S-ar putea să vă placă și
- Trabajo de SismoDocument42 paginiTrabajo de SismoRutico Jacinto Periche FiestasÎncă nu există evaluări
- Ejercicio Sistemas de Partículas - Lagrange - Segundo Parcial - Resuelto PDFDocument2 paginiEjercicio Sistemas de Partículas - Lagrange - Segundo Parcial - Resuelto PDFJoaco CedresÎncă nu există evaluări
- José Beltrán - IBQDocument4 paginiJosé Beltrán - IBQbeltranojeda3aÎncă nu există evaluări
- Sesiones 36 y 37:: Análisis Vectorial y Tensorial Aplicado A La FísicaDocument13 paginiSesiones 36 y 37:: Análisis Vectorial y Tensorial Aplicado A La FísicaLev LandauÎncă nu există evaluări
- Formulario ParcialDocument2 paginiFormulario ParcialERICK ANDRES DARDON GONZALEZÎncă nu există evaluări
- Dinamica S7Document18 paginiDinamica S7andresi231Încă nu există evaluări
- Formulario ElectricidadDocument2 paginiFormulario ElectricidadJonathan loachaminÎncă nu există evaluări
- Problemario T2Document12 paginiProblemario T2Josue LimaÎncă nu există evaluări
- Grupo 6 Lab02 Sist Control II PenduloDocument12 paginiGrupo 6 Lab02 Sist Control II PenduloQuino B. JeffryÎncă nu există evaluări
- Ejercicios Propuestos BioingenieriaDocument9 paginiEjercicios Propuestos BioingenieriaOscarAliagaÎncă nu există evaluări
- Filemd5440-2023-03-25 12-05-29Document13 paginiFilemd5440-2023-03-25 12-05-29ni9021118Încă nu există evaluări
- Formulario de IdentidadesDocument1 paginăFormulario de IdentidadesSaenz Leo MarianaÎncă nu există evaluări
- Sesiones N3 y N4Document19 paginiSesiones N3 y N4Lev LandauÎncă nu există evaluări
- Electromagnetismo-Tomo I Edminister (Solucionario)Document102 paginiElectromagnetismo-Tomo I Edminister (Solucionario)BRENDA BAUTISTA100% (1)
- Fórmulas NuméricoDocument19 paginiFórmulas NuméricocelesteÎncă nu există evaluări
- Reactor de Flujo No Estable SemicontinuoDocument3 paginiReactor de Flujo No Estable SemicontinuoFRANS ROMOÎncă nu există evaluări
- Problemas Termo 2Document4 paginiProblemas Termo 2Joel RamírezÎncă nu există evaluări
- Problemas Termo 2Document4 paginiProblemas Termo 2Joel RamírezÎncă nu există evaluări
- Movimiento Rectilíneo Uniforme (MRU) y MRUADocument10 paginiMovimiento Rectilíneo Uniforme (MRU) y MRUASteven ArkosÎncă nu există evaluări
- Trabajo Colaborativo 1 Unidad 2 Grupo 4 NRC 8617 EstadisticaDocument13 paginiTrabajo Colaborativo 1 Unidad 2 Grupo 4 NRC 8617 EstadisticaADALBERTO JOSUE MONTERO CHUMBAYÎncă nu există evaluări
- Mitzin Lizette: La Tarea Número Tres Consta de Tres PreguntasDocument5 paginiMitzin Lizette: La Tarea Número Tres Consta de Tres PreguntasJairÎncă nu există evaluări
- Mitzin Lizette: La Tarea Número Tres Consta de Tres PreguntasDocument5 paginiMitzin Lizette: La Tarea Número Tres Consta de Tres PreguntasJairÎncă nu există evaluări
- Clase 2 y 3Document26 paginiClase 2 y 3Alex Rojas tahuadaÎncă nu există evaluări
- Clase Funciones y Limites 800Document8 paginiClase Funciones y Limites 800oscar fabian velasquez herreraÎncă nu există evaluări
- ADA02 EcuacionesDiferencialesDocument27 paginiADA02 EcuacionesDiferencialesSofia SanchezÎncă nu există evaluări
- EyM 2°parcial - 2021 1C - Tema 1Document15 paginiEyM 2°parcial - 2021 1C - Tema 1Fede AlvarezÎncă nu există evaluări
- Minima CurvaturaDocument4 paginiMinima CurvaturaKevin Arnaldp DelgadoÎncă nu există evaluări
- Tablas de DistribucionDocument12 paginiTablas de DistribucionMichael David CamachoÎncă nu există evaluări
