S-ar putea să vă placă și
- Elevator Troubleshooting & Repair: A Technician's Certification Study GuideDe la EverandElevator Troubleshooting & Repair: A Technician's Certification Study GuideEvaluare: 4 din 5 stele4/5 (9)
- Electric Motor Control: DC, AC, and BLDC MotorsDe la EverandElectric Motor Control: DC, AC, and BLDC MotorsEvaluare: 4.5 din 5 stele4.5/5 (19)
- Electronic Motors Part I - Brushless D.C. MotorsDocument12 paginiElectronic Motors Part I - Brushless D.C. MotorsRaldge AÎncă nu există evaluări
- Electric BrakingDocument28 paginiElectric BrakingSabir BanvaÎncă nu există evaluări
- Universal Motor 28th Apr 2020Document5 paginiUniversal Motor 28th Apr 2020Sourav KumarÎncă nu există evaluări
- Electric Motor Maintenance and Troubleshooting, 2nd EditionDe la EverandElectric Motor Maintenance and Troubleshooting, 2nd EditionEvaluare: 3 din 5 stele3/5 (2)
- Which Motor Has High Starting Torque and Staring Current DC Motor, Induction Motor or Synchronous Motor?Document26 paginiWhich Motor Has High Starting Torque and Staring Current DC Motor, Induction Motor or Synchronous Motor?NavdeepÎncă nu există evaluări
- Buyers Guide To Electronic MotorsDocument4 paginiBuyers Guide To Electronic MotorsJuci frootÎncă nu există evaluări
- DC Motor DrivesDocument11 paginiDC Motor DrivesVikram NikhilÎncă nu există evaluări
- Industrial Drive Unit 1Document24 paginiIndustrial Drive Unit 1Nilanjan PodderÎncă nu există evaluări
- Motorola Application NotesDocument10 paginiMotorola Application Notesvasudeva yasasÎncă nu există evaluări
- BDLC MotorDocument8 paginiBDLC MotorArun VijayÎncă nu există evaluări
- Construction and Working of Brushless DC PDFDocument12 paginiConstruction and Working of Brushless DC PDFaswardi8756Încă nu există evaluări
- ED1000Document4 paginiED1000Mohamed TahounÎncă nu există evaluări
- DC and AC Motor ControlDocument6 paginiDC and AC Motor Controldes tosÎncă nu există evaluări
- Induction Motor Braking Regenerative Plugging Dynamic Braking of Induction MotorDocument9 paginiInduction Motor Braking Regenerative Plugging Dynamic Braking of Induction MotorRajeev ValunjkarÎncă nu există evaluări
- Topic: DC Motor Using Mechanical Application: New Era University College of Engineering and TechnologyDocument13 paginiTopic: DC Motor Using Mechanical Application: New Era University College of Engineering and TechnologyMAr Lon Dela CruzÎncă nu există evaluări
- Hercules M. Biacoraelectrical-MachinesDocument8 paginiHercules M. Biacoraelectrical-MachinesBiacora Manalo HerculesÎncă nu există evaluări
- Types of MotorsDocument12 paginiTypes of MotorsMatin Inamdar100% (1)
- Discovery of BLDC Motor: Brushless vs. Brushed DC MotorDocument9 paginiDiscovery of BLDC Motor: Brushless vs. Brushed DC MotorNoni MaheshwariÎncă nu există evaluări
- Induction Motor Braking Regenerative Dynamic Braking of Induction Motor - Electrical4u PDFDocument7 paginiInduction Motor Braking Regenerative Dynamic Braking of Induction Motor - Electrical4u PDFbalajiÎncă nu există evaluări
- 3-Phase Ac Motor Monitoring and Parameter Calculation Using Labview and DaqDocument13 pagini3-Phase Ac Motor Monitoring and Parameter Calculation Using Labview and DaqInternational Journal of computational Engineering research (IJCER)Încă nu există evaluări
- Project On DC MotorDocument18 paginiProject On DC MotorSourav Deb RoyÎncă nu există evaluări
- Motor Soft StarterDocument4 paginiMotor Soft Starteralfredo_fredo_1Încă nu există evaluări
