S-ar putea să vă placă și
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationDe la EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationÎncă nu există evaluări
- MC Presentation.Document21 paginiMC Presentation.Shuktika SrivastavaÎncă nu există evaluări
- Microprocessor - 8086 Instruction SetsDocument6 paginiMicroprocessor - 8086 Instruction SetsShahanasÎncă nu există evaluări
- 8086 Microprocessor Instruction Set OverviewDocument9 pagini8086 Microprocessor Instruction Set Overviewsiddharth singhÎncă nu există evaluări
- MPMC Unit 2Document16 paginiMPMC Unit 2Nandini NandikantiÎncă nu există evaluări
- Microprocessor - 8086 Instruction SetsDocument8 paginiMicroprocessor - 8086 Instruction SetsSrujan OÎncă nu există evaluări
- 8086 Instruction TypesDocument7 pagini8086 Instruction TypesSamÎncă nu există evaluări
- The 8086 Microprocessor Supports 8 Types of InstructionsDocument6 paginiThe 8086 Microprocessor Supports 8 Types of InstructionsvijaykannamallaÎncă nu există evaluări
- Features of 8086 Microprocessor:: 1. EU (Execution Unit)Document6 paginiFeatures of 8086 Microprocessor:: 1. EU (Execution Unit)Md Raton AliÎncă nu există evaluări
- Chapter 4 - Introduction To Intel 8086 MicroprocessorDocument12 paginiChapter 4 - Introduction To Intel 8086 MicroprocessorNaimur EshanÎncă nu există evaluări
- Coaa Lab Assignment: Name-Dhiraj Kurhade Roll No. - 68 GR No. - 12011151 Div - CS-B Batch - B3Document20 paginiCoaa Lab Assignment: Name-Dhiraj Kurhade Roll No. - 68 GR No. - 12011151 Div - CS-B Batch - B3dhirajÎncă nu există evaluări
- 8086 Pin Diagram Here Is The Pin Diagram of 8086 MicroprocessorDocument17 pagini8086 Pin Diagram Here Is The Pin Diagram of 8086 MicroprocessorRakesh ChaudhuriÎncă nu există evaluări
- 8086 Microprocessor Is An Enhanced Version of 8085microprocessor That Was Designed by Intel in 1976Document17 pagini8086 Microprocessor Is An Enhanced Version of 8085microprocessor That Was Designed by Intel in 1976pradeep akellaÎncă nu există evaluări
- Microprocessor - 8086Document14 paginiMicroprocessor - 8086Poet FaroukÎncă nu există evaluări
- Assembly LanguageDocument13 paginiAssembly Languagesagaria vermaÎncă nu există evaluări
- 8086 Instruction Sets ExplainedDocument10 pagini8086 Instruction Sets ExplainedGemarie ViloriaÎncă nu există evaluări
- Data Transfer InstructionsDocument5 paginiData Transfer InstructionsSaarah PatelÎncă nu există evaluări
- VIMP Micro QuestionsDocument68 paginiVIMP Micro QuestionsayushnaleÎncă nu există evaluări
- Module3 MicDocument10 paginiModule3 MicroshnibijuÎncă nu există evaluări
- Unit-3 CoaDocument65 paginiUnit-3 CoatarunprovidesÎncă nu există evaluări
- 8086 MicroprocessorDocument11 pagini8086 MicroprocessorDhiraj ShahÎncă nu există evaluări
- MPMC UNIT 1 OwnDocument35 paginiMPMC UNIT 1 OwnchintuÎncă nu există evaluări
- Chapter 4 MPDocument33 paginiChapter 4 MPSabonaÎncă nu există evaluări
- Micro 2Document6 paginiMicro 2Zuhaib AyazÎncă nu există evaluări
- 8086 Instruction SetsDocument13 pagini8086 Instruction SetsElanor ElÎncă nu există evaluări
- Instruction Set and ProgrammingDocument46 paginiInstruction Set and ProgrammingPillarisetty PremsaiÎncă nu există evaluări
- Assignment ON Microprocessor AND Microcontroller: Joyal Jose AugustineDocument63 paginiAssignment ON Microprocessor AND Microcontroller: Joyal Jose Augustineajas777BÎncă nu există evaluări
- 8086 Instruction Description and Assembler Directives: Lecture Note OnDocument11 pagini8086 Instruction Description and Assembler Directives: Lecture Note Onnskprasad89Încă nu există evaluări