- CuevasGarcíaHugo 3402Document11 paginiCuevasGarcíaHugo 3402David AlmarazÎncă nu există evaluări
- Guia 2: Ejercicios de RepasoDocument13 paginiGuia 2: Ejercicios de RepasoAriana GrandeÎncă nu există evaluări
- Método Tabular Ejercicio N 1y2Document6 paginiMétodo Tabular Ejercicio N 1y2Iván A. Taipe DueñasÎncă nu există evaluări
- Ctos Ca 6Document8 paginiCtos Ca 6AngeloÎncă nu există evaluări
- Semana 01-2 Movimiento CurvilineoDocument33 paginiSemana 01-2 Movimiento CurvilineoMELITON JOSUE HUATUCO TEJEDAÎncă nu există evaluări
- Flujo Descendente en Un TuboDocument5 paginiFlujo Descendente en Un TuboDiana Andrea Zúñiga IzaguirreÎncă nu există evaluări
- Medi2 U3 A1 JeruDocument8 paginiMedi2 U3 A1 JeruJesús ÚrzuloÎncă nu există evaluări
- Solucionario Pc1 Ee410-NDocument10 paginiSolucionario Pc1 Ee410-NAnderson Queque JaccyaÎncă nu există evaluări
- GEOMETRÍA DIFERENCIAL. Teoría1Document7 paginiGEOMETRÍA DIFERENCIAL. Teoría1Raquel TorrezÎncă nu există evaluări
- Calcu 2Document1 paginăCalcu 2en2ratos franblncÎncă nu există evaluări
- Tarea 1 U2 ResumenDocument12 paginiTarea 1 U2 Resumenangel manuel lopez guzmanÎncă nu există evaluări
- Ecuaciones MRUA Horizontal-VerticalDocument3 paginiEcuaciones MRUA Horizontal-VerticalMauri GarcíaÎncă nu există evaluări
- Ecuación de Difusión Del CalorDocument14 paginiEcuación de Difusión Del CalorMarianaGiraldoÎncă nu există evaluări
- Clase 13 - Mate IV - Transformada de LaplaceDocument12 paginiClase 13 - Mate IV - Transformada de LaplaceEddy Ventoclla CelizÎncă nu există evaluări
- Análisis Trigonométrico - Ecuaciones TrigonométricasDocument4 paginiAnálisis Trigonométrico - Ecuaciones TrigonométricasGABRIEL EDUARDO PAZMIÑO VELASTEGUÍÎncă nu există evaluări
- Taller Cinética de PartículasDocument8 paginiTaller Cinética de Partículasmilton david ochoa madridÎncă nu există evaluări
- Semana 2 Cinética de La PartículaDocument33 paginiSemana 2 Cinética de La PartículaAndelato La TorreÎncă nu există evaluări
- Ecuaciones Con Números NaturálesDocument1 paginăEcuaciones Con Números NaturálesSantiago GranadaÎncă nu există evaluări
- Año Del Fortalecimiento de La Soberanía NacionalDocument14 paginiAño Del Fortalecimiento de La Soberanía NacionalElvis CalderonÎncă nu există evaluări
- Tarea11 Equipo1 FCYMDocument4 paginiTarea11 Equipo1 FCYMJoy ju JujuyÎncă nu există evaluări
- Formulario de Variable ComplejaDocument2 paginiFormulario de Variable ComplejaAngel Durán LlanosÎncă nu există evaluări
- Producto Académico 1 de Cálculo III 2019-10B PDFDocument17 paginiProducto Académico 1 de Cálculo III 2019-10B PDFYanira SegoviaÎncă nu există evaluări
- Formulario FísicaDocument1 paginăFormulario FísicaGabrielÎncă nu există evaluări
- Resolucion 2 ExamenDocument5 paginiResolucion 2 ExamenJhojanAragonÎncă nu există evaluări
- Coordendas Polares - Fis100 - 16032021Document11 paginiCoordendas Polares - Fis100 - 16032021Nicolas Ramiro Lopez RafaelÎncă nu există evaluări
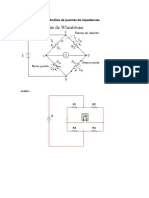
- Análisis de Puentes de ImpedanciasDocument12 paginiAnálisis de Puentes de ImpedanciasAdrian TorresÎncă nu există evaluări
- S09.s1 - Producto EscalarDocument17 paginiS09.s1 - Producto EscalarAlejandro MoÎncă nu există evaluări
- Calor ModificadaDocument2 paginiCalor ModificadaValeria Gabaldon JuarezÎncă nu există evaluări
- Curso básico de teoría de númerosDe la EverandCurso básico de teoría de númerosEvaluare: 5 din 5 stele5/5 (2)
