S-ar putea să vă placă și
- Toma de DecisionesDocument12 paginiToma de DecisionesJuve Hernandez Rojas67% (3)
- Guia Programacion Dkda 16 32 80Document276 paginiGuia Programacion Dkda 16 32 80larata29Încă nu există evaluări
- Laboratorio de Fisica - RozamientoDocument23 paginiLaboratorio de Fisica - RozamientoOM Gonzalo100% (1)
- Actividad 1 - Diagramas de Cortante y Momentos - Pensamiento Lógico - Exenover Mora Lombana PDFDocument21 paginiActividad 1 - Diagramas de Cortante y Momentos - Pensamiento Lógico - Exenover Mora Lombana PDFMora ExcenoverÎncă nu există evaluări
- Problemario - Teoría de ColasDocument4 paginiProblemario - Teoría de ColasJavier MedinaÎncă nu există evaluări
- 2° Simulacro Presencial (UNMSM 2019-II) PDFDocument16 pagini2° Simulacro Presencial (UNMSM 2019-II) PDFAndré Fernández50% (2)
- MIII 001 006 Prelindice PDFDocument6 paginiMIII 001 006 Prelindice PDFMaría Isabel Ordóñez0% (2)
- Bitácora Instalaciones EléctricasDocument120 paginiBitácora Instalaciones EléctricasJuve Hernandez Rojas50% (4)
- Metodos para Identificar ProblemasDocument12 paginiMetodos para Identificar ProblemasJuve Hernandez RojasÎncă nu există evaluări
- Tranformador de Pedestal 150 KvaDocument1 paginăTranformador de Pedestal 150 KvaJuve Hernandez RojasÎncă nu există evaluări
- Metodo CientificoDocument11 paginiMetodo CientificoJuve Hernandez RojasÎncă nu există evaluări
- Análisis Del PlanoDocument11 paginiAnálisis Del PlanoJuve Hernandez RojasÎncă nu există evaluări
- Calculo Paneles SolaresDocument2 paginiCalculo Paneles SolaresJuve Hernandez RojasÎncă nu există evaluări
- Delegacion de AutoridadDocument6 paginiDelegacion de AutoridadJuve Hernandez RojasÎncă nu există evaluări
- Matriz FodaDocument2 paginiMatriz FodaJuve Hernandez RojasÎncă nu există evaluări
- Plan de negocios para empresa de VeracruzDocument6 paginiPlan de negocios para empresa de VeracruzJuve Hernandez RojasÎncă nu există evaluări
- Unidad Verificadora W V PDocument15 paginiUnidad Verificadora W V PJuve Hernandez RojasÎncă nu există evaluări
- Tipos de DecisionesDocument6 paginiTipos de DecisionesJuve Hernandez RojasÎncă nu există evaluări
- BPC SDocument2 paginiBPC SJuve Hernandez RojasÎncă nu există evaluări
- Gestion y LiderazgoDocument10 paginiGestion y LiderazgoJuve Hernandez RojasÎncă nu există evaluări
- PROBLEMA ConceptoDocument10 paginiPROBLEMA ConceptoJuve Hernandez RojasÎncă nu există evaluări
- Unidad Verificadora W V PDocument15 paginiUnidad Verificadora W V PJuve Hernandez RojasÎncă nu există evaluări
- Tema 3 Unidades de LuminotecniaDocument19 paginiTema 3 Unidades de LuminotecniaJuve Hernandez RojasÎncă nu există evaluări
- Alcance Transformador de Pedestal 150 KvaDocument5 paginiAlcance Transformador de Pedestal 150 KvaJuve Hernandez RojasÎncă nu există evaluări
- Awelo Unidad 3Document40 paginiAwelo Unidad 3Juve Hernandez RojasÎncă nu există evaluări
- Bitacora Equipos MecanicosDocument24 paginiBitacora Equipos MecanicosJuve Hernandez RojasÎncă nu există evaluări
- Cálculo para La Instalación de Paneles Solares en Una ZonaDocument3 paginiCálculo para La Instalación de Paneles Solares en Una ZonaJuve Hernandez RojasÎncă nu există evaluări
- Acusejul PDFDocument1 paginăAcusejul PDFJuve Hernandez RojasÎncă nu există evaluări
- Bitacora Instalaciones ElectricasDocument17 paginiBitacora Instalaciones ElectricasJuve Hernandez RojasÎncă nu există evaluări
- Obtención Zbus Por Medio de YbusDocument3 paginiObtención Zbus Por Medio de YbusJuve Hernandez RojasÎncă nu există evaluări
- Campechano. Método de Los MvaDocument4 paginiCampechano. Método de Los MvaJuve Hernandez RojasÎncă nu există evaluări
