S-ar putea să vă placă și
- Practical Power System and Protective Relays CommissioningDe la EverandPractical Power System and Protective Relays CommissioningEvaluare: 4.5 din 5 stele4.5/5 (10)
- Elng 417 Power System ProtectionDocument112 paginiElng 417 Power System ProtectionQuophi Click Lyftted100% (1)
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsDe la EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsEvaluare: 3.5 din 5 stele3.5/5 (3)
- Abc of Power Modules: Functionality, Structure and Handling of a Power ModuleDe la EverandAbc of Power Modules: Functionality, Structure and Handling of a Power ModuleÎncă nu există evaluări
- Introduction to Power System ProtectionDe la EverandIntroduction to Power System ProtectionEvaluare: 5 din 5 stele5/5 (1)
- Tumetic Tunorma Oil o PDFDocument8 paginiTumetic Tunorma Oil o PDFtduskoÎncă nu există evaluări
- Hum Noise Reduction V1Document10 paginiHum Noise Reduction V1Giulio CesareÎncă nu există evaluări
- A Project ON Automatic House-Hold Power Saving Device: Mr. Suman AdhikaryDocument49 paginiA Project ON Automatic House-Hold Power Saving Device: Mr. Suman AdhikaryjoyÎncă nu există evaluări
- GR8 PDFDocument31 paginiGR8 PDFgiramach getahunÎncă nu există evaluări
- Seminar Report 025Document40 paginiSeminar Report 025Kuri JabbaÎncă nu există evaluări
- REPORTDocument33 paginiREPORTAbinÎncă nu există evaluări
- Final Project ReportDocument53 paginiFinal Project ReportGokul KrishnaÎncă nu există evaluări
- Table of Contents Test RunDocument52 paginiTable of Contents Test RunTEMIDAYOÎncă nu există evaluări
- Design of Electrical Power Supply SystemDocument70 paginiDesign of Electrical Power Supply Systemgirma tsegayeÎncă nu există evaluări
- 2015 BT Detection SethiDocument57 pagini2015 BT Detection SethinikhilÎncă nu există evaluări
- Design and Construction of A Micro Controller Based Three Phase Sequence Checker-1Document47 paginiDesign and Construction of A Micro Controller Based Three Phase Sequence Checker-1Seth Duodu BrakoÎncă nu există evaluări
- Shortcircuit Calculation and Protection Selectivity Analysis For Turkey Eti ProjectDocument31 paginiShortcircuit Calculation and Protection Selectivity Analysis For Turkey Eti Projectmusa uçanÎncă nu există evaluări
- PSB Final ReportDocument32 paginiPSB Final Reportaamir.faiazÎncă nu există evaluări
- Microcontroller Based ProjectDocument31 paginiMicrocontroller Based ProjectshashankfruÎncă nu există evaluări
- Buck Converter Full ProjectDocument38 paginiBuck Converter Full Project2k18-EE-243 Vethushan VinnayagamoorththiÎncă nu există evaluări
- Project ReportDocument78 paginiProject Reporthr. infotechnogenplÎncă nu există evaluări
- Power System-2Document19 paginiPower System-2Vikram SinghÎncă nu există evaluări
- Testing Requirements For Microprocessor RelaysDocument36 paginiTesting Requirements For Microprocessor Relayssaka018891Încă nu există evaluări
- Design and Testing of ZVS Buck Converter ThirumaleshDocument50 paginiDesign and Testing of ZVS Buck Converter ThirumaleshThirumalesh Hadapada SreenivasaÎncă nu există evaluări
- Smart Grid Seminar ReportDocument38 paginiSmart Grid Seminar ReportKarishma RajuÎncă nu există evaluări
- Static Var CompenstorDocument57 paginiStatic Var Compenstorcarlos.figueiredoÎncă nu există evaluări
- Diploma in Electrical Engineering First Projecct ReportDocument11 paginiDiploma in Electrical Engineering First Projecct Reportdt1419778Încă nu există evaluări
- Null 5Document23 paginiNull 5Sergio DolmusÎncă nu există evaluări
- Single Phase Single Switch AC-AC Voltage Controller With Improved Input Power FactorDocument74 paginiSingle Phase Single Switch AC-AC Voltage Controller With Improved Input Power FactorApurbo BiswasÎncă nu există evaluări
