S-ar putea să vă placă și
- Ogatasol 2Document51 paginiOgatasol 2Emiliano SegovianoÎncă nu există evaluări
- Conversor Analógico - Digital para MATLAB. INACAP Concepción-Talcahuano.Document4 paginiConversor Analógico - Digital para MATLAB. INACAP Concepción-Talcahuano.EnergonÎncă nu există evaluări
- Planta Quanser SRV02Document6 paginiPlanta Quanser SRV02Valentina Sandoval BetancourtÎncă nu există evaluări
- Planta Quanser SRV02Document6 paginiPlanta Quanser SRV02Marcela Peña100% (1)
- Entrada Tipo ParabolaDocument28 paginiEntrada Tipo ParabolaJuan Camilo NaranjoÎncă nu există evaluări
- Control Clásico Vs Control ModernoDocument15 paginiControl Clásico Vs Control ModernoJorgeValdz100% (2)
- LAB1 - Control de Posición Angular de Un Motor DCDocument5 paginiLAB1 - Control de Posición Angular de Un Motor DCJorge Mideros ArboledaÎncă nu există evaluări
- Examen Circuitos Secuenciales - 24-01-2019Document1 paginăExamen Circuitos Secuenciales - 24-01-2019AdriánÎncă nu există evaluări
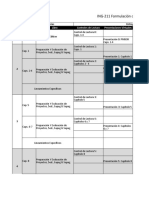
- ING-211 - Programa Modalidad Virtual (Carlos Artilez)Document6 paginiING-211 - Programa Modalidad Virtual (Carlos Artilez)Victor Amaurys PerezÎncă nu există evaluări
- VERTEDEROS (Grupo 4)Document31 paginiVERTEDEROS (Grupo 4)JULIO EINSTEN FERNANDEZ FUSTAMANTEÎncă nu există evaluări
- Practica 2 - Convertidor Analogico Digital Discreto-1Document4 paginiPractica 2 - Convertidor Analogico Digital Discreto-1Andres100% (2)
- Proyecto de Control AnalogoDocument24 paginiProyecto de Control AnalogoMónik TelloÎncă nu există evaluări
- Sistemas de Datos MuestreadosDocument6 paginiSistemas de Datos MuestreadosJosé Roberto MárquezÎncă nu există evaluări
- Comando IDENT MatlabDocument7 paginiComando IDENT Matlabangel guerreroÎncă nu există evaluări
- Control de Posición de Un Servomotor Utilizando La Tarjeta de Desarrollo NEXYS 2 y VHDLDocument6 paginiControl de Posición de Un Servomotor Utilizando La Tarjeta de Desarrollo NEXYS 2 y VHDLSandoval DanielÎncă nu există evaluări
- Control Pid Con Lm35 para ArduinoDocument6 paginiControl Pid Con Lm35 para ArduinoJuan Navarrete GuzmanÎncă nu există evaluări
- Control PID Discreto y ConexionXBeeDocument29 paginiControl PID Discreto y ConexionXBeeAlexander ValenciaÎncă nu există evaluări
- 1.3 Control Clasico Vs Control ModernoDocument11 pagini1.3 Control Clasico Vs Control ModernoAdolfo RaygozaÎncă nu există evaluări
- Compensadores Mediante MatlabDocument3 paginiCompensadores Mediante MatlabAngel FullerÎncă nu există evaluări
- Introducción Al Modelado de Sistemas FísicosDocument7 paginiIntroducción Al Modelado de Sistemas FísicosJavier AguilarÎncă nu există evaluări
- 09-A-Cap007 Diseño de CompensadoresDocument33 pagini09-A-Cap007 Diseño de CompensadoresCarlos ChÎncă nu există evaluări
- Ejercicios de Transformada ZDocument4 paginiEjercicios de Transformada ZLuis Eduardo Rangel Martinez100% (2)
- Conversión de Código Gray A 7 SegmentoDocument8 paginiConversión de Código Gray A 7 SegmentoValentina RoyeroÎncă nu există evaluări
- Funcion Transferencia, Seguidor de LineaDocument3 paginiFuncion Transferencia, Seguidor de LineaLuigi Yaksetig LoayzaÎncă nu există evaluări
- 3.TRANSISTORES OPTOELECTRÓNICOS PrepaDocument2 pagini3.TRANSISTORES OPTOELECTRÓNICOS PrepaDavidCaloÎncă nu există evaluări
