S-ar putea să vă placă și
- (Steven L. Kramer) Geotechnical Earthquake EngineeDocument673 pagini(Steven L. Kramer) Geotechnical Earthquake EngineeOlivera Vušović Čolović90% (21)
- PaigeDocument15 paginiPaigeklomps_jrÎncă nu există evaluări
- Seismic Behavior Characteristic of High Damping Rubber Bearing Through Shaking Table TestDocument11 paginiSeismic Behavior Characteristic of High Damping Rubber Bearing Through Shaking Table TestAndy GarciaÎncă nu există evaluări
- Transient Thermal and Structural Analysis of Rotor Disc of Disk PDFDocument8 paginiTransient Thermal and Structural Analysis of Rotor Disc of Disk PDFAnonymous ZVUIPqÎncă nu există evaluări
- Rubber Isostatic Pressing and Cold Isostatic Pressing of Metal PowderDocument9 paginiRubber Isostatic Pressing and Cold Isostatic Pressing of Metal PowderSheikh UbaidÎncă nu există evaluări
- Mechanical Properties For Polyester Resin Reinforce With Fe Weave WireDocument5 paginiMechanical Properties For Polyester Resin Reinforce With Fe Weave WireInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Stimulation of Three Point Bending Test For AluminumDocument12 paginiStimulation of Three Point Bending Test For Aluminumabdul rahmanÎncă nu există evaluări
- Plain Bearings Made From Engineering PlasticsDocument44 paginiPlain Bearings Made From Engineering PlasticsJani LahdelmaÎncă nu există evaluări
- Effects of Rolling Speed On Microstructure and Mechanical Properties of Al-1050-H4 During Accumulative Roll Bonding (Arb)Document8 paginiEffects of Rolling Speed On Microstructure and Mechanical Properties of Al-1050-H4 During Accumulative Roll Bonding (Arb)TJPRC PublicationsÎncă nu există evaluări
- Presentation Coupler SystemDocument21 paginiPresentation Coupler SystemPralhad Kore100% (1)
- Numerical SBR IndentationDocument8 paginiNumerical SBR IndentationAmina DinariÎncă nu există evaluări
- Selection of The Disc Brake Material Using Pin On Disc ApparatusDocument7 paginiSelection of The Disc Brake Material Using Pin On Disc ApparatusIJIERT-International Journal of Innovations in Engineering Research and TechnologyÎncă nu există evaluări
- An Optimization of Rubber Bushing Material and Structural ParametersDocument5 paginiAn Optimization of Rubber Bushing Material and Structural ParametersRajaSekarsajjaÎncă nu există evaluări
- Helicopter StructureDocument10 paginiHelicopter StructuredivyaÎncă nu există evaluări
- Chrome-Extension Mhjfbmdgcfjbbpaeojofohoefgiehjai IndexDocument11 paginiChrome-Extension Mhjfbmdgcfjbbpaeojofohoefgiehjai IndexPACO PAQUETINESÎncă nu există evaluări
- Effect of BarDocument9 paginiEffect of Barpunith_064Încă nu există evaluări
- Numerical Analysis of Composite LayeredDocument10 paginiNumerical Analysis of Composite LayeredDaniel Mary's MosisaÎncă nu există evaluări
- Design and Analysis of Carbon Fiber / Epoxy Resin Brake RotorDocument6 paginiDesign and Analysis of Carbon Fiber / Epoxy Resin Brake RotorIOSRjournalÎncă nu există evaluări
- Analysis of Vibration Response From High Damping RDocument8 paginiAnalysis of Vibration Response From High Damping RBastian Artanto AmpangalloÎncă nu există evaluări
- Harmonic Analysis of Flex Seal of Rocket NozzleDocument14 paginiHarmonic Analysis of Flex Seal of Rocket NozzlemadhumamayyaÎncă nu există evaluări
- Matecconf Icancee2019 01013Document8 paginiMatecconf Icancee2019 01013Anthony FuÎncă nu există evaluări