- Aman Powertrainev ElectricalDocument12 paginiAman Powertrainev Electricalsebecay203Încă nu există evaluări
- How Much Watts Solar Panel We Need For Our Home Electrical Appliances?Document6 paginiHow Much Watts Solar Panel We Need For Our Home Electrical Appliances?SovanÎncă nu există evaluări
- Electric MotorsDocument13 paginiElectric MotorsCholan PillaiÎncă nu există evaluări
- DC Drive ExplainationDocument17 paginiDC Drive ExplainationTabassum BanoÎncă nu există evaluări
- What Is A Compound DC MotorDocument8 paginiWhat Is A Compound DC MotorIan Rafael DeGuzman ReyesÎncă nu există evaluări
- 4.1 DC Motor SpecificationDocument6 pagini4.1 DC Motor SpecificationAsgher KhattakÎncă nu există evaluări
- Advantages and Disadvantages of DC MotorDocument6 paginiAdvantages and Disadvantages of DC MotorMuhd Izwan Ikhmal RosliÎncă nu există evaluări
- AC Motor, Servo Motor and Stepper MotorDocument12 paginiAC Motor, Servo Motor and Stepper MotorAhmedSayedÎncă nu există evaluări
- DC Motors InformationDocument9 paginiDC Motors InformationCarlosÎncă nu există evaluări
- DriveMotorBasics01 PDFDocument11 paginiDriveMotorBasics01 PDFSundar Kumar Vasantha GovindarajuluÎncă nu există evaluări
- What Is DC MotorDocument38 paginiWhat Is DC Motoralvin dalumpinesÎncă nu există evaluări
- Research Paper On DC Motor ControlDocument8 paginiResearch Paper On DC Motor Controlfvgjcq6aÎncă nu există evaluări
- DC Motor Speed System Modeling (Final Report)Document41 paginiDC Motor Speed System Modeling (Final Report)Khubaib Ahmed80% (5)
- IDS NewDocument128 paginiIDS NewShahbaz Ali100% (1)
- All Types of Motors Used in Electric TractionDocument3 paginiAll Types of Motors Used in Electric TractionMöstafa MohamedÎncă nu există evaluări
- EV Motors & DriversDocument10 paginiEV Motors & DriversSasindu GayanthaÎncă nu există evaluări
- AC Induction Motor SlipDocument6 paginiAC Induction Motor SlipnotastudentÎncă nu există evaluări
- Axlr8R Formula Racing: E-Mail - Mobile. No. - 7503744381 E-Mail - Mobile. No. - 8587870908Document49 paginiAxlr8R Formula Racing: E-Mail - Mobile. No. - 7503744381 E-Mail - Mobile. No. - 8587870908mavrick_senÎncă nu există evaluări
- 3-Phase Ac Motor Monitoring and Parameter Calculation Using Labview and DaqDocument13 pagini3-Phase Ac Motor Monitoring and Parameter Calculation Using Labview and DaqahmetÎncă nu există evaluări
- Lab Rep 2Document5 paginiLab Rep 2Kent Orriele FadriquelÎncă nu există evaluări
- Induction and Synchronous Motor FundamentalsDocument10 paginiInduction and Synchronous Motor Fundamentalshozipek5599100% (1)
- Project PDFDocument43 paginiProject PDFtaddese bekele100% (6)
- Brushless and Brushed DC MotorsDocument27 paginiBrushless and Brushed DC MotorsMarc Jairro GajudoÎncă nu există evaluări
- Ac-Dc-Servomotor-Net NotesDocument9 paginiAc-Dc-Servomotor-Net NotesDINESHKUMAR SÎncă nu există evaluări
- Electrical BrakingDocument19 paginiElectrical BrakingAnilÎncă nu există evaluări
- Motor AppplicationDocument17 paginiMotor Appplicationtajul tonoyÎncă nu există evaluări
- Unit-3: (This Unit Covers Criteria P4, P5, P7, D2) Motor StartersDocument15 paginiUnit-3: (This Unit Covers Criteria P4, P5, P7, D2) Motor StartersMuhja AljaserÎncă nu există evaluări
- Electrial Machines Second ReportDocument7 paginiElectrial Machines Second ReportMohamed YahiaÎncă nu există evaluări
- What Is A Motor StarterDocument8 paginiWhat Is A Motor Starterhussein muyombyaÎncă nu există evaluări
