S-ar putea să vă placă și
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- 1.4 SelectionDocument51 pagini1.4 SelectionKeerthi Vasan SÎncă nu există evaluări
- Fifo Depth Calculation Made EasyDocument8 paginiFifo Depth Calculation Made EasyGAURAV KUMARÎncă nu există evaluări
- Algorithms 3: CTPS 2018Document16 paginiAlgorithms 3: CTPS 2018Keerthi Vasan SÎncă nu există evaluări
- Candle Sticks: Support Level HammerDocument8 paginiCandle Sticks: Support Level HammerKeerthi Vasan SÎncă nu există evaluări
- A Tutorial On Pointers and Arrays in CDocument53 paginiA Tutorial On Pointers and Arrays in Cnaveen karthikeyan100% (10)
- 1.6 FunctionDocument49 pagini1.6 FunctionKeerthi Vasan SÎncă nu există evaluări
- 3.5B Enumeration: Department of CSEDocument9 pagini3.5B Enumeration: Department of CSEKeerthi Vasan SÎncă nu există evaluări
- 1.1 Introduction To CDocument57 pagini1.1 Introduction To CKeerthi Vasan SÎncă nu există evaluări
- Using If ElseDocument5 paginiUsing If ElseKeerthi Vasan SÎncă nu există evaluări
- Three-Phase Asymmetry and Phase-Sequence Phase-Loss Relay: K8Ab-PaDocument7 paginiThree-Phase Asymmetry and Phase-Sequence Phase-Loss Relay: K8Ab-PaKeerthi Vasan SÎncă nu există evaluări
- 1.3b Type ConversionDocument12 pagini1.3b Type ConversionKeerthi Vasan SÎncă nu există evaluări
- String ReverseDocument2 paginiString ReverseKeerthi Vasan SÎncă nu există evaluări
- 3.2 String FunctionsDocument20 pagini3.2 String FunctionsKeerthi Vasan SÎncă nu există evaluări
- Siemens Simatic Winac: RTX Customer OverviewDocument2 paginiSiemens Simatic Winac: RTX Customer OverviewKeerthi Vasan SÎncă nu există evaluări
- 1.7 RecursionDocument23 pagini1.7 RecursionKeerthi Vasan SÎncă nu există evaluări
- Embedded Systems Shape The WorldDocument8 paginiEmbedded Systems Shape The WorldGabriel UbaldoÎncă nu există evaluări
- Three-Phase Asymmetry and Phase-Sequence Phase-Loss Relay: K8Ab-PaDocument12 paginiThree-Phase Asymmetry and Phase-Sequence Phase-Loss Relay: K8Ab-PaKeerthi Vasan SÎncă nu există evaluări
- Three-Phase Asymmetry and Phase-Sequence Phase-Loss Relay: K8Ab-PaDocument7 paginiThree-Phase Asymmetry and Phase-Sequence Phase-Loss Relay: K8Ab-PaKeerthi Vasan SÎncă nu există evaluări
- Misra C 2004Document116 paginiMisra C 2004NeneFIÎncă nu există evaluări
- RM17TE00 DATASHEET NG en-GBDocument6 paginiRM17TE00 DATASHEET NG en-GBKeerthi Vasan SÎncă nu există evaluări
- 3.3 StructuresDocument24 pagini3.3 StructuresKeerthi Vasan SÎncă nu există evaluări
- Pointers and MemoryDocument31 paginiPointers and MemorySivasai KumarÎncă nu există evaluări
- 3.7 Command-Line ArgumentsDocument18 pagini3.7 Command-Line ArgumentsKeerthi Vasan SÎncă nu există evaluări
- String ReverseDocument2 paginiString ReverseKeerthi Vasan SÎncă nu există evaluări
- Transformerless R-C Power SupplyDocument4 paginiTransformerless R-C Power SupplyKeerthi Vasan SÎncă nu există evaluări
- ARM Interrupt HandlingDocument70 paginiARM Interrupt Handlingsaad06-52Încă nu există evaluări
- AC Current Measurements Using Hall-Effect Sensors - Engineer Experiences PDFDocument10 paginiAC Current Measurements Using Hall-Effect Sensors - Engineer Experiences PDFKeerthi Vasan SÎncă nu există evaluări
- Bitwise Operations in Embedded Programming - Detail ExplanationDocument6 paginiBitwise Operations in Embedded Programming - Detail ExplanationKeerthi Vasan SÎncă nu există evaluări
- EMI FilterDocument1 paginăEMI FilterKeerthi Vasan SÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- DTG2 Service Manual: Version 1.0 - 2013Document58 paginiDTG2 Service Manual: Version 1.0 - 2013Hector Soto CancinoÎncă nu există evaluări
- Mindray Beneheart D1 Pro AED BrochureDocument4 paginiMindray Beneheart D1 Pro AED BrochureBumi palapa Built UpÎncă nu există evaluări