- Taller 2Document2 paginiTaller 2api-3711530Încă nu există evaluări
- Jacobiano y SingularidadesDocument9 paginiJacobiano y SingularidadesDanielaÎncă nu există evaluări
- Lugar Geometrico de Las RaicesDocument33 paginiLugar Geometrico de Las RaicesAquiles Moya67% (3)
- Control Analógico de Posición de Un Motor DCDocument17 paginiControl Analógico de Posición de Un Motor DCLuis FonsecaÎncă nu există evaluări
- Reglas para La Construcción Del Lugar de Raíces de Un SistemaDocument5 paginiReglas para La Construcción Del Lugar de Raíces de Un Sistemamdonnet9Încă nu există evaluări
- Reporte Practica #2Document14 paginiReporte Practica #2SylvIa RosalesÎncă nu există evaluări
- El Puente HDocument75 paginiEl Puente HElias Wilder Solano HuaroccÎncă nu există evaluări
- Manejo de TemporizadoresDocument11 paginiManejo de TemporizadoresAdrian Del CastilloÎncă nu există evaluări
- Diseño e Implementacion de Un Circuito de Acondicionamiento de La Señal para Una Termocupla Tipo KDocument3 paginiDiseño e Implementacion de Un Circuito de Acondicionamiento de La Señal para Una Termocupla Tipo KDiego Castro PlazasÎncă nu există evaluări
- Troceadores A B CDocument3 paginiTroceadores A B CSamuel ChimborazoÎncă nu există evaluări
- Ejemplo #1. Ejemplo #1.: Análisis Del Lugar Geométrico de Las Raíces (LGR) Ó Método de EvansDocument42 paginiEjemplo #1. Ejemplo #1.: Análisis Del Lugar Geométrico de Las Raíces (LGR) Ó Método de EvansBrayan100% (1)
- Oscilador de Relajación Con Transistor UJTDocument2 paginiOscilador de Relajación Con Transistor UJTMeza Puchoc JeanÎncă nu există evaluări
- Practica 2 Máquinas de EstadoDocument27 paginiPractica 2 Máquinas de EstadoEdgar MartinezÎncă nu există evaluări
- Informe Sample and HoldDocument2 paginiInforme Sample and HoldLAURA NATALIA MOTTA CADENAÎncă nu există evaluări
- Troceador de Un CuadranteDocument28 paginiTroceador de Un CuadranteKaro Pand FloresÎncă nu există evaluări
- Práctica No. 10 Control de Motor DC Con Relay, ESP32, Sensor de Temperatura LM35Document10 paginiPráctica No. 10 Control de Motor DC Con Relay, ESP32, Sensor de Temperatura LM35Xchel Adrian Hernandez AlvarezÎncă nu există evaluări
- Practica 1 - Compensador de Adelanto - LDRDocument6 paginiPractica 1 - Compensador de Adelanto - LDRovertan77Încă nu există evaluări
- Colector de Delgas QuindeDocument8 paginiColector de Delgas QuindeJos Quind100% (1)
- Control Digital Motor DCDocument23 paginiControl Digital Motor DCantonyglzÎncă nu există evaluări
- Clase 8 Función de Transferencia PulsoDocument11 paginiClase 8 Función de Transferencia PulsojajueralÎncă nu există evaluări
- Apuntes de Electronica de Potencia LibroDocument463 paginiApuntes de Electronica de Potencia LibroOrlando Palomino PrietoÎncă nu există evaluări
- Error en Estado Estacionario 1 PDFDocument8 paginiError en Estado Estacionario 1 PDFJhOel Osores VÎncă nu există evaluări
- Laboratorio 5 Atmega Comunicación Serial SpiDocument9 paginiLaboratorio 5 Atmega Comunicación Serial SpiArturo72Încă nu există evaluări
- Proyecto Instrumentacion Electronica 1Document12 paginiProyecto Instrumentacion Electronica 1Nicolas ValbuenaÎncă nu există evaluări
- Marco Teorico de VHDLDocument11 paginiMarco Teorico de VHDLMiguel VeraÎncă nu există evaluări
- Control Analogico PID PDFDocument40 paginiControl Analogico PID PDFAlfredo MamaniÎncă nu există evaluări