- Kaizen - Motor Selection GuideDocument10 paginiKaizen - Motor Selection GuideKarrar HussainÎncă nu există evaluări
- Electrical Braking: of Braking But The Main Idea Behind Each Type of BarkingDocument5 paginiElectrical Braking: of Braking But The Main Idea Behind Each Type of BarkingsarvanÎncă nu există evaluări
- Drive: Electric MotorDocument18 paginiDrive: Electric Motorsunny112811Încă nu există evaluări
- AC Electric Motors Control: Advanced Design Techniques and ApplicationsDe la EverandAC Electric Motors Control: Advanced Design Techniques and ApplicationsFouad GiriÎncă nu există evaluări
- HareDocument1 paginăHaregeovany_villagraÎncă nu există evaluări
- HareDocument1 paginăHaregeovany_villagraÎncă nu există evaluări
- Engineering Guide Hvac and Refrigeration ApplicationsDocument64 paginiEngineering Guide Hvac and Refrigeration Applicationsgeovany_villagraÎncă nu există evaluări
- HareDocument1 paginăHaregeovany_villagraÎncă nu există evaluări
- 2008-11-14 Installation Manual - Multi V Mini Outdoor Unit - mfl46912306Document199 pagini2008-11-14 Installation Manual - Multi V Mini Outdoor Unit - mfl46912306geovany_villagraÎncă nu există evaluări
- Connecting LilyPad Arduino To LilyPad XbeeDocument9 paginiConnecting LilyPad Arduino To LilyPad Xbeegeovany_villagraÎncă nu există evaluări
- HFCC D Iom 03Document16 paginiHFCC D Iom 03geovany_villagraÎncă nu există evaluări
- Nailor Industries Inc., Air Distribution Catalog - Section I - Engineering GuideDocument1 paginăNailor Industries Inc., Air Distribution Catalog - Section I - Engineering Guidegeovany_villagraÎncă nu există evaluări
- ASHRAE Workshop Control SamHui Part 4Document2 paginiASHRAE Workshop Control SamHui Part 4geovany_villagraÎncă nu există evaluări
- Lennox CarbonClean16 Air-FilterDocument2 paginiLennox CarbonClean16 Air-Filtergeovany_villagraÎncă nu există evaluări
- Bacnet Wiring Guidelines PDFDocument12 paginiBacnet Wiring Guidelines PDFmarcalpi100% (1)
- ASHRAE Workshop Control SamHui Part 4Document53 paginiASHRAE Workshop Control SamHui Part 4Jyothsna MandavaÎncă nu există evaluări
- Isolation RoomsDocument67 paginiIsolation RoomsMichael WallaceÎncă nu există evaluări
- Labconco-7115900 Rev A Intelli-Sense Multi-Speed BlowersDocument58 paginiLabconco-7115900 Rev A Intelli-Sense Multi-Speed Blowersgeovany_villagraÎncă nu există evaluări
- CADIENDocument34 paginiCADIENGohdsÎncă nu există evaluări
- 2008-11-14 Installation Manual - Multi V Mini Outdoor Unit - mfl46912306Document199 pagini2008-11-14 Installation Manual - Multi V Mini Outdoor Unit - mfl46912306geovany_villagraÎncă nu există evaluări
- Galvanizing Note1Document7 paginiGalvanizing Note1pandey008Încă nu există evaluări
- Important: Common System Component WiringDocument1 paginăImportant: Common System Component Wiringgeovany_villagraÎncă nu există evaluări
- 6600 Sin PlenumDocument5 pagini6600 Sin Plenumgeovany_villagraÎncă nu există evaluări
- Ehb cbx32mv 1210Document3 paginiEhb cbx32mv 1210geovany_villagraÎncă nu există evaluări
- GRD EngineeringDocument16 paginiGRD Engineeringgeovany_villagraÎncă nu există evaluări
- A - 55 Louver InstallationDocument1 paginăA - 55 Louver Installationgeovany_villagraÎncă nu există evaluări
- Engineering Guide: Air DistributionDocument19 paginiEngineering Guide: Air Distributionksa_hishamÎncă nu există evaluări
- Ducts and Diffusers DesignDocument106 paginiDucts and Diffusers Designgeovany_villagraÎncă nu există evaluări
