S-ar putea să vă placă și
- Presentacion VIERNESDocument2 paginiPresentacion VIERNESAlvaro Gurumendi QuijanoÎncă nu există evaluări
- Presentacion VIERNESDocument2 paginiPresentacion VIERNESAlvaro Gurumendi QuijanoÎncă nu există evaluări
- Presentacion VIERNESDocument2 paginiPresentacion VIERNESAlvaro Gurumendi QuijanoÎncă nu există evaluări
- Reporte Pract #4 LUDEÑADocument8 paginiReporte Pract #4 LUDEÑAAlvaro Gurumendi QuijanoÎncă nu există evaluări
- Taller 2 CondicionalesDocument5 paginiTaller 2 CondicionalesAlvaro Gurumendi QuijanoÎncă nu există evaluări
- Tematica de Diseño de Transformadores I SepDocument2 paginiTematica de Diseño de Transformadores I SepAlvaro Gurumendi QuijanoÎncă nu există evaluări
- PRESENTACION FINAL (Recuperado Automáticamente)Document7 paginiPRESENTACION FINAL (Recuperado Automáticamente)Alvaro Gurumendi QuijanoÎncă nu există evaluări
- Tarea Siglo XviiiDocument11 paginiTarea Siglo XviiiAlvaro Gurumendi QuijanoÎncă nu există evaluări
- Repotenciación de La Centra (Editado) - GURUMENDI - FINALDocument18 paginiRepotenciación de La Centra (Editado) - GURUMENDI - FINALAlvaro Gurumendi QuijanoÎncă nu există evaluări
- Repotenciación de La Centra (Editado)Document11 paginiRepotenciación de La Centra (Editado)Alvaro Gurumendi QuijanoÎncă nu există evaluări
- VAPORDocument32 paginiVAPORAlvaro Gurumendi QuijanoÎncă nu există evaluări
- Validacion de DatosDocument3 paginiValidacion de DatosAlvaro Gurumendi QuijanoÎncă nu există evaluări
- Taller 2 CondicionalesDocument5 paginiTaller 2 CondicionalesAlvaro Gurumendi QuijanoÎncă nu există evaluări
- Taller 2 CondicionalesDocument5 paginiTaller 2 CondicionalesAlvaro Gurumendi QuijanoÎncă nu există evaluări
- Taller 3 CondicionalesDocument4 paginiTaller 3 CondicionalesAlvaro Gurumendi QuijanoÎncă nu există evaluări
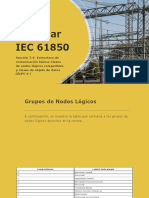
- IEC 61850 7 4 - Grupo3Document23 paginiIEC 61850 7 4 - Grupo3Alvaro Gurumendi QuijanoÎncă nu există evaluări
- Taller 3 CondicionalesDocument4 paginiTaller 3 CondicionalesAlvaro Gurumendi QuijanoÎncă nu există evaluări
- Validacion de DatosDocument3 paginiValidacion de DatosAlvaro Gurumendi QuijanoÎncă nu există evaluări
- 1 Curso Trafos enDocument63 pagini1 Curso Trafos enAlvaro Gurumendi QuijanoÎncă nu există evaluări
- Validacion de DatosDocument3 paginiValidacion de DatosAlvaro Gurumendi QuijanoÎncă nu există evaluări
- 1 Curso Trafos enDocument63 pagini1 Curso Trafos enAlvaro Gurumendi QuijanoÎncă nu există evaluări
- Taller 3 CondicionalesDocument4 paginiTaller 3 CondicionalesAlvaro Gurumendi QuijanoÎncă nu există evaluări
- IEC 61850 7 4 - Grupo3Document23 paginiIEC 61850 7 4 - Grupo3Alvaro Gurumendi QuijanoÎncă nu există evaluări
- Generación Electrica Al Costo MínimoDocument12 paginiGeneración Electrica Al Costo MínimoAlvaro Gurumendi QuijanoÎncă nu există evaluări
- Generación Electrica Al Costo MínimoDocument12 paginiGeneración Electrica Al Costo MínimoAlvaro Gurumendi QuijanoÎncă nu există evaluări
- Tarea de Problemas de FallasDocument2 paginiTarea de Problemas de FallasAlvaro Gurumendi QuijanoÎncă nu există evaluări
- Proyecto IntegradorDocument4 paginiProyecto IntegradorAlvaro Gurumendi QuijanoÎncă nu există evaluări
- Propuesta Del Tema de Materia IntegradoraDocument2 paginiPropuesta Del Tema de Materia IntegradoraAlvaro Gurumendi QuijanoÎncă nu există evaluări
- Proyecto IntegradorDocument4 paginiProyecto IntegradorAlvaro Gurumendi QuijanoÎncă nu există evaluări
- Estudio de Una Linea de SubtransmisionDocument1 paginăEstudio de Una Linea de SubtransmisionAlvaro Gurumendi QuijanoÎncă nu există evaluări
- SE-OE-XI.1 Pruebas Preoperativas y Puesta en ServicioDocument4 paginiSE-OE-XI.1 Pruebas Preoperativas y Puesta en ServiciojonklanÎncă nu există evaluări