- Diploma in Electrical Engineering First Projecct ReportDocument11 paginiDiploma in Electrical Engineering First Projecct Reportdt1419778Încă nu există evaluări
- Boost ConverterDocument38 paginiBoost ConverterVishnu AjithÎncă nu există evaluări
- Relays Effect Statcom - Static Synchronous CompensatorDocument120 paginiRelays Effect Statcom - Static Synchronous Compensatorraghuperumalla100% (7)
- 400 220kv Substation Traning Report DuraDocument101 pagini400 220kv Substation Traning Report DuraSumanto HembramÎncă nu există evaluări
- Meegahapola L. Hybrid AC-DC Power Grids. Stability..Control 2022Document285 paginiMeegahapola L. Hybrid AC-DC Power Grids. Stability..Control 2022GomolemoGumzNtlailaneÎncă nu există evaluări
- BhaskarDocument73 paginiBhaskarVivek AnnepuÎncă nu există evaluări
- Gajendra ReportDocument69 paginiGajendra ReportGajendra TeliÎncă nu există evaluări
- Technical ReportDocument50 paginiTechnical ReportTEMIDAYOÎncă nu există evaluări
- Effect of Thyristor Controlled Series Compensation On Distance ProtectionDocument47 paginiEffect of Thyristor Controlled Series Compensation On Distance ProtectionBitaniya BefikaduÎncă nu există evaluări
- Load Frequency Control of Power SystemDocument54 paginiLoad Frequency Control of Power SystemMahendraÎncă nu există evaluări
- Design of Pulse Width Modulator Using Ne-555: November 2020Document29 paginiDesign of Pulse Width Modulator Using Ne-555: November 2020Abdullah ParvezÎncă nu există evaluări
- Inverter and BLDC ProjectDocument19 paginiInverter and BLDC ProjectArjun MathiasÎncă nu există evaluări
- CERTS Microgrid Demonstration With Large-Scale Energy Storage and Renewable GenerationDocument41 paginiCERTS Microgrid Demonstration With Large-Scale Energy Storage and Renewable GenerationKarishma RajuÎncă nu există evaluări
- 21ee3101-Control Systems - Lab Skill Workbook - FinalDocument46 pagini21ee3101-Control Systems - Lab Skill Workbook - FinalmohansaikrnaÎncă nu există evaluări
- Power Electronics TextDocument460 paginiPower Electronics TextSindhu BijjalÎncă nu există evaluări
- Trade Project-Automatic Car Park Lights EditingDocument33 paginiTrade Project-Automatic Car Park Lights EditingSmartinz KarurizÎncă nu există evaluări
- Analysis of Cascaded H-Bridge Multilevel Inverter In: DTC-SVM Induction Motor Drive For FCEVDocument28 paginiAnalysis of Cascaded H-Bridge Multilevel Inverter In: DTC-SVM Induction Motor Drive For FCEVObsa TesemaÎncă nu există evaluări
- Ramnarayan BookDocument460 paginiRamnarayan Bookhemanth2143Încă nu există evaluări
- SmpcbookDocument460 paginiSmpcbookBiswajit SarkarÎncă nu există evaluări
- Especificacion Pdvsa k-334Document25 paginiEspecificacion Pdvsa k-334Hilda Lopez100% (1)
- Conductivity AnalyzerDocument38 paginiConductivity AnalyzerJean Loto Ssl100% (2)
- Summer Internship ReportDocument14 paginiSummer Internship Reportlive life with PeggyÎncă nu există evaluări
- Report FinalDocument29 paginiReport FinalSagar ChavanÎncă nu există evaluări
- HV Reference Manual V2 May 2011Document101 paginiHV Reference Manual V2 May 2011NouredineÎncă nu există evaluări
- A High Frequency High Efficiency High Power Factor Isolated OnDocument109 paginiA High Frequency High Efficiency High Power Factor Isolated OnSanyog Jayant PohareÎncă nu există evaluări
- Simulation of Power Electronics Converters Using PLECS®De la EverandSimulation of Power Electronics Converters Using PLECS®Încă nu există evaluări
- Embedded Mechatronic Systems 2: Analysis of Failures, Modeling, Simulation and OptimizationDe la EverandEmbedded Mechatronic Systems 2: Analysis of Failures, Modeling, Simulation and OptimizationÎncă nu există evaluări