- Simulation and Analysis of Suspension System of Formula-1 Vehicle Under Dynamic Conditions by Using CAD ToolsDocument7 paginiSimulation and Analysis of Suspension System of Formula-1 Vehicle Under Dynamic Conditions by Using CAD ToolsSammmÎncă nu există evaluări
- Paper 7Document9 paginiPaper 7RakeshconclaveÎncă nu există evaluări
- Fiber Reinforced Plastics VesselsDocument5 paginiFiber Reinforced Plastics VesselsandreshuelvaÎncă nu există evaluări
- Technical Specifications For The Successful Fabrication of Laminated Seismic Isolation BearingsDocument11 paginiTechnical Specifications For The Successful Fabrication of Laminated Seismic Isolation BearingsTommy HeydemansÎncă nu există evaluări
- Design and Analysis of Lightweight Composite Chassis Frame For Army Light Vehicle Toyota Hzj79Document10 paginiDesign and Analysis of Lightweight Composite Chassis Frame For Army Light Vehicle Toyota Hzj79fikregenatÎncă nu există evaluări
- HDRB 1Document24 paginiHDRB 1Shritej nirmalÎncă nu există evaluări
- Applications-Design of Buckling Restrained Braces in JapanDocument15 paginiApplications-Design of Buckling Restrained Braces in JapanOmarVargaÎncă nu există evaluări
- Critical Load of Slender Elastomeric Seismic IsolatorsDocument7 paginiCritical Load of Slender Elastomeric Seismic IsolatorsAhmad Basshofi HabiebÎncă nu există evaluări
- Behaviour of Circular Sandwich Panel Under Dynamic Loading: Amran - Al@fkm - Utm.myDocument16 paginiBehaviour of Circular Sandwich Panel Under Dynamic Loading: Amran - Al@fkm - Utm.myyasameenÎncă nu există evaluări
- Ijciet 09 08 005Document7 paginiIjciet 09 08 005Mykkwong WongÎncă nu există evaluări
- Proiect ConstructiiDocument7 paginiProiect ConstructiiAsofii CosminaÎncă nu există evaluări
- Design and Manufacture of Hybrid Polymer Concrete BedDocument9 paginiDesign and Manufacture of Hybrid Polymer Concrete Bedsakthistory1922Încă nu există evaluări
- Ozdekan Seismic IsolatorDocument20 paginiOzdekan Seismic Isolatorali babaÎncă nu există evaluări
- Rubber Isolator 1921Document10 paginiRubber Isolator 1921Mario Daniel MLÎncă nu există evaluări
- 30 304NDocument5 pagini30 304NJason SamuelÎncă nu există evaluări
- Characterization and Modeling of Engineering Friction and Wear With Ls DynaDocument10 paginiCharacterization and Modeling of Engineering Friction and Wear With Ls DynaArun Kumar YadavÎncă nu există evaluări
- ° Technical University of LodzDocument22 pagini° Technical University of LodzLTE002Încă nu există evaluări
- Shot Crete 2005Document5 paginiShot Crete 2005Anonymous UebIaD8A8CÎncă nu există evaluări
- Numerical Analysis of Rubber Assisted Sheet Hydro-Forming Process and Its Experimental VerificationDocument10 paginiNumerical Analysis of Rubber Assisted Sheet Hydro-Forming Process and Its Experimental VerificationTJPRC PublicationsÎncă nu există evaluări
- Effect of Steel Fiber and Glass Fiber On Mechanical Properties of ConcreteDocument6 paginiEffect of Steel Fiber and Glass Fiber On Mechanical Properties of ConcreteIJSTEÎncă nu există evaluări
- COB-2019-0527 Linear Elastic Fracture Mechanics Analysis of A Square Hollow Structural Steel Section ProfileDocument9 paginiCOB-2019-0527 Linear Elastic Fracture Mechanics Analysis of A Square Hollow Structural Steel Section ProfileAlbert AlmeidaÎncă nu există evaluări
- Damage Initiation Mechanism in Rubber Sheet Composites During The Static LoadingDocument8 paginiDamage Initiation Mechanism in Rubber Sheet Composites During The Static LoadingMa RcoÎncă nu există evaluări
