S-ar putea să vă placă și
- Simplificacion de Diagramas de BloquesDocument6 paginiSimplificacion de Diagramas de Bloquesalex carvajalÎncă nu există evaluări
- Taller 1Document5 paginiTaller 1JUAN SEBASTIAN OROZCO FISCHERÎncă nu există evaluări
- Lab11 de Circuitos IntegradosDocument5 paginiLab11 de Circuitos IntegradosRonald Bryan Caqui DurandÎncă nu există evaluări
- Controlado D T Por PidDocument7 paginiControlado D T Por PidPaúl García100% (1)
- 10 1109@andescon 2018 8564577Document3 pagini10 1109@andescon 2018 8564577david yandarÎncă nu există evaluări
- Calibrador VIGIADocument11 paginiCalibrador VIGIAPaul CarrilloÎncă nu există evaluări
- Sist - Control 01T ProyectoFinalDocument15 paginiSist - Control 01T ProyectoFinalMarcelo Saldarriaga Rivera100% (1)
- Informe Proyecto Final Instrumentaci N y Control Control PID para Un Sistema Ball and Beam 2 PDFDocument5 paginiInforme Proyecto Final Instrumentaci N y Control Control PID para Un Sistema Ball and Beam 2 PDFMiguel Angel GomezÎncă nu există evaluări
- Informe-Proyecto-Final Instrumentacion y Control PIDDocument5 paginiInforme-Proyecto-Final Instrumentacion y Control PIDMiguel Angel Gómez SánchezÎncă nu există evaluări
- Diego HernandezDocument11 paginiDiego Hernandezgonzalo medranoÎncă nu există evaluări
- Control PID de Temperarura (Analógico)Document6 paginiControl PID de Temperarura (Analógico)Rafael Aguilar RiosÎncă nu există evaluări
- Práctica 2Document7 paginiPráctica 2Alex EmilianoÎncă nu există evaluări
- Control PIDDocument11 paginiControl PIDRaúl MendozaÎncă nu există evaluări
- Lab - 1 - Control en CascadaDocument4 paginiLab - 1 - Control en CascadaFaracucho1Încă nu există evaluări
- Reporte de Control de Nivel Ruiz Ayala Adair 6MM8Document7 paginiReporte de Control de Nivel Ruiz Ayala Adair 6MM8Adair RuizÎncă nu există evaluări
- Control PID de Un HornoDocument4 paginiControl PID de Un HornoRodrigo Andres Heredia GarcésÎncă nu există evaluări
- Borrador 3 PenduloDocument14 paginiBorrador 3 PenduloManuel Blanco MendozaÎncă nu există evaluări
- AutoDocument13 paginiAutoElvis GarciaÎncă nu există evaluări
- Control de Posición de Balancín Con Motor y HéliceDocument9 paginiControl de Posición de Balancín Con Motor y HéliceGabriel AyalaÎncă nu există evaluări
- Termostato TraneDocument12 paginiTermostato TraneCarolina Lopez100% (2)
- Reporte PidDocument17 paginiReporte PidMackflay JCÎncă nu există evaluări
- Informe 6 Automatizacionpractica 6 UtpDocument3 paginiInforme 6 Automatizacionpractica 6 Utpjulitri21Încă nu există evaluări
- Cartel Proyecto BalancínDocument1 paginăCartel Proyecto BalancínUlises Román MurilloÎncă nu există evaluări
- Control Analogico de La Velocidad de Un Motor DCDocument7 paginiControl Analogico de La Velocidad de Un Motor DCFernando Patricio100% (1)
- ProyectoDocument13 paginiProyectoCrisGchÎncă nu există evaluări
- Laboratorio de ControlDocument11 paginiLaboratorio de Controldm mcÎncă nu există evaluări
- DDDDDocument13 paginiDDDDEduardo Arribasplata CernaÎncă nu există evaluări
- Articulo Control de Un Balancin Con Motor y HeliceDocument3 paginiArticulo Control de Un Balancin Con Motor y HeliceUlises Flores RefugioÎncă nu există evaluări
- Universidad Tecnológica de PueblaDocument12 paginiUniversidad Tecnológica de PueblaBebedmi Yviviras EternamenteÎncă nu există evaluări
- Cedillo Herrera Informe 4 PDFDocument4 paginiCedillo Herrera Informe 4 PDFDennis HerreraÎncă nu există evaluări
- Diseñar Sistema de Instrumentación - Fase 5 - Wilson AlvarezDocument18 paginiDiseñar Sistema de Instrumentación - Fase 5 - Wilson Alvarezandres perez100% (1)
