S-ar putea să vă placă și
- Number CardsDocument21 paginiNumber CardsCachipún Lab CreativoÎncă nu există evaluări
- InterviewDocument8 paginiInterviewswapnadip kumbharÎncă nu există evaluări
- Per Dev Dlp-1-2 - 3 SelfDocument6 paginiPer Dev Dlp-1-2 - 3 SelfMonisa SocorinÎncă nu există evaluări
- Additive Manufacturing Methods and Modelling ApproachesDocument17 paginiAdditive Manufacturing Methods and Modelling ApproachesBianca EndoÎncă nu există evaluări
- BasysPrint Article UV-CTP Technology USDocument4 paginiBasysPrint Article UV-CTP Technology USIvor Sabadoš100% (1)
- Particle Analysis - ImageJ - Manual1Document5 paginiParticle Analysis - ImageJ - Manual1Anand aashishÎncă nu există evaluări
- Opp For 3D Printing MatlDocument13 paginiOpp For 3D Printing Matlbloodterry2284Încă nu există evaluări
- Carbopol MixingDocument3 paginiCarbopol MixingTom JerryÎncă nu există evaluări
- Progressive Muscle Relaxation ExerciseDocument2 paginiProgressive Muscle Relaxation Exerciseraghu2362704100% (1)
- Powering Laser Diode SystemsDocument134 paginiPowering Laser Diode SystemsNick100% (1)
- Lesson Exemplar Math 7Document6 paginiLesson Exemplar Math 7Pablo Jimenea100% (2)
- How To Use Image-JDocument198 paginiHow To Use Image-JHai Anh NguyenÎncă nu există evaluări
- Extreme Ultraviolet LithographyDocument35 paginiExtreme Ultraviolet LithographyDJ100% (1)
- 3d PrintingDocument36 pagini3d PrintingARJUN MPÎncă nu există evaluări
- 7 Families of 3d Printing by Hybrid v11 2pDocument2 pagini7 Families of 3d Printing by Hybrid v11 2pMarlon RiveraÎncă nu există evaluări
- Smart StructuresDocument19 paginiSmart Structuresxyz333447343Încă nu există evaluări
- Ze Max ManualDocument657 paginiZe Max ManualSeetanshu AwasthiÎncă nu există evaluări
- ImageJ User GuideDocument179 paginiImageJ User Guideawncy4471Încă nu există evaluări
- Image Enchancement in Spatial DomainDocument117 paginiImage Enchancement in Spatial DomainMalluri LokanathÎncă nu există evaluări
- 3D Bioprinting From The Micrometer To Millimete 2017 Current Opinion in BiomDocument7 pagini3D Bioprinting From The Micrometer To Millimete 2017 Current Opinion in Biomrrm77Încă nu există evaluări
- Three Dimensional Printing Basic PrinciplesDocument16 paginiThree Dimensional Printing Basic PrinciplesAndre Antonio Tamayo FernandeÎncă nu există evaluări
- Image Processing in MATLAB 9.3Document5 paginiImage Processing in MATLAB 9.3Editor IJTSRDÎncă nu există evaluări
- Image Denoising ReportDocument31 paginiImage Denoising Reportdeepak_abcÎncă nu există evaluări
- Image Analysis With MatlabDocument52 paginiImage Analysis With MatlabSaurabh Malik100% (1)
- FinalDocument19 paginiFinalvanitha nÎncă nu există evaluări
- Real Time Edge Detector of Objects Using MatlabDocument3 paginiReal Time Edge Detector of Objects Using MatlabJans HendryÎncă nu există evaluări
- Scaling Laws and Multiscale ManufacturingDocument32 paginiScaling Laws and Multiscale ManufacturingVikas Lakhmani100% (1)
- 5-Axis 3D Printer - The Latest Advancements - All3DPDocument12 pagini5-Axis 3D Printer - The Latest Advancements - All3DPHeart SoulÎncă nu există evaluări
- MC0086 Digital Image ProcessingDocument9 paginiMC0086 Digital Image ProcessingGaurav Singh JantwalÎncă nu există evaluări
- Whitepaper Laser-Tracker Hydro Jan09Document7 paginiWhitepaper Laser-Tracker Hydro Jan09Sagar PatkiÎncă nu există evaluări
- Fused Deposition Modeling (FDM)Document5 paginiFused Deposition Modeling (FDM)Ahsan Iftikhar100% (1)
- Lab2-Spectral Analysis in MatlabDocument14 paginiLab2-Spectral Analysis in MatlabindameantimeÎncă nu există evaluări
- What Is Spectroscopic EllipsometryDocument5 paginiWhat Is Spectroscopic EllipsometryCarlos HernandezÎncă nu există evaluări
- Boson Lens Calibration Application Note - R1.1Document23 paginiBoson Lens Calibration Application Note - R1.1hightechtalentÎncă nu există evaluări
