S-ar putea să vă placă și
- AP3 - Métodos ComputacionaisDocument15 paginiAP3 - Métodos ComputacionaisEduarda SantanaÎncă nu există evaluări
- CCH Calculo NuméricoDocument11 paginiCCH Calculo NuméricoFernando GabrielÎncă nu există evaluări
- Matematica FBDocument3 paginiMatematica FBPes100% (1)
- 5 Interpolacao 3 ErrosInterpolaçãoDocument15 pagini5 Interpolacao 3 ErrosInterpolaçãoCleverson RomagnoliÎncă nu există evaluări
- Exame1aepoca 04jan10Document10 paginiExame1aepoca 04jan10saraÎncă nu există evaluări
- Interploação Polinomial de LagrangeDocument26 paginiInterploação Polinomial de Lagrangegersonfn5656Încă nu există evaluări
- Conteúdo Essencial-Unidade 3-Calculo NuméricoDocument29 paginiConteúdo Essencial-Unidade 3-Calculo NuméricoJulia DiasÎncă nu există evaluări
- CN - Assunto04 - InterpolaçãoDocument29 paginiCN - Assunto04 - InterpolaçãoNeilson Luniere VilaçaÎncă nu există evaluări
- Interpolação Por Lagrange - CAN (2) - 231113 - 174414Document30 paginiInterpolação Por Lagrange - CAN (2) - 231113 - 174414Leonardo SantosÎncă nu există evaluări
- CN - Aula Teorica 4Document7 paginiCN - Aula Teorica 4Aarao MachaiaÎncă nu există evaluări
- Análise Numérica - Aula 6 - Métodos de Interpolação PolimonialDocument9 paginiAnálise Numérica - Aula 6 - Métodos de Interpolação PolimonialJorge EustaquioÎncă nu există evaluări
- CALCULO NUMERICO COMPUTACIONAL - Capítulo 7Document20 paginiCALCULO NUMERICO COMPUTACIONAL - Capítulo 7InfopronatecÎncă nu există evaluări
- Aulas Cap4Document107 paginiAulas Cap4Rfgd376Încă nu există evaluări
- Interpolação e ExercíciosDocument9 paginiInterpolação e ExercíciosSarahOliveiraBarbosaÎncă nu există evaluări
- Prova Simulada 2Document149 paginiProva Simulada 2DenilsonÎncă nu există evaluări
- Métodos Numéricos - Aula 02Document28 paginiMétodos Numéricos - Aula 02Paulo Cec FigueredoÎncă nu există evaluări
- Lagrange e NewtonDocument28 paginiLagrange e NewtonMaria Eduarda VazÎncă nu există evaluări
- Análise e Computaçao NuméricaDocument126 paginiAnálise e Computaçao NuméricammanduaÎncă nu există evaluări
- Prova SimuladaDocument4 paginiProva SimuladaDenilsonÎncă nu există evaluări
- Wakls221 U2s3 Met MatDocument4 paginiWakls221 U2s3 Met MatRoseli DefassioÎncă nu există evaluări
- CADERNO04Document24 paginiCADERNO04RAQUEL PEREIRA DA SILVAÎncă nu există evaluări
- InterpolaçãoDocument4 paginiInterpolaçãoPaulo MarcosÎncă nu există evaluări
- Funções Geratrizes - Jose Armando BarbosaDocument24 paginiFunções Geratrizes - Jose Armando BarbosaMoreiraÎncă nu există evaluări
- Anã - Lise Numã - Rica - Ec-EeDocument131 paginiAnã - Lise Numã - Rica - Ec-EeRute ManusseÎncă nu există evaluări
- 05 InterpolacaoDocument126 pagini05 InterpolacaoLETICIA DAS GRACAS ANTONIO SILVAÎncă nu există evaluări
- 8CN IntegracaoDocument26 pagini8CN IntegracaoPortal de Estudos em QuímicaÎncă nu există evaluări
- Funcao PolinomialDocument17 paginiFuncao PolinomialosadrianoÎncă nu există evaluări
- CN - Aula Teorica 6Document5 paginiCN - Aula Teorica 6Aarao MachaiaÎncă nu există evaluări
- Lista Cálculo NuméricoDocument3 paginiLista Cálculo NuméricoBárbara CarvalhoÎncă nu există evaluări
- Aula 20Document20 paginiAula 20SantendSantendÎncă nu există evaluări
- Ce. Ab. Mtm-Cont. e Atv. 300 e 301-Maio 2021Document6 paginiCe. Ab. Mtm-Cont. e Atv. 300 e 301-Maio 2021Bianca EstêvãoÎncă nu există evaluări