- Diseño y Construcción de Un Tacómetro Digital Mediante El Uso de Una Placa ArduinoDocument2 paginiDiseño y Construcción de Un Tacómetro Digital Mediante El Uso de Una Placa ArduinoBobbyÎncă nu există evaluări
- Proyecto DigitalesDocument4 paginiProyecto DigitalesDanny CarvajalÎncă nu există evaluări
- Practica 1Document13 paginiPractica 1Jose Antonio Castro AyalaÎncă nu există evaluări
- Control Digital DirectoDocument4 paginiControl Digital DirectoCristianGabrielSanchezNazrÎncă nu există evaluări
- Configuración Timer0 ATmega 164pDocument41 paginiConfiguración Timer0 ATmega 164pEhf125Încă nu există evaluări
- Diseño de Sistemas Reguladores Con ObservadoresDocument41 paginiDiseño de Sistemas Reguladores Con ObservadoresMax100% (1)
- Evaluación Módulo 1. Tema 1 y 2 MICHAEL DANIEL ORDOÑEZ PALOMARDocument5 paginiEvaluación Módulo 1. Tema 1 y 2 MICHAEL DANIEL ORDOÑEZ PALOMARMichael Daniel Ordoñes PalomarÎncă nu există evaluări
- Modelamiento de Un Sistema de Control de Posición de Un Lanza Misiles PDFDocument11 paginiModelamiento de Un Sistema de Control de Posición de Un Lanza Misiles PDFLuis AmantaÎncă nu există evaluări
- Control PIDDocument65 paginiControl PIDChristian OqÎncă nu există evaluări
- Control de VelocidadDocument16 paginiControl de VelocidadPatricio AstudilloÎncă nu există evaluări
- Diseño de Un Servomecanismo de PosiciónDocument12 paginiDiseño de Un Servomecanismo de PosiciónDiego Vidarte100% (1)
- El Informe RadiológicoDocument17 paginiEl Informe RadiológicoVictor Amaurys PerezÎncă nu există evaluări
- Tarea 2.3Document6 paginiTarea 2.3Victor Amaurys PerezÎncă nu există evaluări
- 2014 El Informe y Su FormaDocument1 pagină2014 El Informe y Su FormaVictor Amaurys PerezÎncă nu există evaluări
- Tarea 1Document5 paginiTarea 1Victor Amaurys PerezÎncă nu există evaluări
- Tarea 5Document4 paginiTarea 5Victor Amaurys PerezÎncă nu există evaluări
- Tarea 2.1Document12 paginiTarea 2.1Victor Amaurys PerezÎncă nu există evaluări
- Tarea 2.2Document5 paginiTarea 2.2Victor Amaurys PerezÎncă nu există evaluări
- Tarea 3.1Document6 paginiTarea 3.1Victor Amaurys PerezÎncă nu există evaluări
- Tarea 1.1Document8 paginiTarea 1.1Victor Amaurys PerezÎncă nu există evaluări
- Tarea 1.2Document7 paginiTarea 1.2Victor Amaurys PerezÎncă nu există evaluări
- Proyecto Administración de ProyectosDocument30 paginiProyecto Administración de ProyectosVictor Amaurys PerezÎncă nu există evaluări
- Proyecto Procesos de ManufacturaDocument12 paginiProyecto Procesos de ManufacturaVictor Amaurys PerezÎncă nu există evaluări
- Reporte Brazo Robotico BluetoothDocument7 paginiReporte Brazo Robotico BluetoothVictor Amaurys PerezÎncă nu există evaluări
- Proyecto Seguridad Industrial y Salud OcupacionalDocument17 paginiProyecto Seguridad Industrial y Salud OcupacionalVictor Amaurys PerezÎncă nu există evaluări
- Proyecto Desarrollo de EmprendedoresDocument24 paginiProyecto Desarrollo de EmprendedoresVictor Amaurys PerezÎncă nu există evaluări
- Reporte Caja AcústicaDocument14 paginiReporte Caja AcústicaVictor Amaurys PerezÎncă nu există evaluări
- Tema 1. Metrología.Document39 paginiTema 1. Metrología.Jose Luis LunaÎncă nu există evaluări
- Numero de ReynoldsDocument10 paginiNumero de ReynoldsKlaida Krissbell BarónÎncă nu există evaluări