- Método de Los MVADocument4 paginiMétodo de Los MVAJuve Hernandez RojasÎncă nu există evaluări
- Cálculo de Las Corrientes de AportaciónDocument4 paginiCálculo de Las Corrientes de AportaciónJuve Hernandez RojasÎncă nu există evaluări
- Método de Los MVADocument4 paginiMétodo de Los MVAJuve Hernandez RojasÎncă nu există evaluări
- Obtención Zbus Por Medio de YbusDocument3 paginiObtención Zbus Por Medio de YbusJuve Hernandez RojasÎncă nu există evaluări
- Campechano. Método de Los MvaDocument4 paginiCampechano. Método de Los MvaJuve Hernandez RojasÎncă nu există evaluări
- Mapa Conceptual Algebra Lineal Alvaro ADocument1 paginăMapa Conceptual Algebra Lineal Alvaro AAlvaro AvilaÎncă nu există evaluări
- Práctica 4 (PE)Document3 paginiPráctica 4 (PE)Gnz PomaÎncă nu există evaluări
- Silabo de Calculo Dif e Integral - FieeDocument10 paginiSilabo de Calculo Dif e Integral - FieeGerardo Jhunior Torres RiquerosÎncă nu există evaluări
- Definición de rectas paralelas eje coordenadasDocument6 paginiDefinición de rectas paralelas eje coordenadasAlbert ChiÎncă nu există evaluări
- Análisis de vibraciones industriales mediante transformada de FourierDocument54 paginiAnálisis de vibraciones industriales mediante transformada de Fouriersergio rivaderaÎncă nu există evaluări
- Capitulo 7Document35 paginiCapitulo 7lissetÎncă nu există evaluări
- Practice 02 PDFDocument3 paginiPractice 02 PDFJhonny CorillocllaÎncă nu există evaluări
- Labo Cod Bina BCD FIEE 2018 PDFDocument3 paginiLabo Cod Bina BCD FIEE 2018 PDFEsmeralda Quispe LeónÎncă nu există evaluări
- Balance Hídrico Mensual en Un Embalse3Document8 paginiBalance Hídrico Mensual en Un Embalse3Kelly CondoriÎncă nu există evaluări
- Sistema AxiomáticoDocument4 paginiSistema AxiomáticoAngieÎncă nu există evaluări
- Realizacion de Curvas de Calibración para Proteínas y Azúcares ReductoresDocument6 paginiRealizacion de Curvas de Calibración para Proteínas y Azúcares ReductoresFeerÎncă nu există evaluări
- EXAMEN Metodologia InvestigacionDocument4 paginiEXAMEN Metodologia InvestigacionAsalturmmsÎncă nu există evaluări
- Cuaterniones y Rotación en El EspacioDocument4 paginiCuaterniones y Rotación en El EspacioJavier Garcia RajoyÎncă nu există evaluări
- Ecuaciones DiferencialesDocument10 paginiEcuaciones DiferencialesKelly AstochadoÎncă nu există evaluări
- Análisis de características en cerdos para selecciónDocument8 paginiAnálisis de características en cerdos para selecciónGarcía Fernández FernandoÎncă nu există evaluări
- Manual de Maquinas Electricas Ut TecamachalcoDocument139 paginiManual de Maquinas Electricas Ut TecamachalcoJuanÎncă nu există evaluări
- Quien Quiere Ser MillonarioDocument8 paginiQuien Quiere Ser MillonarioCLAUDIA LORENA PERDOMO PASCUASÎncă nu există evaluări
- Dibujo TécnicoDocument18 paginiDibujo TécnicoJose AguilarÎncă nu există evaluări
- Tema1 FUNCIONES DE VARIAS VARIABLESDocument37 paginiTema1 FUNCIONES DE VARIAS VARIABLESBeto SuárezÎncă nu există evaluări
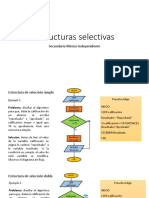
- Estructuras Selectivas - Ejemplos de Diagramas de FlujoDocument3 paginiEstructuras Selectivas - Ejemplos de Diagramas de FlujoProfa. Ivonne RiveraÎncă nu există evaluări
- Cuadernillo de AsignaturasDocument123 paginiCuadernillo de AsignaturasHernán David TorresÎncă nu există evaluări
- PARTÍCULAS - El Puente Entre La Geología y MetalurgiaDocument14 paginiPARTÍCULAS - El Puente Entre La Geología y MetalurgiaSteven Luis Maiz CespedesÎncă nu există evaluări
- Topografia 04Document53 paginiTopografia 04IngriMonzón50% (2)
- Guía de Aplicaciones IDocument38 paginiGuía de Aplicaciones IFrank RoMaÎncă nu există evaluări