S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- 【书籍】Modern Robotics Mechanics, Planning, And ControlDocument640 pagini【书籍】Modern Robotics Mechanics, Planning, And ControlWENQI ZHONGÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- n0 - ARCODE Parameter Reference V11.enDocument75 paginin0 - ARCODE Parameter Reference V11.enمحمد حسين100% (2)
- Electric Motor and GeneratorDocument6 paginiElectric Motor and GeneratorJesell JeanÎncă nu există evaluări
- Compact and Efficient: Rotary KilnsDocument4 paginiCompact and Efficient: Rotary KilnsNhaca100% (1)
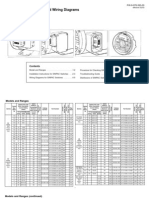
- Installation Instructions and Wiring Diagrams For All Models and RangesDocument8 paginiInstallation Instructions and Wiring Diagrams For All Models and RangesMaria MusyÎncă nu există evaluări
- Sample Apdf User InputDocument21 paginiSample Apdf User InputginjackÎncă nu există evaluări
- Motorpact Fuse Calculator V2R0Document1 paginăMotorpact Fuse Calculator V2R0sani priadiÎncă nu există evaluări
- Washing Machine TchnologyDocument41 paginiWashing Machine Tchnologyvenu vaniÎncă nu există evaluări
- PUHZ-RP35-140 Service Manual (OC334A) PDFDocument138 paginiPUHZ-RP35-140 Service Manual (OC334A) PDFjose antonio MelladoÎncă nu există evaluări
- 180 Series Servo Motors: Dimension: Unit MMDocument1 pagină180 Series Servo Motors: Dimension: Unit MMMax QuintanillaÎncă nu există evaluări
- Design and Fabrication of Pneumatic Sheet Metal Cutting and Bending MachineDocument9 paginiDesign and Fabrication of Pneumatic Sheet Metal Cutting and Bending MachineKanaga VaratharajanÎncă nu există evaluări
- AUGUST 2019 Surplus Record Machinery & Equipment DirectoryDocument717 paginiAUGUST 2019 Surplus Record Machinery & Equipment DirectorySurplus RecordÎncă nu există evaluări
- Amba Flex SV - SeriesDocument75 paginiAmba Flex SV - SeriesVasiliyÎncă nu există evaluări
- Starting IMDocument32 paginiStarting IMمصطفى حمدىÎncă nu există evaluări
- JCB Vibromax - Compaction Equipment Self-Propelled Vibratory Roller Vm75D/Vm75PdDocument2 paginiJCB Vibromax - Compaction Equipment Self-Propelled Vibratory Roller Vm75D/Vm75PdArbey GonzalezÎncă nu există evaluări
- Electric Motor EfficiencyDocument6 paginiElectric Motor EfficiencyCalÎncă nu există evaluări
- Dyna Edm Motor Drive: SettingsDocument2 paginiDyna Edm Motor Drive: SettingsDilhara WickramaarachchiÎncă nu există evaluări
- Characterization of Electric Motor Drives For Traction ApplicationDocument6 paginiCharacterization of Electric Motor Drives For Traction ApplicationShivu5art workÎncă nu există evaluări
- 3 RD Semester NSQFQBCTSDocument45 pagini3 RD Semester NSQFQBCTSKiran AithalÎncă nu există evaluări
- TriboLab Brochure-BRUKERDocument8 paginiTriboLab Brochure-BRUKERfernandochinas2253Încă nu există evaluări
- Aeroterma Galeti - S80-ManualDocument24 paginiAeroterma Galeti - S80-Manualclaudiadaniela016880Încă nu există evaluări
- 16 MarksDocument4 pagini16 MarksAnand RamanÎncă nu există evaluări
- Power System Protection 2Nd Edition Paul M Anderson All ChapterDocument67 paginiPower System Protection 2Nd Edition Paul M Anderson All Chapterfelix.ponder174100% (7)
- Varistar VSDDocument2 paginiVaristar VSDThomasRudyÎncă nu există evaluări
- (Manual) Whistle SystemDocument13 pagini(Manual) Whistle SystemSergei KurpishÎncă nu există evaluări
- DM 860 HDocument25 paginiDM 860 HGiorgio FernandesÎncă nu există evaluări
- Latest Circuit Description of WDS6 Loco With WW GovernorDocument13 paginiLatest Circuit Description of WDS6 Loco With WW GovernormajjisatÎncă nu există evaluări
- PACS Series Packaged Air Conditioners: (Range 5 TR To 54 TR) (18 KW To 190 KW)Document35 paginiPACS Series Packaged Air Conditioners: (Range 5 TR To 54 TR) (18 KW To 190 KW)Ahmad SalahÎncă nu există evaluări
- Catalogue Mining and Heavy Industry 2017-12-12 enDocument40 paginiCatalogue Mining and Heavy Industry 2017-12-12 enjjcadena2000Încă nu există evaluări
- E L e C T R I C A L e N G I N e e R I N GDocument8 paginiE L e C T R I C A L e N G I N e e R I N GPope SmithÎncă nu există evaluări