- Análisis de La Eficiencia de Un Moto VentiladorDocument6 paginiAnálisis de La Eficiencia de Un Moto VentiladorJMidagamaGalindoÎncă nu există evaluări
- Preinforme de Práctica 6Document7 paginiPreinforme de Práctica 6Mila Gomez BadilloÎncă nu există evaluări
- Sistema de Gestion de EnergiaDocument6 paginiSistema de Gestion de EnergiaChristian BryanÎncă nu există evaluări
- Estandar de Trabajos Con Soldadura ElectricaDocument6 paginiEstandar de Trabajos Con Soldadura ElectricaDave ChecaÎncă nu există evaluări
- Calculo de GriffoDocument22 paginiCalculo de GriffoMichelDavisÎncă nu există evaluări
- MEDIA TENSION (1) (Recuperado Automáticamente)Document14 paginiMEDIA TENSION (1) (Recuperado Automáticamente)Ivan HuertaÎncă nu există evaluări
- Diseño de Sistema de Aire AcondicionadoDocument61 paginiDiseño de Sistema de Aire AcondicionadoJosé Francisco Lara AguilarÎncă nu există evaluări
- Proyecto de Grado de MecanicaDocument12 paginiProyecto de Grado de MecanicaJorgeÎncă nu există evaluări
- Lubricantes para Maquinaria PesadaDocument5 paginiLubricantes para Maquinaria PesadaLuis fernando Puchuri pallaniÎncă nu există evaluări
- Ejemplo EmpresaaaDocument17 paginiEjemplo EmpresaaaAnn MejiaÎncă nu există evaluări
- BUQUES RORO - Proyecto Introd. Ing NavalDocument35 paginiBUQUES RORO - Proyecto Introd. Ing NavalJoelithoo Jd Dimas FeradoDicollen'0% (1)
- ITBA - Terminacion - Pistoneo 1Document17 paginiITBA - Terminacion - Pistoneo 1Federico Arquero100% (1)
- Comprobacion Del Principio de BernoulliDocument10 paginiComprobacion Del Principio de BernoulliLenin Alfaro VidalÎncă nu există evaluări
- Modulo 3 Unidad #9 Curso Operación de Calderas Acuotubulares de Alta PresiónDocument46 paginiModulo 3 Unidad #9 Curso Operación de Calderas Acuotubulares de Alta PresiónemilioÎncă nu există evaluări
- YPF-Protección CatódicaDocument15 paginiYPF-Protección CatódicaJose PerezÎncă nu există evaluări
- C15 Ruptura+celularDocument30 paginiC15 Ruptura+celularKathia Isabel Aguillón MascorroÎncă nu există evaluări
- 5-Absorcion AtomicaDocument41 pagini5-Absorcion AtomicaElizabeth HrÎncă nu există evaluări
- Grupo 4. RetacadoDocument23 paginiGrupo 4. RetacadoVictor Guanilo VenturaÎncă nu există evaluări
- Guía Del Consumo y Facturación de Energía EléctricaDocument13 paginiGuía Del Consumo y Facturación de Energía EléctricaGerardo Reátegui SchraderÎncă nu există evaluări
- C2 ResumenDocument15 paginiC2 ResumenGrim CraftsÎncă nu există evaluări
- Electrical Machinery - Fitzgerald-205-276 CAPITULO 4-35-72.en - EsDocument38 paginiElectrical Machinery - Fitzgerald-205-276 CAPITULO 4-35-72.en - EsMarvin LiraÎncă nu există evaluări
- Amplificador de Audio LA4445 Estereo en 12 VoltiosDocument3 paginiAmplificador de Audio LA4445 Estereo en 12 Voltiosjjimenez24Încă nu există evaluări
- Taller 3 Semana 7 Grupo 7 Informe BiomasaDocument4 paginiTaller 3 Semana 7 Grupo 7 Informe BiomasaMario ManobandaÎncă nu există evaluări
- 10.modelos de Difusionv TurbulentaDocument23 pagini10.modelos de Difusionv TurbulentaalexÎncă nu există evaluări
- Recursos Naturales Del PerúDocument4 paginiRecursos Naturales Del Perúruddyhacker0% (1)
- AceitesDocument27 paginiAceiteseddie2166Încă nu există evaluări
- Msds Thinner Acrilico StandarDocument4 paginiMsds Thinner Acrilico StandarFernando NavarroÎncă nu există evaluări