 2017. Encontros Com As Imagens Medievais PDFVitor GuimaraesÎncă nu există evaluări
- Application LetterDocument12 paginiApplication Letterdiska aisyiffaÎncă nu există evaluări
- WR121 Fall 2019 Argument Writing and Critical InquiryDocument7 paginiWR121 Fall 2019 Argument Writing and Critical InquiryRadka PrasetyoÎncă nu există evaluări
- Blueprint For Ell Success 2Document5 paginiBlueprint For Ell Success 2lychiemarliaÎncă nu există evaluări
- 40 Rohani Ilaj PDFDocument12 pagini40 Rohani Ilaj PDFMuhammad TalhaÎncă nu există evaluări
- Business Intelligence Suite Enterprise Edition Release NotesDocument112 paginiBusiness Intelligence Suite Enterprise Edition Release NotesMadasamy MurugaboobathiÎncă nu există evaluări
- The Black Cat Research PaperDocument7 paginiThe Black Cat Research Papergz8pjezcÎncă nu există evaluări
- ArabicDocument113 paginiArabicLenniMariana100% (12)
- Exercices PreteritDocument3 paginiExercices Preteritkhayrou 692Încă nu există evaluări
- Podcast Script - Grade 12 Ma. April L. Gueta Creative Nonfiction Quarter 2-Module 1 Second Quarter, SY 2021-2022Document2 paginiPodcast Script - Grade 12 Ma. April L. Gueta Creative Nonfiction Quarter 2-Module 1 Second Quarter, SY 2021-2022LillienneÎncă nu există evaluări
- Bradys of Kill FINAL Proof 1 LOWDocument116 paginiBradys of Kill FINAL Proof 1 LOWCaomhan ConnollyÎncă nu există evaluări
- Il Settimo CasoDocument28 paginiIl Settimo CasoLetizia DelnevoÎncă nu există evaluări
- Grammar Lessons - Aleph With BethDocument106 paginiGrammar Lessons - Aleph With BethDeShaunÎncă nu există evaluări
- Quranic DictionaryDocument3 paginiQuranic DictionaryIrshad Ul HaqÎncă nu există evaluări
- How to Write a Précis, Abstract, and OutlineDocument7 paginiHow to Write a Précis, Abstract, and OutlineZaira Marey SorianoÎncă nu există evaluări
- Level 2Document5 paginiLevel 2Agil SalimÎncă nu există evaluări
- Amanda Landa Mechanized Bodies of AdolescenceDocument18 paginiAmanda Landa Mechanized Bodies of Adolescenceleroi77Încă nu există evaluări
- NZ Population Projections 1950-2050Document3 paginiNZ Population Projections 1950-2050Tí CậnÎncă nu există evaluări
- Luo - Plo3 - Edte606 Language Pedagogy Mastery AssignmentDocument26 paginiLuo - Plo3 - Edte606 Language Pedagogy Mastery Assignmentapi-549590947Încă nu există evaluări
- Time Table for Spring 2022 Semester 2Document15 paginiTime Table for Spring 2022 Semester 2fati sultanÎncă nu există evaluări
- Te Ch05-UnlockedDocument33 paginiTe Ch05-UnlockedAbdelrahmanÎncă nu există evaluări
- Designing A CLIL Unit © Isabel Pérez Torres: - de - Bloom - PDF 985846Document2 paginiDesigning A CLIL Unit © Isabel Pérez Torres: - de - Bloom - PDF 985846angelaÎncă nu există evaluări
- Perspectives of New Music Perspectives of New MusicDocument41 paginiPerspectives of New Music Perspectives of New MusicIggÎncă nu există evaluări