- Protection of Substation Critical Equipment Against Intentional Electromagnetic ThreatsDe la EverandProtection of Substation Critical Equipment Against Intentional Electromagnetic ThreatsÎncă nu există evaluări
- Protection Principle and Technology of the VSC-Based DC GridDe la EverandProtection Principle and Technology of the VSC-Based DC GridÎncă nu există evaluări
- 2 PBDocument5 pagini2 PBwilliam MusapelalanÎncă nu există evaluări
- Power Electronics Lab ManualDocument6 paginiPower Electronics Lab ManualsathyasonyÎncă nu există evaluări
- Busbar Protection Busbar Differential Protection SchemeDocument9 paginiBusbar Protection Busbar Differential Protection SchemeGourav KumarÎncă nu există evaluări
- 18s266-Pr-Vp-2000-Po006-10007 Coupler-1 S2100115-06Document34 pagini18s266-Pr-Vp-2000-Po006-10007 Coupler-1 S2100115-06Alia RedhaÎncă nu există evaluări
- 325A Dual-Feed Circuit Breaker PanelDocument3 pagini325A Dual-Feed Circuit Breaker Panelm3y54mÎncă nu există evaluări
- Taikai Switchgear PPTDocument25 paginiTaikai Switchgear PPTAlauddin KhanÎncă nu există evaluări
- 624 JGS-NL-electric Wiring Diagram PDFDocument617 pagini624 JGS-NL-electric Wiring Diagram PDFPopa MihaiÎncă nu există evaluări
- Pilot Wire ProtectionDocument18 paginiPilot Wire ProtectionDheen Meeran100% (3)
- NBC207Document18 paginiNBC207Veronica SandersÎncă nu există evaluări
- Internship Report: Habak Grid Station 132/33 KV 120 MVA CapacityDocument25 paginiInternship Report: Habak Grid Station 132/33 KV 120 MVA Capacityrepisol729Încă nu există evaluări
- 03 Chapter 4 Diode Application DELGDocument31 pagini03 Chapter 4 Diode Application DELGaniq.halmyÎncă nu există evaluări
- Part 7 - High Voltage Safety RulesDocument8 paginiPart 7 - High Voltage Safety RuleswilisÎncă nu există evaluări
- Protection of Power TransformersDocument8 paginiProtection of Power TransformersEko Parjono100% (1)
- Is 2026 - 3Document44 paginiIs 2026 - 3Gaurav Agarwal100% (1)
- Motor Starting Problem and High Motor Inrush CurrentsDocument3 paginiMotor Starting Problem and High Motor Inrush CurrentsEdison EstrellaÎncă nu există evaluări
- 2CLG 15KV 0.5A High Voltage High Frequency - GoogDocument1 pagină2CLG 15KV 0.5A High Voltage High Frequency - Googal hurtadoÎncă nu există evaluări
- Testing SANS 10142 1 Edition 3Document7 paginiTesting SANS 10142 1 Edition 3lootÎncă nu există evaluări
- Current Balance Relays: InstructionsDocument12 paginiCurrent Balance Relays: InstructionsEvglazÎncă nu există evaluări
- Siement GCBDocument28 paginiSiement GCBsumpeno enoÎncă nu există evaluări
- A. Station Pump Quantity Unit Price CostDocument10 paginiA. Station Pump Quantity Unit Price CostquletjavierÎncă nu există evaluări
- Lightening Protection Using: Lfa-MDocument14 paginiLightening Protection Using: Lfa-MDev KumarÎncă nu există evaluări
- Industrial Low Voltage Cables: Construction: ResistanceDocument2 paginiIndustrial Low Voltage Cables: Construction: ResistanceFer F. Rodriguez CÎncă nu există evaluări
- Jonelc Indutrial Complex SCVDDocument17 paginiJonelc Indutrial Complex SCVDCarl Patrick PondivillaÎncă nu există evaluări
- Generator TrainingDocument44 paginiGenerator TrainingrahulNrana100% (1)
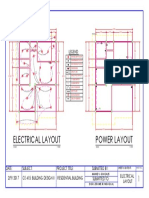
- Electrical Layout Power Layout: LegendDocument1 paginăElectrical Layout Power Layout: LegendSasheen Dela Cruz100% (1)
- 010 OktoberDocument36 pagini010 OktoberTri ananda putraÎncă nu există evaluări
- Das2 Revisions 1Document1 paginăDas2 Revisions 1marlon habonÎncă nu există evaluări
- SLD - Fan Starters From EMDB02Document1 paginăSLD - Fan Starters From EMDB02shrikanth5singhÎncă nu există evaluări