S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Project Report On Online Streaming of VideosDocument37 paginiProject Report On Online Streaming of VideosMuhammad Usman Younas40% (5)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
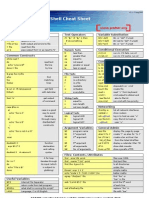
- Bash Script Cheat SheetDocument1 paginăBash Script Cheat SheetHardeep Singh100% (1)
- SQA R Paper 1Document20 paginiSQA R Paper 1anirudh devarajÎncă nu există evaluări
- Mining Infrequent Itemset Using Association Rule: P.Kavya A.KalaiselviDocument4 paginiMining Infrequent Itemset Using Association Rule: P.Kavya A.Kalaiselvianirudh devarajÎncă nu există evaluări
- Explain Multirelational Data Mining Concept in DetailDocument7 paginiExplain Multirelational Data Mining Concept in Detailanirudh devarajÎncă nu există evaluări
- Jss Science and Technology University MYSURU-570006 Department of Information Science and EngineeringDocument4 paginiJss Science and Technology University MYSURU-570006 Department of Information Science and Engineeringanirudh devarajÎncă nu există evaluări
- Li2015 PDFDocument329 paginiLi2015 PDFanirudh devarajÎncă nu există evaluări
- Assignment 3Document3 paginiAssignment 3anirudh devarajÎncă nu există evaluări
- Chapter1 PDFDocument80 paginiChapter1 PDFanirudh devarajÎncă nu există evaluări
- Memari2018 PDFDocument19 paginiMemari2018 PDFanirudh devarajÎncă nu există evaluări
- Exam 1z0 100 Oracle Linux 5 and 6 System AdministrationDocument46 paginiExam 1z0 100 Oracle Linux 5 and 6 System AdministrationBelu Ion0% (1)
- Huawei Apjii 125.19Document6 paginiHuawei Apjii 125.19Pauri AdiÎncă nu există evaluări
- PM - PIN.8175 Safety Manager Errorcode List: Version Date Approval Date Author Reference Change DescriptionDocument104 paginiPM - PIN.8175 Safety Manager Errorcode List: Version Date Approval Date Author Reference Change DescriptionLawiros100% (1)
- 5 Working With DB2 ObjectsDocument21 pagini5 Working With DB2 ObjectsrupikavalikiÎncă nu există evaluări
- XLST DebuggerDocument11 paginiXLST DebuggerthiarllisbÎncă nu există evaluări
- Sinumerik 840D SL Operate OPC UA 4 7Document11 paginiSinumerik 840D SL Operate OPC UA 4 7sudhakaran_iesÎncă nu există evaluări
- FMI-Specification-2 0 1Document128 paginiFMI-Specification-2 0 1mitiwanaÎncă nu există evaluări
- Class Xii Sample Paper Computer Science Set-Iii PDFDocument3 paginiClass Xii Sample Paper Computer Science Set-Iii PDFSaurabh jaiswalÎncă nu există evaluări
- Introduction To Hive: Liyin Tang Liyintan@usc - EduDocument24 paginiIntroduction To Hive: Liyin Tang Liyintan@usc - EduNaveen ReddyÎncă nu există evaluări
- Chapter3 1 PDFDocument19 paginiChapter3 1 PDFaliÎncă nu există evaluări
- SAP HR - UtilDocument14 paginiSAP HR - UtileezequiellÎncă nu există evaluări
- DTN NS3Document4 paginiDTN NS3Mirza RizkyÎncă nu există evaluări
- Diamond Known IssuesDocument92 paginiDiamond Known IssuesPetr BruzaÎncă nu există evaluări
- ExcelDocument12 paginiExcelMuhammad WaqasÎncă nu există evaluări
- Memo To Users IBM I 7.1Document74 paginiMemo To Users IBM I 7.1Anonymous c1oc6LeRÎncă nu există evaluări
- AutoIt Automation NotesDocument11 paginiAutoIt Automation NotesJohn NguyenÎncă nu există evaluări
- Comandos RacfDocument716 paginiComandos RacfPablo SeguridadÎncă nu există evaluări
- Cisco BGP ASPATH FilterDocument115 paginiCisco BGP ASPATH FilterHalison SantosÎncă nu există evaluări
- Data Services SizingDocument15 paginiData Services SizingMurali Devarinti100% (1)
- Using Flexcel ReportsDocument7 paginiUsing Flexcel ReportsHendra Dwi PrasetyaÎncă nu există evaluări
- SIP CPE DevicesDocument210 paginiSIP CPE DevicesAlejo EtxebeÎncă nu există evaluări
- Trace BackDocument2 paginiTrace BackpalemeraldÎncă nu există evaluări
- Hitachi Tiered Storage Manager Software DatasheetDocument2 paginiHitachi Tiered Storage Manager Software DatasheetPravin KamtheÎncă nu există evaluări
- Welcome To Design PatternsDocument41 paginiWelcome To Design PatternsAdnan QaisarÎncă nu există evaluări
- AN153 StudDocument570 paginiAN153 StudpamukumarÎncă nu există evaluări
- All Itt Questions 60Document572 paginiAll Itt Questions 60Vaseem AhmadÎncă nu există evaluări
- Exor LogsDocument701 paginiExor LogsJuan Francisco Blasco GameroÎncă nu există evaluări
- Chapter 8 - HashingDocument78 paginiChapter 8 - HashingsarvaangÎncă nu există evaluări