- 1.ilusiones OpticasDocument78 pagini1.ilusiones OpticaslaurismaurisÎncă nu există evaluări
- El Sumak Kawsay Como Expresión de La Descolonialidad Del PoderDocument4 paginiEl Sumak Kawsay Como Expresión de La Descolonialidad Del PoderJuan Pablo PignattaÎncă nu există evaluări
- (605796039) Proyecto-Car-WashDocument18 pagini(605796039) Proyecto-Car-WashJumy ReynaÎncă nu există evaluări
- Proceso de forja: clasificación, métodos y defectosDocument24 paginiProceso de forja: clasificación, métodos y defectosJhoseph Rafael Paucar PradoÎncă nu există evaluări
- Leonardo Orellana TI M2 Sistema Contable Financiero IDocument10 paginiLeonardo Orellana TI M2 Sistema Contable Financiero ILeo AlexisÎncă nu există evaluări
- Qué Es El Proceso de Cuentas Por CobrarDocument11 paginiQué Es El Proceso de Cuentas Por CobrarLorena Ramirez DiazÎncă nu există evaluări
- Acoso SexualDocument55 paginiAcoso SexualRAÚL GÓMEZ HERNÁNDEZÎncă nu există evaluări
- Informe de pasantía en ingeniería mecánicaDocument9 paginiInforme de pasantía en ingeniería mecánicaDamian Ismael Cordero VintimillaÎncă nu există evaluări
- Valores ÉticosDocument2 paginiValores ÉticosAviÎncă nu există evaluări
- Intervencion para Ligadura de TrompasDocument1 paginăIntervencion para Ligadura de TrompasGriss DiazÎncă nu există evaluări
- Reino Plantae para Cuarto de PrimariaDocument5 paginiReino Plantae para Cuarto de Primariajorge de la cruzÎncă nu există evaluări
- MÓDULO # 6 - 8vo. - ARTES INDUSTRIALES - Electricidad Básica - 1 - Prof. Pedro FríasDocument8 paginiMÓDULO # 6 - 8vo. - ARTES INDUSTRIALES - Electricidad Básica - 1 - Prof. Pedro FríasAnonymous vDTinHoU9Încă nu există evaluări
- Informe Económico de La Construcción #50 - 02.22Document69 paginiInforme Económico de La Construcción #50 - 02.22Abraham A. Monteza Peralta100% (2)
- Análisis de MensajesDocument6 paginiAnálisis de MensajesPavel DelgadoÎncă nu există evaluări
- Ángel de amor: La invitación al trabajoDocument277 paginiÁngel de amor: La invitación al trabajoTammy Ramirez ZelayaÎncă nu există evaluări
- Contrato Marco de Ingeniería 2016-2018Document25 paginiContrato Marco de Ingeniería 2016-2018juanchoss82Încă nu există evaluări
- Tipos de ComprasDocument1 paginăTipos de ComprasAlexsandra GodinezÎncă nu există evaluări
- Gerencia de Desarrollo Urbano y Rural solicita acciones legales por incumplimiento de consultorDocument4 paginiGerencia de Desarrollo Urbano y Rural solicita acciones legales por incumplimiento de consultorRolan RamírezÎncă nu există evaluări
- MatemáticasDocument2 paginiMatemáticasYeimi GaitanÎncă nu există evaluări
- Trabajo de LiteraturaDocument6 paginiTrabajo de LiteraturaANAÎncă nu există evaluări
- Requisitos SssroDocument2 paginiRequisitos SssroArturo Lucana CalleÎncă nu există evaluări
- Qué Es La Norma OHSAS 18001 de Seguridad y Salud LaboralDocument2 paginiQué Es La Norma OHSAS 18001 de Seguridad y Salud LaboralRonaldÎncă nu există evaluări
- Declaracion Jurada para ComiteDocument2 paginiDeclaracion Jurada para ComiteJulio Huaqui OrizanoÎncă nu există evaluări
- Plantilla Capitulo 10.2Document12 paginiPlantilla Capitulo 10.2Sarai TeranÎncă nu există evaluări
- TAREADocument36 paginiTAREAViviana FloresÎncă nu există evaluări
- Colocacion Implantes Paso A Paso IIDocument65 paginiColocacion Implantes Paso A Paso IIperiopuello100% (1)
- La Anti-Publicidad de Sprite Como El Asesinato de Lo Social Juan Carlos UbilluzDocument18 paginiLa Anti-Publicidad de Sprite Como El Asesinato de Lo Social Juan Carlos UbilluzCarlos Rodriguez PerezÎncă nu există evaluări
- Proyecto de Vida - DocxjohanDocument6 paginiProyecto de Vida - Docxjohansaulfacundo78Încă nu există evaluări