- Roll Bonding Properties of Al/Cu Bimetallic Laminates Fabricated by The Roll Bonding TechniqueDocument10 paginiRoll Bonding Properties of Al/Cu Bimetallic Laminates Fabricated by The Roll Bonding Techniqueamalendu_biswas_1Încă nu există evaluări
- Liu 2018Document13 paginiLiu 2018AHMED WALIDÎncă nu există evaluări
- CD Shaft GhatageDocument11 paginiCD Shaft GhatageMatthew SmithÎncă nu există evaluări
- Fracture Mechanics Analysis of CoatingDocument12 paginiFracture Mechanics Analysis of CoatingBisma MasoodÎncă nu există evaluări
- Static and Fatigue Behaviour of Hexagonal Honeycomb Cores Under In-Plane Shear LoadsDocument19 paginiStatic and Fatigue Behaviour of Hexagonal Honeycomb Cores Under In-Plane Shear LoadsAnto PellisseryÎncă nu există evaluări
- 10.2478 - Cee 2023 0036Document8 pagini10.2478 - Cee 2023 0036ajayyadav24127Încă nu există evaluări
- Mechanical Behavior of Polypropylene-Based Honeycomb-Core Composite Sandwich StructuresDocument11 paginiMechanical Behavior of Polypropylene-Based Honeycomb-Core Composite Sandwich Structuresburak köseerÎncă nu există evaluări
- Vehicle Crash Can FEA Model Simulation and Validation With Experiment Data NLENG.2014.0030.R1Document19 paginiVehicle Crash Can FEA Model Simulation and Validation With Experiment Data NLENG.2014.0030.R1rrmerlin_2Încă nu există evaluări
- AMME - Volume 18 - Issue 18th International Conference On Applied Mechanics and Mechanical Engineering. - Pages 1-15Document15 paginiAMME - Volume 18 - Issue 18th International Conference On Applied Mechanics and Mechanical Engineering. - Pages 1-15Valentina DiamanteÎncă nu există evaluări
- Low-Temperature Mechanical Properties of Glass/epoxy LaminatesDocument9 paginiLow-Temperature Mechanical Properties of Glass/epoxy LaminatesbiondimiÎncă nu există evaluări
- Rolling Ressistance of Truck TireDocument8 paginiRolling Ressistance of Truck TiregdanonÎncă nu există evaluări
- A Study On Fatigue Durability of RC Slab With Metal-Grid Instead of Steel Re-BarDocument12 paginiA Study On Fatigue Durability of RC Slab With Metal-Grid Instead of Steel Re-BarTrầmLãngÎncă nu există evaluări
- Textile Reinforced Concrete - An Innovative & Sustainable Solution For Construction IndustryDocument59 paginiTextile Reinforced Concrete - An Innovative & Sustainable Solution For Construction IndustrymukundchandÎncă nu există evaluări
- Introduction of A New Type of Metal Foam (Metallic Bubble Wrap)Document5 paginiIntroduction of A New Type of Metal Foam (Metallic Bubble Wrap)mubarakÎncă nu există evaluări
- Crash Simulation and Development of Automotive Bumper Impact Beam Design For Weight ReductionDocument6 paginiCrash Simulation and Development of Automotive Bumper Impact Beam Design For Weight ReductionSahaya robin singh MÎncă nu există evaluări
- Extended Abstract 81571 PDFDocument10 paginiExtended Abstract 81571 PDFKalyude DiógenesÎncă nu există evaluări
- A Detailed Experimental Study On Chinese Lead Rubber BearingDocument9 paginiA Detailed Experimental Study On Chinese Lead Rubber BearingAndré MuñozÎncă nu există evaluări
- SeisanDocument368 paginiSeisancimasukÎncă nu există evaluări
- Chuyen Tu NhienDocument4 paginiChuyen Tu NhienHương GiangÎncă nu există evaluări
- of Final Year Project (2882) FinallDocument30 paginiof Final Year Project (2882) Finallbhattaraidipak101Încă nu există evaluări
- NCJ Apr 2011Document112 paginiNCJ Apr 2011techkasambaÎncă nu există evaluări