- Ficha de Identidad 2023Document2 paginiFicha de Identidad 2023enrique esperilla espirillaÎncă nu există evaluări
- Week 1 - File - TaskDocument3 paginiWeek 1 - File - TaskJesusÎncă nu există evaluări
- Informe Capilaridad, MECANICA DE FLUIDOSDocument10 paginiInforme Capilaridad, MECANICA DE FLUIDOSAugusto Badel RubianoÎncă nu există evaluări
- Informe Violaciones DDHH en Euskadi Guerra Civil y Franquismo CAST (Azke...Document34 paginiInforme Violaciones DDHH en Euskadi Guerra Civil y Franquismo CAST (Azke...GasteizBerri.comÎncă nu există evaluări
- Prueba de Diagnostico 2013-I y SolucionarioDocument34 paginiPrueba de Diagnostico 2013-I y Solucionariocamargo420Încă nu există evaluări
- Oper.1311.222.1.t3 - Embotelladora San MiguelDocument18 paginiOper.1311.222.1.t3 - Embotelladora San MiguelRichard VillanuevaÎncă nu există evaluări
- Apuntes Introduccion Al Ambiente WindowsDocument9 paginiApuntes Introduccion Al Ambiente WindowsedoaricaÎncă nu există evaluări
- Bases TeóricasDocument3 paginiBases TeóricasPablo AcostaÎncă nu există evaluări
- Informe de Caminos IDocument22 paginiInforme de Caminos IJuan Reymundo Carrasco PalominoÎncă nu există evaluări
- Configuración de Routers ClaroDocument2 paginiConfiguración de Routers ClaroAldo Ariel Holmans Darce100% (1)
- Analisis Foda Tecnm VS UtmDocument3 paginiAnalisis Foda Tecnm VS UtmItza CamposÎncă nu există evaluări
- Teoria TriaxialDocument6 paginiTeoria TriaxialVero CaiejaÎncă nu există evaluări
- 7 - Rogers y SpinosaDocument7 pagini7 - Rogers y SpinosaCecilia Comesana DuranÎncă nu există evaluări
- Censo Poblacion FinalDocument231 paginiCenso Poblacion Finalrocio1412Încă nu există evaluări
- Tipos de BiopsiasDocument6 paginiTipos de BiopsiasKevin Carranza VillaoÎncă nu există evaluări
- La Procuración Electrónica Necesita Inteligencia de NegociosDocument2 paginiLa Procuración Electrónica Necesita Inteligencia de NegociosTecnología 21Încă nu există evaluări
- Proyecto 3 SDDocument44 paginiProyecto 3 SDGermania EscandonÎncă nu există evaluări
- Exposicion de Desarrollo PersonalDocument32 paginiExposicion de Desarrollo PersonalCarlos Antonio Camerón0% (1)
- Cuestionario de InecuacionesDocument8 paginiCuestionario de Inecuacionesmishell mendozaÎncă nu există evaluări
- Informe de ProyectoDocument38 paginiInforme de ProyectoBruno Reyes AdrianzenÎncă nu există evaluări
- Contaminacion Del Aire en TarijaDocument7 paginiContaminacion Del Aire en TarijaNahuel Ramos CespedesÎncă nu există evaluări
- Procesos Principales de Una OrganizaciónDocument48 paginiProcesos Principales de Una Organizaciónedward paezÎncă nu există evaluări
- Trabajo Final Numero 1 de Calidad Total SenatiDocument6 paginiTrabajo Final Numero 1 de Calidad Total SenatiLUIS MIGUEL YANQUE QUISPE100% (4)
- Resolución 462 2017Document10 paginiResolución 462 2017JaimColVÎncă nu există evaluări
- Ensayo de ContaDocument9 paginiEnsayo de ContaWILMAÎncă nu există evaluări
- COMENTARIO TEXTO Oposiciones SecundariaDocument2 paginiCOMENTARIO TEXTO Oposiciones SecundariaAlba Lucena Zaher100% (6)
- Taller de Tipografía Unos Tipos DurosDocument2 paginiTaller de Tipografía Unos Tipos DurosSaúl GómezÎncă nu există evaluări
- Ley SafcoDocument3 paginiLey SafcoHijo De ConocimientoÎncă nu există evaluări
- Prueba de Independencia y HomogeneidadDocument10 paginiPrueba de Independencia y HomogeneidadLotty MazaneÎncă nu există evaluări
- Colorantes para AlgodonDocument18 paginiColorantes para AlgodonJorge ApazaÎncă nu există evaluări