- Practica PinoDocument12 paginiPractica PinoMichel Sánchez Colin100% (1)
- Informe Laboratorio 1 Análisis de Sistemas de ControlDocument3 paginiInforme Laboratorio 1 Análisis de Sistemas de ControlJulio Cesar Jimenez BautistaÎncă nu există evaluări
- Páginas de LB Delineacion5-Neumatica PDFDocument69 paginiPáginas de LB Delineacion5-Neumatica PDFDavidÎncă nu există evaluări
- Informe Practica2 Teoria de Control IIIDocument5 paginiInforme Practica2 Teoria de Control IIIalex carvajalÎncă nu există evaluări
- Practica - 4 Control en CasacadaDocument17 paginiPractica - 4 Control en CasacadaDaniel Garcia RosasÎncă nu există evaluări
- Auti 004 (Control Secuencia Con PLC) 2 - 19Document6 paginiAuti 004 (Control Secuencia Con PLC) 2 - 19Carlos Otalora AldanaÎncă nu există evaluări
- Informe 4 Laboratorio de Sistemas de Control Abrahamsz, BriceñoDocument11 paginiInforme 4 Laboratorio de Sistemas de Control Abrahamsz, BriceñoAlex o Drippyjeffrey, da igual.Încă nu există evaluări
- Control Pid Proyecto FinalDocument4 paginiControl Pid Proyecto Finaljesus daniel amaya vergaraÎncă nu există evaluări
- Trabajo Practico Sitema Barra BolaDocument15 paginiTrabajo Practico Sitema Barra BolaTato GalavernaÎncă nu există evaluări
- Informe Lab 6Document5 paginiInforme Lab 6Julen Daniel Caipa GarcésÎncă nu există evaluări
- Control PIDDocument15 paginiControl PIDRicardo RamirezÎncă nu există evaluări
- PS2383-Grupo 2 - Prelaboratorio 2Document11 paginiPS2383-Grupo 2 - Prelaboratorio 2Paola AlarconÎncă nu există evaluări
- Laboratorio #7-Sintonización de Un PIDDocument13 paginiLaboratorio #7-Sintonización de Un PIDMaicol AcostaÎncă nu există evaluări
- Informe Proyecto Seguidor de LineaDocument33 paginiInforme Proyecto Seguidor de LineaDavid Lema100% (1)
- Paper Ii 1Document4 paginiPaper Ii 1Hilton Mamani Zevallos0% (1)
- Protocolos Operacionales en WordDocument26 paginiProtocolos Operacionales en WordmishellÎncă nu există evaluări
- IMT9B ACTP4 Equipo6 CorrecciónDocument5 paginiIMT9B ACTP4 Equipo6 CorrecciónJoaquin MontalvoÎncă nu există evaluări
- Informe Proyecto Sistemas Grupo 2Document15 paginiInforme Proyecto Sistemas Grupo 2Joel GalindoÎncă nu există evaluări
- Taller de AutomatizaciónDocument20 paginiTaller de AutomatizaciónlhalexisÎncă nu există evaluări
- Pid de Control de TemperaturaDocument22 paginiPid de Control de TemperaturaJavier Mena50% (2)
- Trabajo Final de SistemasDocument16 paginiTrabajo Final de SistemasJairo HumaredaÎncă nu există evaluări
- Practica 2 Control de ProcesosDocument24 paginiPractica 2 Control de ProcesosDiego NegreteÎncă nu există evaluări
- Reporte Valvula EstranguladoraDocument4 paginiReporte Valvula EstranguladoraCarli17 LezcanoÎncă nu există evaluări
- Diseño e Implementación de Un Sistema de Control para Un Proceso SecuencialDocument3 paginiDiseño e Implementación de Un Sistema de Control para Un Proceso Secuencialjuan65321Încă nu există evaluări
- Trabajo 2 - Ingenieria - de - Control - Rzuñagua PDFDocument20 paginiTrabajo 2 - Ingenieria - de - Control - Rzuñagua PDFRoger Zuñagua SunturaÎncă nu există evaluări
- Diseño y Ajuste de Controladores PidDocument13 paginiDiseño y Ajuste de Controladores PidNABEÎncă nu există evaluări
- Manual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)De la EverandManual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)Evaluare: 2 din 5 stele2/5 (1)
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasDe la EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasEvaluare: 2.5 din 5 stele2.5/5 (3)
- Instrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108De la EverandInstrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108Încă nu există evaluări
- Investigacion 2Document3 paginiInvestigacion 2germaynne freireÎncă nu există evaluări
- Administración Proyectos, G1, Bustamante Joel, Freire Germain, Pasquel Dario, Medina Alexander, Morales Jean, 03 Noviembre 2020Document8 paginiAdministración Proyectos, G1, Bustamante Joel, Freire Germain, Pasquel Dario, Medina Alexander, Morales Jean, 03 Noviembre 2020germaynne freireÎncă nu există evaluări
- Competencia PerfectaDocument8 paginiCompetencia Perfectagermaynne freireÎncă nu există evaluări
- Gestion Empresarial 1, G2, Freire Germain, 31 Julio 2020Document5 paginiGestion Empresarial 1, G2, Freire Germain, 31 Julio 2020germaynne freireÎncă nu există evaluări
- Hidráulica SuelosDocument11 paginiHidráulica SuelosMiguel Oscar Rodriguez OvalleÎncă nu există evaluări
- Estudio Numérico Comparativo de La Conductividad Térmica Del Refrigerante R600A Con Nanopartículas de Al2O3 Y CuoDocument15 paginiEstudio Numérico Comparativo de La Conductividad Térmica Del Refrigerante R600A Con Nanopartículas de Al2O3 Y Cuogermaynne freireÎncă nu există evaluări
- Diseño de ColumnasDocument10 paginiDiseño de Columnasgermaynne freireÎncă nu există evaluări
- Gestion Empresarial 1 - G2 - FreireGermain - MoralesJean - 30marzo2020Document1 paginăGestion Empresarial 1 - G2 - FreireGermain - MoralesJean - 30marzo2020germaynne freireÎncă nu există evaluări
- Arbol de DecisionDocument6 paginiArbol de DecisionbryanÎncă nu există evaluări
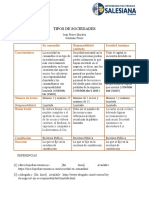
- Tipos de SociedadesDocument2 paginiTipos de Sociedadesgermaynne freireÎncă nu există evaluări
- Estados Del Arte 1Document12 paginiEstados Del Arte 1germaynne freireÎncă nu există evaluări
- Trabajo Elementos de PlanificaciónDocument2 paginiTrabajo Elementos de Planificacióngermaynne freireÎncă nu există evaluări
- Revistas de Energía RenovableDocument19 paginiRevistas de Energía Renovablegermaynne freireÎncă nu există evaluări
- Plantilla Revistas 10moDocument13 paginiPlantilla Revistas 10mogermaynne freireÎncă nu există evaluări
- Consulta Engranes Conicos SinfinDocument5 paginiConsulta Engranes Conicos Sinfingermaynne freireÎncă nu există evaluări
- Acero EstructuralDocument4 paginiAcero Estructuralgermaynne freireÎncă nu există evaluări
- Gestion Empresarial 1 - G2 - FreireGermainDocument1 paginăGestion Empresarial 1 - G2 - FreireGermaingermaynne freireÎncă nu există evaluări
- Resumen La Meta PDFDocument2 paginiResumen La Meta PDFgermaynne freireÎncă nu există evaluări
- Resumen Cap 2 PDFDocument4 paginiResumen Cap 2 PDFgermaynne freireÎncă nu există evaluări
- ChillerDocument3 paginiChillergermaynne freireÎncă nu există evaluări
- Resueltosalex2 PDFDocument7 paginiResueltosalex2 PDFjuanÎncă nu există evaluări
- Productos en DecadenciaDocument3 paginiProductos en Decadenciagermaynne freireÎncă nu există evaluări
- Estado Del Arte FREIREG EnergiasDocument1 paginăEstado Del Arte FREIREG Energiasgermaynne freireÎncă nu există evaluări
- LaboratorioDocument7 paginiLaboratorioJorge Luis CdnÎncă nu există evaluări
- Intercambiador de CalorDocument5 paginiIntercambiador de Calorgermaynne freireÎncă nu există evaluări
- Germain Harold Freire OsorioDocument3 paginiGermain Harold Freire Osoriogermaynne freireÎncă nu există evaluări
- CAPITULO III - AlumnosDocument62 paginiCAPITULO III - Alumnosgermaynne freire0% (1)
- Trabajo Clase55Document1 paginăTrabajo Clase55germaynne freireÎncă nu există evaluări
- Elementos TablasDocument13 paginiElementos TablasandresÎncă nu există evaluări