- Marinha 2011 Efomm Oficial Da Marinha Mercante Segundo Dia GabaritoDocument25 paginiMarinha 2011 Efomm Oficial Da Marinha Mercante Segundo Dia GabaritoVictor VitorianoÎncă nu există evaluări
- Interpolacao e Aproximacao Polinomial. Ficha TeoricaDocument13 paginiInterpolacao e Aproximacao Polinomial. Ficha Teoricafrancimota21Încă nu există evaluări
- Zeros Reais Newton Raphson e Secante 2018 2Document8 paginiZeros Reais Newton Raphson e Secante 2018 2HORUS_KHANÎncă nu există evaluări
- Capitulo 4 - Parte IDocument29 paginiCapitulo 4 - Parte IEdmilson FernandesÎncă nu există evaluări
- Trabalho 03 Cálculo NuméricoDocument8 paginiTrabalho 03 Cálculo Numéricocmcn102030Încă nu există evaluări
- Trabalho de Analise HarmonicaDocument11 paginiTrabalho de Analise HarmonicaHenriques LucasÎncă nu există evaluări
- Handout INTERPOLACAO PARTE1Document35 paginiHandout INTERPOLACAO PARTE1Camila CarvalhoÎncă nu există evaluări
- CN - Aula Teorica 11Document6 paginiCN - Aula Teorica 11Aarao MachaiaÎncă nu există evaluări
- Exercicios Resolvidos Integracao EdoDocument4 paginiExercicios Resolvidos Integracao EdoMoisésOliveiraÎncă nu există evaluări
- CN Capt4Document16 paginiCN Capt4Rodrigo RodriguesÎncă nu există evaluări
- 7 Boa Lista So Interpolacao de Lagrange e de NewtonDocument16 pagini7 Boa Lista So Interpolacao de Lagrange e de Newtoncarloareis1864Încă nu există evaluări
- Equacoes Diofantinas LIVRO de ALGEBRADocument12 paginiEquacoes Diofantinas LIVRO de ALGEBRAmgfilho1993Încă nu există evaluări
- Aula 07 - Miscelânea Sobre Raízes de Polinômios II PDFDocument5 paginiAula 07 - Miscelânea Sobre Raízes de Polinômios II PDFLucasÎncă nu există evaluări
- Polinômios ResumoDocument13 paginiPolinômios ResumoAdriano BicalhoÎncă nu există evaluări
- Lista 03 - Derivadas - Regras de Derivacao e Da CadeiaDocument3 paginiLista 03 - Derivadas - Regras de Derivacao e Da CadeiaDaniel TeixeiraÎncă nu există evaluări
- AH (Séries Trigonométricas de Fourier)Document33 paginiAH (Séries Trigonométricas de Fourier)Caito Jorge MurabiuaÎncă nu există evaluări
- Calnum IIIDocument16 paginiCalnum IIIfabio ferreira de almeidaÎncă nu există evaluări
- Aula LagrangeDocument38 paginiAula LagrangeLucas Consul SilvaÎncă nu există evaluări
- Exercicios Resolvidos InterpolaçãoDocument8 paginiExercicios Resolvidos InterpolaçãoNériton CarlosÎncă nu există evaluări
- CN AulaTeorica3Document9 paginiCN AulaTeorica3Crimildo Marcelo MurrureÎncă nu există evaluări
- Aula-24 - Soluções de Sistemas de EDOs-1Document13 paginiAula-24 - Soluções de Sistemas de EDOs-1Magno ReisÎncă nu există evaluări
- DESTINATÁRIO Criffer - Gestão FuturaDocument1 paginăDESTINATÁRIO Criffer - Gestão FuturaAnonymous FZRMlqrp7Încă nu există evaluări
- Treinamento - ATAGDocument52 paginiTreinamento - ATAGAnonymous FZRMlqrp7Încă nu există evaluări
- AstroDocument10 paginiAstroAnonymous FZRMlqrp7Încă nu există evaluări
- Tabela de Exames - PreencherDocument1 paginăTabela de Exames - PreencherAnonymous FZRMlqrp7Încă nu există evaluări
- Orçamentos Exames LaboratoriaisDocument2 paginiOrçamentos Exames LaboratoriaisAnonymous FZRMlqrp7Încă nu există evaluări
- Artigo - Walter - Nr-12 - InteressanteDocument5 paginiArtigo - Walter - Nr-12 - InteressanteAnonymous FZRMlqrp7Încă nu există evaluări