- Structural Investigation Report - Magellan's Cross ChurchDocument4 paginiStructural Investigation Report - Magellan's Cross Churchmark_torreonÎncă nu există evaluări
- Disaster Preparedness PlanDocument7 paginiDisaster Preparedness Planapi-339394795Încă nu există evaluări
- Unit 5: Sitcom: I Want To Go Someplace Different. Scene 1Document3 paginiUnit 5: Sitcom: I Want To Go Someplace Different. Scene 1Andoni EsquivelÎncă nu există evaluări
- Disaster ManagementDocument373 paginiDisaster ManagementPraveen KumarÎncă nu există evaluări
- RISA 3D SheetDocument3 paginiRISA 3D SheetMichiel van AmstelÎncă nu există evaluări
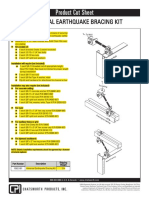
- Universal Earthquake Bracing Kit 10562-001Document1 paginăUniversal Earthquake Bracing Kit 10562-001Bernie AguilarÎncă nu există evaluări
- PCEE15 MNv2 Rev2Document9 paginiPCEE15 MNv2 Rev2Billy Joe BreakfastÎncă nu există evaluări
- RCC Dome Design - Concrete Design - Structural Engineering Forum of PakistanDocument7 paginiRCC Dome Design - Concrete Design - Structural Engineering Forum of PakistanMeghana JayaramÎncă nu există evaluări
- Northridge EarthquakeDocument1 paginăNorthridge EarthquakeNo NoÎncă nu există evaluări
- Codes of Seismic BuildingDocument29 paginiCodes of Seismic Buildingutkarsh pandeyÎncă nu există evaluări
- Tsunami FactsDocument13 paginiTsunami FactsIan Dante ArcangelesÎncă nu există evaluări
- Shear Wave Velocity As Function of SPT Penetration Resistance and Vertical Effective Stress at California Bridge SitesDocument80 paginiShear Wave Velocity As Function of SPT Penetration Resistance and Vertical Effective Stress at California Bridge SitesMarco SotoÎncă nu există evaluări
- Loads On StructuresDocument11 paginiLoads On Structuresmoy092Încă nu există evaluări
- Load Distribution in Bird's Nest StadiumDocument34 paginiLoad Distribution in Bird's Nest StadiumZorawar Singh Basur0% (1)
- Assignment 1Document6 paginiAssignment 1dmitra20% (1)
- 2 Dolphin Design With STAD PRODocument48 pagini2 Dolphin Design With STAD PROFachreza AkbarÎncă nu există evaluări
- Planetx Kolbrin PDFDocument97 paginiPlanetx Kolbrin PDFRubén Darío Mosconi Gaitán0% (1)
- Mineral Explorations and Engineering Geophysics Chapter 4Document18 paginiMineral Explorations and Engineering Geophysics Chapter 4Abhijit MukherjeeÎncă nu există evaluări
- Dpwhdesignguidelinescriteriastandards Volume6publicbuildingsotherrelatedstructures 1 91Document91 paginiDpwhdesignguidelinescriteriastandards Volume6publicbuildingsotherrelatedstructures 1 91Sine CosineÎncă nu există evaluări
- Design Standards No. 13 Embankment DamsDocument100 paginiDesign Standards No. 13 Embankment Damsjnf100% (3)
- Ncert Solutions For Class 8 March 31 Science Chapter 15 Some Natural PhenomenaDocument4 paginiNcert Solutions For Class 8 March 31 Science Chapter 15 Some Natural Phenomenashaktiman30000Încă nu există evaluări
- 10 Zhao Et Al - 2016Document36 pagini10 Zhao Et Al - 2016Jeremy VegaÎncă nu există evaluări
- Damage and Collapse Mechanisms in ChurchesDocument26 paginiDamage and Collapse Mechanisms in ChurchescarlodolciÎncă nu există evaluări
- Presentation Case Studies TaipeiDocument16 paginiPresentation Case Studies TaipeiBanoth Shankar ce19b005Încă nu există evaluări
- Riph - Chapter1 - The Philippine and Its PeopleDocument77 paginiRiph - Chapter1 - The Philippine and Its PeopleDawn Illaine ReclenasÎncă nu există evaluări