- Mejoramiento de Lineas de Tuberias de Bombeo de Sistema NV 1200 A NV 1000Document20 paginiMejoramiento de Lineas de Tuberias de Bombeo de Sistema NV 1200 A NV 1000CESAR HUAMANÎncă nu există evaluări
- Diapositivas Proyecto de GradoDocument12 paginiDiapositivas Proyecto de GradokekekekeÎncă nu există evaluări
- Ejc 3-189 Mantenimiento de Radio Prc-7330Document89 paginiEjc 3-189 Mantenimiento de Radio Prc-7330AlfredoBelloÎncă nu există evaluări
- Diseno DS60 Sesion1 LMassoneDocument50 paginiDiseno DS60 Sesion1 LMassonecquintanillaÎncă nu există evaluări
- Estudios Previos CHIPAQUEDocument13 paginiEstudios Previos CHIPAQUEAlvaro Stiven MORENO SALINASÎncă nu există evaluări
- Arbol de NeemDocument31 paginiArbol de NeemRosmel Chacon100% (1)
- 31-03-23 Informe Cumplimiento Acción Popular El Boliche - TránsitoDocument5 pagini31-03-23 Informe Cumplimiento Acción Popular El Boliche - TránsitoSISTEMAS DEINFORMACIONÎncă nu există evaluări
- Formulacion de ProyectosDocument16 paginiFormulacion de Proyectoseleazar jaureguiÎncă nu există evaluări
- Barlovento. de Los Orígenes A La IndependenciaDocument42 paginiBarlovento. de Los Orígenes A La IndependenciaMiguel ZavalaÎncă nu există evaluări
- Ventajas, Desventajas y Desafíos Del Buen Gobierno CorporativoDocument18 paginiVentajas, Desventajas y Desafíos Del Buen Gobierno CorporativoCésar Pedro Guerrero VillanuevaÎncă nu există evaluări
- Teoría de La MedidaDocument9 paginiTeoría de La Medidapaula0305Încă nu există evaluări
- Diseño y Proyectos Redes FO 3 (Elaboracion de Proyectos)Document51 paginiDiseño y Proyectos Redes FO 3 (Elaboracion de Proyectos)Raul Muñoz VenturaÎncă nu există evaluări
- Especificaciones TecnicasDocument208 paginiEspecificaciones TecnicasYoxs Mtk CharcaÎncă nu există evaluări
- Taquipnea Transitoria Del Recien NacidoDocument6 paginiTaquipnea Transitoria Del Recien NacidoMaria Cristina Limon Rueda0% (1)
- LEISHMANIASISDocument93 paginiLEISHMANIASISJOHANNA SANTANA100% (1)
- Modelo Informe EcografíaDocument2 paginiModelo Informe EcografíaSivik Ludwy100% (1)
- 8 Sin Marca de AguaDocument194 pagini8 Sin Marca de Aguaalexanderlopez504teletrabajoÎncă nu există evaluări
- Diferentes Tipos de Pastillas de FrenoDocument2 paginiDiferentes Tipos de Pastillas de FrenoEvelyn EspirituÎncă nu există evaluări
- Ejemplo SIPOCDocument5 paginiEjemplo SIPOCrobertoÎncă nu există evaluări
- Clase Excel para QuimicaDocument280 paginiClase Excel para QuimicaVíctor Jamett Labrín100% (2)
- BOCM 14 Agosto 2012Document322 paginiBOCM 14 Agosto 2012jlop12Încă nu există evaluări
- Contexto de La Organización ISO 9001 e ISO 14001Document8 paginiContexto de La Organización ISO 9001 e ISO 14001Andres NicolasÎncă nu există evaluări
- Iq2009 0002 0002Document150 paginiIq2009 0002 0002EfrainFelicesQuichcaÎncă nu există evaluări
- Manual Generador DFD22Document3 paginiManual Generador DFD22Manuel CornejoÎncă nu există evaluări
- Guía #15, Grado Jardin.Document12 paginiGuía #15, Grado Jardin.Mirian BuelvasÎncă nu există evaluări
- Metodos de EvaluacionDocument2 paginiMetodos de EvaluacionKrishna del ValleÎncă nu există evaluări
- Seleccion TurbinasDocument54 paginiSeleccion TurbinasAnonymous CgFsILbeaÎncă nu există evaluări
- Act. 4.3.2 IE - GARCIA CHI ROSA IMELDA - OptDocument20 paginiAct. 4.3.2 IE - GARCIA CHI ROSA IMELDA - OptRosa Imelda García ChiÎncă nu există evaluări
- IVA ProporcionDocument35 paginiIVA Proporcionluis estradaÎncă nu există evaluări
- Reglas Que Se Ejercen Sobre La Unidad QuirúrgicaDocument3 paginiReglas Que Se Ejercen Sobre La Unidad QuirúrgicaRoberto CastañedaÎncă nu există evaluări