- AMT Notes Unit-2Document27 paginiAMT Notes Unit-2Suddapally VIVEK ReddyÎncă nu există evaluări
- 3D Bioprinting of Human Transplant Organs - A Patent Landscape PDFDocument42 pagini3D Bioprinting of Human Transplant Organs - A Patent Landscape PDFNathaniel ZhuÎncă nu există evaluări
- Supporting Linux Without An MMU Class #407: D. Jeff DionneDocument3 paginiSupporting Linux Without An MMU Class #407: D. Jeff Dionnemelvin45Încă nu există evaluări
- Lab PhotolithographyDocument4 paginiLab PhotolithographyÉlanr_1Încă nu există evaluări
- OptiFDTD TutorialsDocument36 paginiOptiFDTD TutorialsDr-Mandeep SinghÎncă nu există evaluări
- Run Length Encoding and DecodingDocument3 paginiRun Length Encoding and DecodingDaniel SimanjuntakÎncă nu există evaluări
- Chapter 7 - Coordinate MetrologyDocument7 paginiChapter 7 - Coordinate MetrologyTanvir DaphedarÎncă nu există evaluări
- Types of Rapid PrototypingDocument65 paginiTypes of Rapid PrototypingNurhuda Hayati0% (1)
- 3d BioprintingDocument6 pagini3d Bioprintingapi-505366251Încă nu există evaluări
- Selective Laser MeltingDocument12 paginiSelective Laser MeltingAngry BirdÎncă nu există evaluări
- Ze Max ManualDocument657 paginiZe Max ManualMaricela DelgadilloÎncă nu există evaluări
- Centrífuga Centra GP8Document34 paginiCentrífuga Centra GP8gustavoesanchezÎncă nu există evaluări
- Ars Users GuideDocument176 paginiArs Users Guideminardmi0% (1)
- The Matlab NMR LibraryDocument34 paginiThe Matlab NMR Librarysukanya_13Încă nu există evaluări
- Report On 3D PrinterDocument50 paginiReport On 3D PrinterYuvraj MarneÎncă nu există evaluări
- Fused Deposition ModelingDocument2 paginiFused Deposition ModelingDharshan KofiÎncă nu există evaluări
- Report 3d Scanner Bongkahan PantatDocument46 paginiReport 3d Scanner Bongkahan PantatBang JayÎncă nu există evaluări
- European Xfel TDRDocument646 paginiEuropean Xfel TDRchubatronÎncă nu există evaluări
- Rapid Prototyping Lesson PlanDocument4 paginiRapid Prototyping Lesson PlanRajyalakshmi MÎncă nu există evaluări
- Semiconductor Model Library ManualDocument88 paginiSemiconductor Model Library ManualSneha S Revankar100% (1)
- 3D Printing SeminarDocument19 pagini3D Printing SeminarManoj gowda kÎncă nu există evaluări
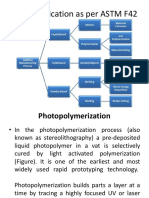
- AM Classification As Per ASTM F42Document19 paginiAM Classification As Per ASTM F42RajijackÎncă nu există evaluări
- Panalytical Ga NXRDbooklet PKiddDocument119 paginiPanalytical Ga NXRDbooklet PKiddYali SillasÎncă nu există evaluări
- Vision Measuring Machines PREDocument32 paginiVision Measuring Machines PREpuakalamÎncă nu există evaluări
- OLYMPUS Stream Software PDFDocument20 paginiOLYMPUS Stream Software PDFFALRepresentaionesÎncă nu există evaluări
- Morphological Image ProcessingDocument21 paginiMorphological Image Processinglephuckt0% (1)
- Optical Aberrations in Head-Up Displays - DiazDocument98 paginiOptical Aberrations in Head-Up Displays - DiazElke AnderssonÎncă nu există evaluări
- Bio-nanoimaging: Protein Misfolding and AggregationDe la EverandBio-nanoimaging: Protein Misfolding and AggregationÎncă nu există evaluări
- Engineering Plasticity: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionDe la EverandEngineering Plasticity: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionÎncă nu există evaluări
- Solo Cup Detail 2Document1 paginăSolo Cup Detail 2Chris BurgerÎncă nu există evaluări
- Solo Cup DetailDocument1 paginăSolo Cup DetailChris BurgerÎncă nu există evaluări
- WP IntelligentFusion - EN .20180817.v1-0.U.USL - 1 PDFDocument3 paginiWP IntelligentFusion - EN .20180817.v1-0.U.USL - 1 PDFChris BurgerÎncă nu există evaluări