- Seminar ReportDocument31 paginiSeminar ReportPriyanshu KumarÎncă nu există evaluări
- Ship Assist and Escort Winches For Dynamic Seas The ARR Winch For Crowley Maritime Tug RESPONSEDocument15 paginiShip Assist and Escort Winches For Dynamic Seas The ARR Winch For Crowley Maritime Tug RESPONSEYao WeiÎncă nu există evaluări
- HA464518Document146 paginiHA464518Hayden Lovett100% (3)
- Motor Master 20000 SeriesDocument56 paginiMotor Master 20000 SeriesArnulfo Lavares100% (1)
- SD40-3 Schmetic PDFDocument66 paginiSD40-3 Schmetic PDFChristopher Ulrich Moussavou MbinaÎncă nu există evaluări
- AC BrakingDocument15 paginiAC BrakingAnonymous xaeuoo4Încă nu există evaluări
- Energy RegenerationDocument6 paginiEnergy RegenerationAvinash AcharyaÎncă nu există evaluări
- SINAMICS V20 Dynamic Braking Module 012014Document4 paginiSINAMICS V20 Dynamic Braking Module 012014Pedro GutmanÎncă nu există evaluări
- DEC Web Only FeatureDocument2 paginiDEC Web Only FeaturemohanÎncă nu există evaluări
- Summer Training Project ReportDocument22 paginiSummer Training Project ReportAnkit Sharma50% (2)
- Medha CatalogDocument56 paginiMedha CatalogOliver Guido Castro PintoÎncă nu există evaluări
- Speed Control of Three Phase Induction MotorDocument28 paginiSpeed Control of Three Phase Induction MotorRajeev Valunjkar100% (1)
- Danfoss VLT FC300 VLT Automation Drive DKDPB13C102Document16 paginiDanfoss VLT FC300 VLT Automation Drive DKDPB13C102hoor24332Încă nu există evaluări
- Elect 6 PDFDocument26 paginiElect 6 PDFsathyasri2011100% (1)
- Dynamic Braking Unit Sikes 2016 01Document8 paginiDynamic Braking Unit Sikes 2016 01Javier VasquezÎncă nu există evaluări
- SGDH SGDM List of AlarmcodesDocument18 paginiSGDH SGDM List of AlarmcodeserasmoÎncă nu există evaluări
- Railway Locomotive Inspection and Safety Rules - ENDocument28 paginiRailway Locomotive Inspection and Safety Rules - ENabdul rochimÎncă nu există evaluări
- Final Draft Tor For LRV Procurement.Document101 paginiFinal Draft Tor For LRV Procurement.FÎncă nu există evaluări
- GE C30-7 Operations ManualDocument43 paginiGE C30-7 Operations ManualJc RubinaÎncă nu există evaluări
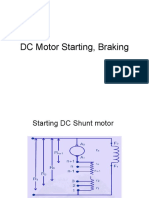
- DC Motor Starting, Braking Aug18Document25 paginiDC Motor Starting, Braking Aug18Ashwini Singh100% (1)
- SVX9000Document13 paginiSVX9000Biswadeep GhoshÎncă nu există evaluări
- Different Braking Techniques Employed To A Brushless DC Motor Drive Used in LocomotivesDocument7 paginiDifferent Braking Techniques Employed To A Brushless DC Motor Drive Used in LocomotivesKidus DawitÎncă nu există evaluări
- Unit 2 - EDDocument42 paginiUnit 2 - EDMohit L.E. 008Încă nu există evaluări
- Alarmas Omron SigmaII SGDHDocument3 paginiAlarmas Omron SigmaII SGDHDiego DiegoÎncă nu există evaluări
- (97c1efe3 Be1b 4bec 9308 D1d9eacf9024) PS20022 Thermal ManagementDocument2 pagini(97c1efe3 Be1b 4bec 9308 D1d9eacf9024) PS20022 Thermal ManagementJoseph JoseÎncă nu există evaluări
- Dynamic BrakingDocument3 paginiDynamic BrakingMikhael Glen LatazaÎncă nu există evaluări
- Train BrakingDocument14 paginiTrain BrakingVenkata RaoÎncă nu există evaluări
- Braking of DC MotorDocument18 paginiBraking of DC MotorBangariÎncă nu există evaluări
- M1 Series: SCR, Adjustable Speed Drives For DC Brush MotorsDocument52 paginiM1 Series: SCR, Adjustable Speed Drives For DC Brush MotorsRodolfo ArosemenaÎncă nu există evaluări
- Braking Resistor FormulaDocument72 paginiBraking Resistor FormulaAftandil QarmonÎncă nu există evaluări