- String Manipulation Instructions: REP: Repeat Instruction PrefixDocument3 paginiString Manipulation Instructions: REP: Repeat Instruction PrefixAnonymous Ht6pfUFnPÎncă nu există evaluări
- Chapter 6 - 8086 Instruction Description and Assembler DirectivesDocument34 paginiChapter 6 - 8086 Instruction Description and Assembler DirectivesgokulchandruÎncă nu există evaluări
- Notes Unit 1Document25 paginiNotes Unit 1Ashish YadavÎncă nu există evaluări
- 8086 Inst and Assembler DirectivesDocument49 pagini8086 Inst and Assembler DirectivesGiridhar Kattiri100% (2)
- 8086 MicroprocessorDocument10 pagini8086 MicroprocessorhemarashuÎncă nu există evaluări
- MC8085Document7 paginiMC8085Bhavani BhavanÎncă nu există evaluări
- Program Control Instructions Lecture 7 and 8Document39 paginiProgram Control Instructions Lecture 7 and 8Dawit Tesfaye100% (1)
- Instruction Set of 8086Document47 paginiInstruction Set of 8086api-249964743Încă nu există evaluări
- Unit-I (Second Half)Document25 paginiUnit-I (Second Half)Soundarrajan RajanÎncă nu există evaluări
- CT1 SolDocument16 paginiCT1 Soln200vermaÎncă nu există evaluări
- Instruction Set 1Document40 paginiInstruction Set 1Play ListÎncă nu există evaluări
- Unit-1 (1) Draw and Explain The Internal Architecture of 8085Document11 paginiUnit-1 (1) Draw and Explain The Internal Architecture of 8085Mann MehtaÎncă nu există evaluări
- Microprocessor - 8086 Instruction SetsDocument4 paginiMicroprocessor - 8086 Instruction SetsYaqeen MatheamÎncă nu există evaluări
- MICDocument30 paginiMICP KalamkarÎncă nu există evaluări
- 8086 NotesDocument43 pagini8086 NotesSuma LathaÎncă nu există evaluări
- Microprocessor - 8085 Internal ArchitectureDocument25 paginiMicroprocessor - 8085 Internal ArchitectureTanveer Ahmed HakroÎncă nu există evaluări
- 1.1 Signal Descriptions - of 8086Document8 pagini1.1 Signal Descriptions - of 8086Khalifa EltayebÎncă nu există evaluări
- Viva Questions and Answers in MP Lab - 1Document6 paginiViva Questions and Answers in MP Lab - 1Sai KrishnaÎncă nu există evaluări
- Microprocessor 8088Document11 paginiMicroprocessor 8088bobby khanÎncă nu există evaluări
- ARM Instruction SetDocument29 paginiARM Instruction SetNeeshank MahajanÎncă nu există evaluări
- PIN Diagram of Intel 8085 Microprocessor - Lecture 3Document14 paginiPIN Diagram of Intel 8085 Microprocessor - Lecture 3ojasbhosale07Încă nu există evaluări
- Introduction to Intel 8085 MicroprocessorDocument35 paginiIntroduction to Intel 8085 MicroprocessorVasudev Rao KonjetiÎncă nu există evaluări
- Unit 3: Machine InstructionsDocument16 paginiUnit 3: Machine Instructionsshreya ChauhanÎncă nu există evaluări
- MP AssignmentDocument12 paginiMP AssignmentAdityaÎncă nu există evaluări
- 17CS44 Module-3 Part-A NotesDocument21 pagini17CS44 Module-3 Part-A Notesvishwa darshiniÎncă nu există evaluări
- 8086 Architecture and Addressing ModesDocument53 pagini8086 Architecture and Addressing ModeskarthiÎncă nu există evaluări
- LPC1768 ADC Programming TutorialDocument11 paginiLPC1768 ADC Programming Tutorialsiva kumaarÎncă nu există evaluări
- Instruction Set of 8086Document45 paginiInstruction Set of 8086M Duraipandian MariappanÎncă nu există evaluări
- M-4 CODocument61 paginiM-4 COrohitrajww4Încă nu există evaluări
- 8086 ArchitectureDocument5 pagini8086 ArchitectureRaees AhmedÎncă nu există evaluări
- Overview or Features of 8086Document33 paginiOverview or Features of 8086Supraja SundaresanÎncă nu există evaluări
- Microprosser 8085Document15 paginiMicroprosser 8085saigdv1978Încă nu există evaluări
- Ultrasonic ArduinoDocument1 paginăUltrasonic ArduinoMohammed AbdulAzizÎncă nu există evaluări
- Servo ArduinoDocument1 paginăServo ArduinoMohammed AbdulAzizÎncă nu există evaluări