- Ficha - Inscricao Sedmed NR-35Document2 paginiFicha - Inscricao Sedmed NR-35Anonymous FZRMlqrp7Încă nu există evaluări
- Ficha de EPI OKDocument1 paginăFicha de EPI OKAnonymous FZRMlqrp7Încă nu există evaluări
- Modelo de Certificado de Palestra - SIPAT PDFDocument14 paginiModelo de Certificado de Palestra - SIPAT PDFAnonymous FZRMlqrp7Încă nu există evaluări
- Ficha - Inscricao Sedmed NR-12 Maquinas e EquipamentosDocument2 paginiFicha - Inscricao Sedmed NR-12 Maquinas e EquipamentosAnonymous FZRMlqrp7Încă nu există evaluări
- Lista de Presença de Treinamento Maquina de SoldaDocument2 paginiLista de Presença de Treinamento Maquina de SoldaAnonymous FZRMlqrp7Încă nu există evaluări
- Tabela Dosimetrica - Operacional - InflexDocument1 paginăTabela Dosimetrica - Operacional - InflexAnonymous FZRMlqrp7Încă nu există evaluări
- Prancha A4 - AndaimeDocument1 paginăPrancha A4 - AndaimeAnonymous FZRMlqrp7100% (1)
- PPRADocument35 paginiPPRAAnonymous FZRMlqrp7Încă nu există evaluări
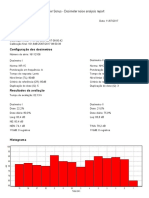
- Relatório de Análise - #81819270-5Document1 paginăRelatório de Análise - #81819270-5Anonymous FZRMlqrp7Încă nu există evaluări
- Oee - Eficiencia GlobalDocument10 paginiOee - Eficiencia GlobalconmarcosÎncă nu există evaluări
- Registro de Presença de TreinamentoDocument1 paginăRegistro de Presença de TreinamentoAnonymous FZRMlqrp7Încă nu există evaluări
- Orc 015-17 - Ita Glass - 9R Informaçoes Tecnicas LAPIDADORADocument1 paginăOrc 015-17 - Ita Glass - 9R Informaçoes Tecnicas LAPIDADORAAnonymous FZRMlqrp7Încă nu există evaluări
- Residuos InfectantesDocument41 paginiResiduos InfectantesHerbert BritoÎncă nu există evaluări
- Documentos Necessários para IntegraçãoDocument5 paginiDocumentos Necessários para IntegraçãoAnonymous FZRMlqrp7Încă nu există evaluări
- Relatório de Análise - #81819270-5Document1 paginăRelatório de Análise - #81819270-5Anonymous FZRMlqrp7Încă nu există evaluări
- Relatório de Análise - #81819270-5Document1 paginăRelatório de Análise - #81819270-5Anonymous FZRMlqrp7Încă nu există evaluări
- Decreto 13071-2010Document6 paginiDecreto 13071-2010Felipe ColmanÎncă nu există evaluări
- Aula 08 - Gestão Da Manutenção (MAT)Document7 paginiAula 08 - Gestão Da Manutenção (MAT)Anonymous FZRMlqrp7Încă nu există evaluări
- Tabela Dosimetrica - HelioDocument1 paginăTabela Dosimetrica - HelioAnonymous FZRMlqrp7Încă nu există evaluări
- Tabela Dosimetrica Sonus InflexDocument1 paginăTabela Dosimetrica Sonus InflexAnonymous FZRMlqrp7Încă nu există evaluări
- Tabela Dosimetrica Sonus Inflex Pag 04 PDFDocument1 paginăTabela Dosimetrica Sonus Inflex Pag 04 PDFAnonymous FZRMlqrp7Încă nu există evaluări
- Curso de NR 12 UnochapecoDocument156 paginiCurso de NR 12 UnochapecoeletricaplasÎncă nu există evaluări
- Tabela Dosimetrica - Operacional - InflexDocument1 paginăTabela Dosimetrica - Operacional - InflexAnonymous FZRMlqrp7Încă nu există evaluări
- Tabela Dosimetrica Sonus Inflex Pag 03Document1 paginăTabela Dosimetrica Sonus Inflex Pag 03Anonymous FZRMlqrp7Încă nu există evaluări
- Manual Fechadura HDL C-90Document1 paginăManual Fechadura HDL C-90Adriano Gomes100% (1)
- Catálogo de Produtos Skil 2016Document72 paginiCatálogo de Produtos Skil 2016Wellington BonessÎncă nu există evaluări
- Ana Luiza Costa FGV CpdocDocument107 paginiAna Luiza Costa FGV CpdoccorreiojmÎncă nu există evaluări