- Dimensional and Surface Texture Characterization in Fused Deposition Modelling (FDM) With ABS PlusDocument8 paginiDimensional and Surface Texture Characterization in Fused Deposition Modelling (FDM) With ABS PlusChris BurgerÎncă nu există evaluări
- Dimensional Tolerances For Additive Manufacturing: Experimental Investigation For Fused Deposition ModelingDocument6 paginiDimensional Tolerances For Additive Manufacturing: Experimental Investigation For Fused Deposition ModelingChris BurgerÎncă nu există evaluări
- Snap-Fit Joints For Plastics (BMS Version)Document26 paginiSnap-Fit Joints For Plastics (BMS Version)Bram Hermans100% (1)
- CUIT 201 Assignment3 March2023Document2 paginiCUIT 201 Assignment3 March2023crybert zinyamaÎncă nu există evaluări
- MGNM801 Ca2Document19 paginiMGNM801 Ca2Atul KumarÎncă nu există evaluări
- Code of Federal RegulationsDocument14 paginiCode of Federal RegulationsdiwolfieÎncă nu există evaluări
- Control System PPT DO1Document11 paginiControl System PPT DO1Luis AndersonÎncă nu există evaluări
- Bilateral Transfer of LearningDocument18 paginiBilateral Transfer of Learningts2200419Încă nu există evaluări
- Tekla SoakwayDocument2 paginiTekla SoakwayBalaji Naik100% (1)
- IU IIDC Time Management and Organizational SkillsDocument40 paginiIU IIDC Time Management and Organizational SkillsAsger HamzaÎncă nu există evaluări
- Design of Footing R1Document8 paginiDesign of Footing R1URVESHKUMAR PATELÎncă nu există evaluări
- Module 1 Supply Chain Management in Hospitality IndustryDocument39 paginiModule 1 Supply Chain Management in Hospitality IndustryHazelyn BiagÎncă nu există evaluări
- Unit 3Document5 paginiUnit 3Narasimman DonÎncă nu există evaluări
- Filling The Propylene Gap On Purpose TechnologiesDocument12 paginiFilling The Propylene Gap On Purpose Technologiesvajidqc100% (1)
- Norberto Elias: Graduation of Teach Portuguese Language With Ability in EnglishDocument14 paginiNorberto Elias: Graduation of Teach Portuguese Language With Ability in EnglishGildo Joaquim FranciscoÎncă nu există evaluări
- Fiedler1950 - A Comparison of Therapeutic Relationships in PsychoanalyticDocument10 paginiFiedler1950 - A Comparison of Therapeutic Relationships in PsychoanalyticAnca-Maria CovaciÎncă nu există evaluări
- PH-01 (KD 3.1) Filling Out Forms (PG20) - GFormDocument4 paginiPH-01 (KD 3.1) Filling Out Forms (PG20) - GFormLahita AzizahÎncă nu există evaluări
- 1st Unseen Passage For Class 5 in EnglishDocument7 pagini1st Unseen Passage For Class 5 in EnglishVibhav SinghÎncă nu există evaluări
- Analyst - Finance, John Lewis John Lewis PartnershipDocument2 paginiAnalyst - Finance, John Lewis John Lewis Partnershipsecret_1992Încă nu există evaluări
- (14062020 0548) HF Uniform Logo GuidelinesDocument4 pagini(14062020 0548) HF Uniform Logo GuidelinesBhargaviÎncă nu există evaluări
- 20235UGSEM2206Document2 pagini20235UGSEM2206Lovepreet KaurÎncă nu există evaluări
- Contribution of Medieval MuslimDocument16 paginiContribution of Medieval Muslimannur osmanÎncă nu există evaluări
- Davis A. Acclimating Pacific White Shrimp, Litopenaeus Vannamei, To Inland, Low-Salinity WatersDocument8 paginiDavis A. Acclimating Pacific White Shrimp, Litopenaeus Vannamei, To Inland, Low-Salinity WatersAngeloÎncă nu există evaluări
- Shift Registers NotesDocument146 paginiShift Registers NotesRajat KumarÎncă nu există evaluări
- Empowerment Series Social Work With Groups Comprehensive Practice and Self Care 10Th Edition Charles Zastrow Full ChapterDocument67 paginiEmpowerment Series Social Work With Groups Comprehensive Practice and Self Care 10Th Edition Charles Zastrow Full Chapterruby.levi441100% (5)
- Drsent PT Practice Sba OspfDocument10 paginiDrsent PT Practice Sba OspfEnergyfellowÎncă nu există evaluări
- EEE301 Digital Electronics Lecture 1 Part 3: Dr. A.S.M. MohsinDocument6 paginiEEE301 Digital Electronics Lecture 1 Part 3: Dr. A.S.M. MohsinAaa AaaÎncă nu există evaluări