- Unit-4 Introduction To 8051 Micro Controller PDFDocument33 paginiUnit-4 Introduction To 8051 Micro Controller PDFMohammed AbdulAzizÎncă nu există evaluări
- Unit-4 Introduction To 8051 Micro Controller PDFDocument33 paginiUnit-4 Introduction To 8051 Micro Controller PDFMohammed AbdulAzizÎncă nu există evaluări
- Unit-6: PIC 18 Microcontroller Programming in CDocument17 paginiUnit-6: PIC 18 Microcontroller Programming in CMohammed AbdulAzizÎncă nu există evaluări
- Unit-3 IO Interface PDFDocument14 paginiUnit-3 IO Interface PDFMohammed AbdulAzizÎncă nu există evaluări
- Unit-3 IO Interface PDFDocument14 paginiUnit-3 IO Interface PDFMohammed AbdulAzizÎncă nu există evaluări
- Pot ArduinoDocument1 paginăPot ArduinoMohammed AbdulAzizÎncă nu există evaluări
- Unit-5 PIC18 Architecture PDFDocument26 paginiUnit-5 PIC18 Architecture PDFMohammed AbdulAziz100% (1)
- Unit-2 Minimum and Maximum Mode Operations PDFDocument14 paginiUnit-2 Minimum and Maximum Mode Operations PDFMohammed AbdulAzizÎncă nu există evaluări
- Unit-5 PIC18 Architecture PDFDocument26 paginiUnit-5 PIC18 Architecture PDFMohammed AbdulAziz100% (1)
- Unit-6 Programming in C For PIC18Document17 paginiUnit-6 Programming in C For PIC18Mohammed AbdulAzizÎncă nu există evaluări
- Billing Trolley ProgramDocument14 paginiBilling Trolley ProgramMohammed AbdulAzizÎncă nu există evaluări
- Unit-2 Minimum and Maximum Mode Operations PDFDocument14 paginiUnit-2 Minimum and Maximum Mode Operations PDFMohammed AbdulAzizÎncă nu există evaluări
- Unit-5 PIC18 Architecture PDFDocument26 paginiUnit-5 PIC18 Architecture PDFMohammed AbdulAziz100% (1)
- Unit-4 Assignment PDFDocument1 paginăUnit-4 Assignment PDFMohammed AbdulAzizÎncă nu există evaluări
- Unit-5 PIC18 Architecture PDFDocument26 paginiUnit-5 PIC18 Architecture PDFMohammed AbdulAziz100% (1)
- IO ProgrammingDocument30 paginiIO ProgrammingMohammed AbdulAzizÎncă nu există evaluări
- Introduction to Microprocessor Architecture EvolutionDocument15 paginiIntroduction to Microprocessor Architecture EvolutionMohammed AbdulAzizÎncă nu există evaluări
- Unit-5 PIC18 Architecture PDFDocument26 paginiUnit-5 PIC18 Architecture PDFMohammed AbdulAziz100% (1)
- Introduction to Microprocessor Architecture EvolutionDocument15 paginiIntroduction to Microprocessor Architecture EvolutionMohammed AbdulAzizÎncă nu există evaluări
- Unit-4 Introduction To 8051 Micro Controller PDFDocument33 paginiUnit-4 Introduction To 8051 Micro Controller PDFMohammed AbdulAzizÎncă nu există evaluări
- Embedded Systems: Unit No:-1 CO:-R16C406A.1 PO's:-PO1, PO2, PO3, PO12Document48 paginiEmbedded Systems: Unit No:-1 CO:-R16C406A.1 PO's:-PO1, PO2, PO3, PO12Mohammed AbdulAzizÎncă nu există evaluări
- Unit-3 IO Interface PDFDocument14 paginiUnit-3 IO Interface PDFMohammed AbdulAzizÎncă nu există evaluări
- Chapter 01Document15 paginiChapter 01Mohammed AbdulAzizÎncă nu există evaluări
- Unit 1Document14 paginiUnit 1Mohammed AbdulAzizÎncă nu există evaluări
- Unit-2 Minimum and Maximum Mode Operations PDFDocument14 paginiUnit-2 Minimum and Maximum Mode Operations PDFMohammed AbdulAzizÎncă nu există evaluări
- Intel 8051 Microcontrollers ArchitectureDocument34 paginiIntel 8051 Microcontrollers ArchitectureMohammed AbdulAzizÎncă nu există evaluări
- Unit 2Document14 paginiUnit 2Mohammed AbdulAzizÎncă nu există evaluări
- Living in The IT Era ModuleDocument97 paginiLiving in The IT Era ModuleChai-chai Cortez CalunodÎncă nu există evaluări
- Track Record Harga SahamDocument8 paginiTrack Record Harga SahamMuhammad FakhrizalÎncă nu există evaluări
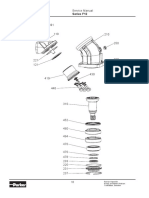