- Folheto Polo Hatch 2013 PDFDocument2 paginiFolheto Polo Hatch 2013 PDFIvan MedinaÎncă nu există evaluări
- Linguagem para Psicologia SocialDocument11 paginiLinguagem para Psicologia SocialpamÎncă nu există evaluări
- Estatística ResumoDocument23 paginiEstatística Resumotrying to draw things100% (1)
- Introduçao - Dinâmica Das EstruturasDocument50 paginiIntroduçao - Dinâmica Das EstruturasBárbara CamposÎncă nu există evaluări
- Esto QueDocument65 paginiEsto QueSeba CamposÎncă nu există evaluări
- A Divina ProporçãoDocument4 paginiA Divina ProporçãoEduardo ValeiroÎncă nu există evaluări
- Notas de Aulas - Hidráulica 1 - Introdução e Parte IDocument101 paginiNotas de Aulas - Hidráulica 1 - Introdução e Parte Ikleber AlersonÎncă nu există evaluări
- Caso Clínico SAEDocument7 paginiCaso Clínico SAEValdir GomesÎncă nu există evaluări
- Raciocínio Lógico Matemático Sentencial CESPE-UnB PDFDocument11 paginiRaciocínio Lógico Matemático Sentencial CESPE-UnB PDFErick MouraÎncă nu există evaluări
- Plan0 de Ensino - S.B.C2022.2Document4 paginiPlan0 de Ensino - S.B.C2022.2infoeletronicoÎncă nu există evaluări
- A Violência em "Rosso Malpelo" de Giovanni VergaDocument9 paginiA Violência em "Rosso Malpelo" de Giovanni VergajorgedlopesÎncă nu există evaluări
- Tabela de Preços A - Area - Externa Athermic 2023 PDFDocument5 paginiTabela de Preços A - Area - Externa Athermic 2023 PDFDieniffer PortoÎncă nu există evaluări
- AT-9,10 Comunicação de Dados, 2021Document34 paginiAT-9,10 Comunicação de Dados, 2021Telcia Bento HeleÎncă nu există evaluări
- Microsoft Word - SINTESE SOBRE DISTRIBUIÇAO, ABUNDANCIA, POTENCIAL PESQUEIRO E BIOLOGIA DA LAGOSTE DO NORDESTE DO BRASILDocument23 paginiMicrosoft Word - SINTESE SOBRE DISTRIBUIÇAO, ABUNDANCIA, POTENCIAL PESQUEIRO E BIOLOGIA DA LAGOSTE DO NORDESTE DO BRASILcelio soaresÎncă nu există evaluări
- Aula - Introdução À Educação Do CampoDocument13 paginiAula - Introdução À Educação Do CampoAstrogildo de FrançaÎncă nu există evaluări
- Aula+5+ +Transtorno+Da+Personalidade+BorderlineDocument9 paginiAula+5+ +Transtorno+Da+Personalidade+BorderlineFERNANDAÎncă nu există evaluări
- 269 Lição 2Document9 pagini269 Lição 2Laura leouaÎncă nu există evaluări
- Eletromagnetismo 2Document4 paginiEletromagnetismo 2patrick1984100% (1)
- Estruturas de Madeira 05bDocument12 paginiEstruturas de Madeira 05bMarcelo Issler Ferreira SousaÎncă nu există evaluări
- Fichas de Matematica 2º AnoDocument15 paginiFichas de Matematica 2º AnoAlzira Mesquita0% (2)
- Tuina Apostila Final 15-10-12Document129 paginiTuina Apostila Final 15-10-12haczelÎncă nu există evaluări
- Ricardo Reis - Heterónimo de Fernando PessoaDocument2 paginiRicardo Reis - Heterónimo de Fernando PessoaAluno Leticia Rocha ValeÎncă nu există evaluări
- PPC Farmacia 2012 Final PDFDocument300 paginiPPC Farmacia 2012 Final PDFcgtnetoÎncă nu există evaluări
- 1 Astrologia e PsicologiaDocument33 pagini1 Astrologia e PsicologiaCristina GameiroÎncă nu există evaluări
- CAMILO - PolemicasDocument8 paginiCAMILO - Polemicasw0lf3nst3inÎncă nu există evaluări
- Vigiar e PunirDocument2 paginiVigiar e PunirFabportoÎncă nu există evaluări
- Aspectos Do Fantastico e Tradução de Um Conto de Marcel AyméDocument42 paginiAspectos Do Fantastico e Tradução de Um Conto de Marcel AyméThiago TimÎncă nu există evaluări