S-ar putea să vă placă și
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Saumya Mani Tripathi: Education SkillsDocument1 paginăSaumya Mani Tripathi: Education SkillsShivam Mani Tripathi x-c 11Încă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Ev Charging Station Based On Phc-Dab ConverterDocument28 paginiEv Charging Station Based On Phc-Dab ConverterAkshay SÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Debre Markos Institute of Technology (DMIT) School of Computing Software Engineering Academic Program Final Year Project TitleDocument5 paginiDebre Markos Institute of Technology (DMIT) School of Computing Software Engineering Academic Program Final Year Project TitleAwoke AdaneÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Robust Design of Ambient-Air Vaporizer Based On Time-Series ClusteringDocument13 paginiRobust Design of Ambient-Air Vaporizer Based On Time-Series ClusteringGilberto YoshidaÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- RT809F Programmer All Adapters LCD ReadeDocument5 paginiRT809F Programmer All Adapters LCD ReadeAlif Rizky ibadillahÎncă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Project Presentation: Inventory Management SystemDocument24 paginiProject Presentation: Inventory Management Systemdedarul100% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Guru Nanak College BudhladaDocument6 paginiGuru Nanak College BudhladaRohit MahajanÎncă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- An Introduction To Artificial Intelligence For Federal JudgesDocument102 paginiAn Introduction To Artificial Intelligence For Federal Judgescopias napolesÎncă nu există evaluări
- 130-00011-007 ISA-4000-series - User - ManualDocument24 pagini130-00011-007 ISA-4000-series - User - Manualjonginchoi99Încă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Semisel - Simulation SoftwareDocument2 paginiSemisel - Simulation Softwarenicolas antonio pallero fernandezÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- LogDocument26 paginiLogNuru MohammedÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Introduction To Hook Length Formula PDFDocument4 paginiIntroduction To Hook Length Formula PDFmichael scottÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Import Data From File Server: 1. Install Java Standard Edition Runtime Environment (JRE)Document32 paginiImport Data From File Server: 1. Install Java Standard Edition Runtime Environment (JRE)u_obiji2281Încă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Enable Hyper-V On Windows 10 - Microsoft DocsDocument3 paginiEnable Hyper-V On Windows 10 - Microsoft DocsDương Khởi ThạchÎncă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Study Guide ML Math PDFDocument4 paginiStudy Guide ML Math PDFjerryÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Coa SyllabusDocument11 paginiCoa SyllabusSaravana VelÎncă nu există evaluări
- Investigation of Physicians' Awareness and Use of Mhealth Apps: A Mixed Method StudyDocument19 paginiInvestigation of Physicians' Awareness and Use of Mhealth Apps: A Mixed Method StudyVandita KhudiaÎncă nu există evaluări
- Cobit 5Document3 paginiCobit 5Marco Putra WibawaÎncă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Electrical Control Valves EX4/EX5/EX6/EX7/EX8Document4 paginiElectrical Control Valves EX4/EX5/EX6/EX7/EX8محمد عليÎncă nu există evaluări
- Group 3 - SRM Project ReportDocument10 paginiGroup 3 - SRM Project ReportAkash IyappanÎncă nu există evaluări
- Esquema Elétrico Pci Principal: From TransDocument8 paginiEsquema Elétrico Pci Principal: From TransLuiz Clemente PimentaÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- BOQ 5400MT - Measurement.Document6 paginiBOQ 5400MT - Measurement.Danish JavedÎncă nu există evaluări
- JAP234 Handout 2Document4 paginiJAP234 Handout 2studentÎncă nu există evaluări
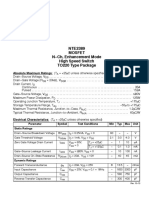
- NTE2389 Mosfet N CH, Enhancement Mode High Speed Switch TO220 Type PackageDocument2 paginiNTE2389 Mosfet N CH, Enhancement Mode High Speed Switch TO220 Type PackagetoroalÎncă nu există evaluări
- Assignment 1Document4 paginiAssignment 1FAGUN SONIÎncă nu există evaluări
- Sap Security and ControlsDocument19 paginiSap Security and Controlssandeep kumarÎncă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- DCNM - Wliion - Dicentis Battery PackDocument3 paginiDCNM - Wliion - Dicentis Battery PackAndrew Halim RamadanÎncă nu există evaluări
- Hearing Aid Amplification: Sandlin's Textbook ofDocument10 paginiHearing Aid Amplification: Sandlin's Textbook ofAmit SinghÎncă nu există evaluări
- The Use Of-Critical Path Modeling To Analyze Production in Underground MinesDocument15 paginiThe Use Of-Critical Path Modeling To Analyze Production in Underground MinesRENZO ANDRE GONZALES MALDONADOÎncă nu există evaluări
- ME F425 Additive ManufacturingDocument10 paginiME F425 Additive Manufacturingakash chÎncă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)