- HRH - 05 May 1977Document84 paginiHRH - 05 May 1977Anonymous 60esBJZIjÎncă nu există evaluări
- Rexton RX 290-1 PDFDocument918 paginiRexton RX 290-1 PDFMassimo GambariÎncă nu există evaluări
- Eddycurrentsensor PCB SENSOR 2010Document8 paginiEddycurrentsensor PCB SENSOR 2010Siphesihle NkosiÎncă nu există evaluări
- GRD140 6F2S0758 1.1Document334 paginiGRD140 6F2S0758 1.1krishna mohanÎncă nu există evaluări
- Shindengen: Super Fast Recovery RectifiersDocument7 paginiShindengen: Super Fast Recovery Rectifiersjoroma58Încă nu există evaluări
- Mtn351An3: Cystech Electronics CorpDocument5 paginiMtn351An3: Cystech Electronics CorpStefania FerrarioÎncă nu există evaluări
- Model QP-02 08 FON PDFDocument26 paginiModel QP-02 08 FON PDFNanda KumarÎncă nu există evaluări
- Overvoltage Protection of Electric Vehicle (EV) Charging Infrastructures GloballyDocument8 paginiOvervoltage Protection of Electric Vehicle (EV) Charging Infrastructures GloballySatadal DashÎncă nu există evaluări
- AVR Microcontroller TestDocument9 paginiAVR Microcontroller TestNiranjan AgravatÎncă nu există evaluări
- 오픽노잼 AL 시리즈Document6 pagini오픽노잼 AL 시리즈jennieÎncă nu există evaluări
- US Patent: US7641611Document30 paginiUS Patent: US7641611Jason JerseyÎncă nu există evaluări
- Electrical Properties of Semiconductors PDFDocument2 paginiElectrical Properties of Semiconductors PDFApril Wilson100% (1)
- Course Specification: Se425 Distributed Control SystemDocument10 paginiCourse Specification: Se425 Distributed Control SystemAmmar AlkindyÎncă nu există evaluări
- Arcadis: Option Standard Monitor CarriageDocument38 paginiArcadis: Option Standard Monitor CarriageVlady Lopez CastroÎncă nu există evaluări
- Goyal2022 BiomimeticPhantomDocument9 paginiGoyal2022 BiomimeticPhantomflygirlsÎncă nu există evaluări
- GR00002800 00Document64 paginiGR00002800 00JBÎncă nu există evaluări
- Electrical Workshop - ExperimentsDocument7 paginiElectrical Workshop - ExperimentsMirza Bilal100% (1)
- Case Study 4: Sony's Business Strategy and It's FailureDocument4 paginiCase Study 4: Sony's Business Strategy and It's FailurexinyiÎncă nu există evaluări
- 497 500, Tesma503, IJEASTDocument4 pagini497 500, Tesma503, IJEASTLarry Nelson BorbaÎncă nu există evaluări
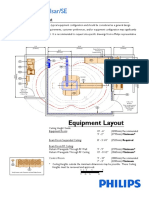
- Achieva 1.5T Pulsar SEDocument3 paginiAchieva 1.5T Pulsar SEISRAEL MATEOS GARCIA-SALAMANCAÎncă nu există evaluări
- Chapter 4 Diagnosis Technique - BRDocument32 paginiChapter 4 Diagnosis Technique - BRSadrina MahamudÎncă nu există evaluări
- Three Phase Inverter With Synergy Technology: SE50K / SE55K / SE82.8KDocument2 paginiThree Phase Inverter With Synergy Technology: SE50K / SE55K / SE82.8KLeeÎncă nu există evaluări
- DRSSTC Building The Modern Day Tesla Coil: Minibrute Reference DesignDocument23 paginiDRSSTC Building The Modern Day Tesla Coil: Minibrute Reference DesignGfsÎncă nu există evaluări
- Em-II Assignment-II (Sem-II) 21 22Document2 paginiEm-II Assignment-II (Sem-II) 21 22KSB GAMER PUBG LITEÎncă nu există evaluări
- Use of Multimeter Text EjerciciosDocument5 paginiUse of Multimeter Text EjerciciosWilliamÎncă nu există evaluări
- Product Information On The Reference Manual: 1 Position Decoder Module SM 338 POS-INPUT (6ES7338-4BC01-0AB0)Document18 paginiProduct Information On The Reference Manual: 1 Position Decoder Module SM 338 POS-INPUT (6ES7338-4BC01-0AB0)Deny Tirta KusumaÎncă nu există evaluări
- Dsa 007482Document14 paginiDsa 007482AmirÎncă nu există evaluări
- STS - (3000K, 6000K) - H1 Smart Transformer Station User ManualDocument145 paginiSTS - (3000K, 6000K) - H1 Smart Transformer Station User ManualAntonio CanalesÎncă nu există evaluări