S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- ESD Mid Sem Exam 2019 - KeyDocument5 paginiESD Mid Sem Exam 2019 - Keyashish6789Încă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Codesign Paper PresentationDocument14 paginiCodesign Paper Presentationashish6789Încă nu există evaluări
- Manual For Communication Systems Laboratory (EEE/ECE F311)Document13 paginiManual For Communication Systems Laboratory (EEE/ECE F311)ashish6789Încă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- BITS-Pilani, Hyderabad Campus: Course Description M.E. Communication EngineeringDocument6 paginiBITS-Pilani, Hyderabad Campus: Course Description M.E. Communication Engineeringashish6789Încă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- RK Urs I AbstractDocument1 paginăRK Urs I Abstractashish6789Încă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- BITS-Pilani, Hyderabad Campus: Course Description M.E. MicroelectronicsDocument5 paginiBITS-Pilani, Hyderabad Campus: Course Description M.E. Microelectronicsashish6789Încă nu există evaluări
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Information Theory: Information Theory and The Digital Age A, C, K, T, YDocument27 paginiInformation Theory: Information Theory and The Digital Age A, C, K, T, YidayacgÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Voltage, Current and Impedance Are Valid. at Intermediate Frequencies, The Analysis Needs Inclusion of An AdditionalDocument2 paginiVoltage, Current and Impedance Are Valid. at Intermediate Frequencies, The Analysis Needs Inclusion of An Additionalashish6789Încă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Object Tracking System Using Camshift Meanshift and Kalman Filter PDFDocument6 paginiObject Tracking System Using Camshift Meanshift and Kalman Filter PDFashish6789Încă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Object Tracking System Using Camshift Meanshift and Kalman FilterDocument6 paginiObject Tracking System Using Camshift Meanshift and Kalman Filterashish6789Încă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Real-Time Particle Filters: Cody Kwok Dieter Fox Marina Meil ADocument8 paginiReal-Time Particle Filters: Cody Kwok Dieter Fox Marina Meil Aashish6789Încă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- AsddDocument2 paginiAsddashish6789Încă nu există evaluări
- Diagnostic Imaging of The Pharynx and Esophagus: Key PointsDocument33 paginiDiagnostic Imaging of The Pharynx and Esophagus: Key PointsChutcharwan JintasoponÎncă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Flusser-The FactoryDocument2 paginiFlusser-The FactoryAlberto SerranoÎncă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Essential Calculus Skills Practice Workbook With Full SolutionsDocument528 paginiEssential Calculus Skills Practice Workbook With Full SolutionsGerardo Navarro Sánchez94% (65)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Psle Science Keywords !Document12 paginiPsle Science Keywords !Aftertea CarousellÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- 988611457NK448908 Vehicle Scan ReportDocument5 pagini988611457NK448908 Vehicle Scan ReportVictor Daniel Piñeros ZubietaÎncă nu există evaluări
- Dna Adduct As Biomarker: Prof. Dr. Yahdiana Harahap, MS, AptDocument68 paginiDna Adduct As Biomarker: Prof. Dr. Yahdiana Harahap, MS, AptNadia AaqilahÎncă nu există evaluări
- Chapter 7: Protein Function Part I: Myoglobin and HemoglobinDocument27 paginiChapter 7: Protein Function Part I: Myoglobin and HemoglobineliÎncă nu există evaluări
- GBJ0232 - en GLX 3101 T2Document43 paginiGBJ0232 - en GLX 3101 T2mnbvqwert100% (2)
- Test09 Eoc Algebra2 ReducedDocument33 paginiTest09 Eoc Algebra2 ReducedkristymadimikeÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Badminton ReviewerDocument10 paginiBadminton ReviewerHailsey WinterÎncă nu există evaluări
- Critical Analysis of W.H Auden Poems The PDFDocument8 paginiCritical Analysis of W.H Auden Poems The PDFMöĤämmĔd äĹ-ŚäÁdï100% (1)
- 1 s2.0 S1110016815000563 Main PDFDocument13 pagini1 s2.0 S1110016815000563 Main PDFvale1299Încă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Sap Ewm OverviewDocument11 paginiSap Ewm OverviewsachinÎncă nu există evaluări
- SOPDocument16 paginiSOPjerome marquezÎncă nu există evaluări
- ETR Series: A Full Spectrum of Products To Solve Your Application NeedsDocument106 paginiETR Series: A Full Spectrum of Products To Solve Your Application Needs周小安Încă nu există evaluări
- PH & TemperatureDocument8 paginiPH & TemperatureNanaÎncă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Karl MarxDocument4 paginiKarl Marxeirvine noah isidroÎncă nu există evaluări
- Phrasal Verbs Related To HealthDocument2 paginiPhrasal Verbs Related To HealthKnuckles El Naco Narco LechugueroÎncă nu există evaluări
- Birla MEEP Op ManualDocument43 paginiBirla MEEP Op ManualAshok ChettiyarÎncă nu există evaluări
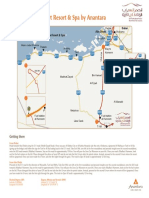
- Qasr Al Sarab Desert Resort Location Map June2012Document1 paginăQasr Al Sarab Desert Resort Location Map June2012Anant GârgÎncă nu există evaluări
- Homeo Treatment of Eye Diseases and AllergiesDocument17 paginiHomeo Treatment of Eye Diseases and AllergiesZia AbbasiÎncă nu există evaluări
- DIVAR IP All-In-One 7000 3U Datasheet 51 en 66297110155Document5 paginiDIVAR IP All-In-One 7000 3U Datasheet 51 en 66297110155Javier RochaÎncă nu există evaluări
- Gondola CalculationDocument6 paginiGondola CalculationBudi SusantoÎncă nu există evaluări
- AS and A Level: ChemistryDocument11 paginiAS and A Level: ChemistryStingy BieÎncă nu există evaluări
- Designing and Building A Computer TableDocument9 paginiDesigning and Building A Computer Tablemaster_codersÎncă nu există evaluări
- The Practical Reference Guide ForDocument4 paginiThe Practical Reference Guide Forelias667Încă nu există evaluări
- Azure Machine Learning StudioDocument17 paginiAzure Machine Learning StudioNurain IsmailÎncă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- English2 Q2 Summative Assessment 4 2Document4 paginiEnglish2 Q2 Summative Assessment 4 2ALNIE PANGANIBANÎncă nu există evaluări
- Tokyo Guidelines 2018Document115 paginiTokyo Guidelines 2018Alik Razi100% (1)
- Metal Workers BizHouse - UkDocument3 paginiMetal Workers BizHouse - UkAlex BekeÎncă nu există evaluări