- F12 Series Pump Service Manual Parts List and ToolsDocument4 paginiF12 Series Pump Service Manual Parts List and ToolsLuis AlapazÎncă nu există evaluări
- Word: Mailing Lists and Mail MergeDocument33 paginiWord: Mailing Lists and Mail MergeGlenn Lelis TabucanonÎncă nu există evaluări
- 15 10 2022 Vajiramravi IndianexpressDocument22 pagini15 10 2022 Vajiramravi Indianexpressbhushan palanÎncă nu există evaluări
- Missing Homework TemplateDocument7 paginiMissing Homework Templateafnangetppyqes100% (1)
- V94.2 Beggenum Experience & Improve Concept For Syngas Application PDFDocument24 paginiV94.2 Beggenum Experience & Improve Concept For Syngas Application PDFEliyanto E BudiartoÎncă nu există evaluări
- GPS data shows mobile network availability across FaisalabadDocument10 paginiGPS data shows mobile network availability across FaisalabadPDMA PUNJABÎncă nu există evaluări
- Professional Summary: Sap FicaDocument3 paginiProfessional Summary: Sap FicaAkhilesh AgnihotriÎncă nu există evaluări
- Z15 Gadd4764 04 Se CS2Document4 paginiZ15 Gadd4764 04 Se CS2Eder Alpizar Fuentes50% (2)
- 1st Review Report - Smart Distribution SystemDocument54 pagini1st Review Report - Smart Distribution SystemretechÎncă nu există evaluări
- Fathur Rahman PDFDocument1 paginăFathur Rahman PDFRSCERIA KANDANGANÎncă nu există evaluări
- SAP Collections Management Configuration Guide: Public Document Version: SAP S/4HANA 2020 - 2020-09-07Document34 paginiSAP Collections Management Configuration Guide: Public Document Version: SAP S/4HANA 2020 - 2020-09-07Nagi RijaÎncă nu există evaluări
- DBS10956-13 Installation Manual For DM100 VDRDocument121 paginiDBS10956-13 Installation Manual For DM100 VDRMehmet TaşçıÎncă nu există evaluări
- 3D Instruments Accu-Cal Plus Instruction ManualDocument20 pagini3D Instruments Accu-Cal Plus Instruction ManualGregÎncă nu există evaluări
- Pile Cap For 1 PilesDocument5 paginiPile Cap For 1 Pileshemantkle2u80% (5)
- LARS ProtoLARS TutorialDocument19 paginiLARS ProtoLARS TutorialTristan PogatschnigÎncă nu există evaluări
- Selecting a Viable Business Idea Based on CriteriaDocument3 paginiSelecting a Viable Business Idea Based on CriteriaMarlon Raluto GervacioÎncă nu există evaluări
- Course 1 Anchor Instalation inDocument39 paginiCourse 1 Anchor Instalation inViktorMarkuletsÎncă nu există evaluări
- Fasteners For Use With PC Boards: Types Kfe and Kfse Broaching StandoffsDocument4 paginiFasteners For Use With PC Boards: Types Kfe and Kfse Broaching StandoffsJosé Ignacio CandelaÎncă nu există evaluări
- Evidence-Based ManagementDocument17 paginiEvidence-Based ManagementShruthiÎncă nu există evaluări
- Pre-Opening Checklist For GMV: Sr. No. Area Action Point Stragegy / OperationDocument15 paginiPre-Opening Checklist For GMV: Sr. No. Area Action Point Stragegy / OperationRaman Iyer100% (2)
- Ujian Tengah Semester Genap TA 2020/2021 Fakultas Ekonomi dan SosialDocument4 paginiUjian Tengah Semester Genap TA 2020/2021 Fakultas Ekonomi dan SosialAchmad VidyÎncă nu există evaluări
- Sample OFI Report FormDocument12 paginiSample OFI Report FormSarah Jane UsopÎncă nu există evaluări
- Solutions Manual To Accompany Communication Systems Analysis and Design 9780130402684Document24 paginiSolutions Manual To Accompany Communication Systems Analysis and Design 9780130402684RyanWatsoncxde100% (39)
- 308 Hydraulic Troubleshooting Course DescriptionDocument2 pagini308 Hydraulic Troubleshooting Course Descriptionnuncafalha0% (1)
- Custom Objects, Fields, Tabs, Related Lists, List ViewsDocument7 paginiCustom Objects, Fields, Tabs, Related Lists, List ViewsAjay GhugeÎncă nu există evaluări
- PT United Tractors TBK: On Komatsu Dump TruckDocument21 paginiPT United Tractors TBK: On Komatsu Dump Truckagus haryonoÎncă nu există evaluări
- Q3-CAPSLET-56-ANS-SHEET-lowerlevel 1Document3 paginiQ3-CAPSLET-56-ANS-SHEET-lowerlevel 1Jimboy MaglonÎncă nu există evaluări
- Algorithm Design and Analysis (CS60007) Assignment 1: 1 Interval SchedulingDocument6 paginiAlgorithm Design and Analysis (CS60007) Assignment 1: 1 Interval SchedulingBraj SehraÎncă nu există evaluări
- Chip War: The Quest to Dominate the World's Most Critical TechnologyDe la EverandChip War: The Quest to Dominate the World's Most Critical TechnologyEvaluare: 4.5 din 5 stele4.5/5 (227)
- Dancing with Qubits: How quantum computing works and how it can change the worldDe la EverandDancing with Qubits: How quantum computing works and how it can change the worldEvaluare: 5 din 5 stele5/5 (1)
- iPhone Photography: A Ridiculously Simple Guide To Taking Photos With Your iPhoneDe la EverandiPhone Photography: A Ridiculously Simple Guide To Taking Photos With Your iPhoneÎncă nu există evaluări
- Model-based System and Architecture Engineering with the Arcadia MethodDe la EverandModel-based System and Architecture Engineering with the Arcadia MethodÎncă nu există evaluări
- Chip War: The Fight for the World's Most Critical TechnologyDe la EverandChip War: The Fight for the World's Most Critical TechnologyEvaluare: 4.5 din 5 stele4.5/5 (82)
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002De la EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Evaluare: 5 din 5 stele5/5 (1)
- 8051 Microcontroller: An Applications Based IntroductionDe la Everand8051 Microcontroller: An Applications Based IntroductionEvaluare: 5 din 5 stele5/5 (6)
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102De la EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Evaluare: 5 din 5 stele5/5 (2)
- Amazon Web Services (AWS) Interview Questions and AnswersDe la EverandAmazon Web Services (AWS) Interview Questions and AnswersEvaluare: 4.5 din 5 stele4.5/5 (3)
- Tor Darknet Bundle: Master the Art of InvisibilityDe la EverandTor Darknet Bundle: Master the Art of InvisibilityÎncă nu există evaluări
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XDe la EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XEvaluare: 3 din 5 stele3/5 (2)
- Hacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxDe la EverandHacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxÎncă nu există evaluări
- The No Bull$#!£ Guide to Building Your Own PC: No Bull GuidesDe la EverandThe No Bull$#!£ Guide to Building Your Own PC: No Bull GuidesÎncă nu există evaluări
- Computer Science: A Concise IntroductionDe la EverandComputer Science: A Concise IntroductionEvaluare: 4.5 din 5 stele4.5/5 (14)
- Samsung Galaxy S20 Learners Guide: A Comprehensive Manual to Help You Master Your Samsung Galaxy S20 and S20 Series like a ProDe la EverandSamsung Galaxy S20 Learners Guide: A Comprehensive Manual to Help You Master Your Samsung Galaxy S20 and S20 Series like a ProÎncă nu există evaluări
- Creative Selection: Inside Apple's Design Process During the Golden Age of Steve JobsDe la EverandCreative Selection: Inside Apple's Design Process During the Golden Age of Steve JobsEvaluare: 4.5 din 5 stele4.5/5 (49)
- Embedded Systems: ARM Programming and OptimizationDe la EverandEmbedded Systems: ARM Programming and OptimizationÎncă nu există evaluări
- 2018 (40+) Best Free Apps for Kindle Fire Tablets: +Simple Step-by-Step Guide For New Kindle Fire UsersDe la Everand2018 (40+) Best Free Apps for Kindle Fire Tablets: +Simple Step-by-Step Guide For New Kindle Fire UsersÎncă nu există evaluări