S-ar putea să vă placă și
- 100 circuitos de shields para arduino (español)De la Everand100 circuitos de shields para arduino (español)Evaluare: 3.5 din 5 stele3.5/5 (3)
- Montaje y mantenimiento de equipos de audio, video y telecomunicaciones. TMVG0209De la EverandMontaje y mantenimiento de equipos de audio, video y telecomunicaciones. TMVG0209Evaluare: 5 din 5 stele5/5 (1)
- Reingeniería De Procesos De Manufactura Industrial: Colaboración Entre Cuerpos Académicos Tlaxcala Y Puebla (Enero 2021)De la EverandReingeniería De Procesos De Manufactura Industrial: Colaboración Entre Cuerpos Académicos Tlaxcala Y Puebla (Enero 2021)Evaluare: 5 din 5 stele5/5 (2)
- Francisca Reyes Amigo Control Semana 8.Document5 paginiFrancisca Reyes Amigo Control Semana 8.Francisca Reyes AmigoÎncă nu există evaluări
- EcolocalizadorDocument5 paginiEcolocalizadorDavid RiedelÎncă nu există evaluări
- InformeDocument5 paginiInformeGerson Quintanilla FloresÎncă nu există evaluări
- Tutorial Arduino medir distancia sensor ultrasónico HC-SR04Document3 paginiTutorial Arduino medir distancia sensor ultrasónico HC-SR04Ulises OGÎncă nu există evaluări
- 06 Sensor Ultrasonico HC-SR04Document13 pagini06 Sensor Ultrasonico HC-SR04Jordy Toro RojasÎncă nu există evaluări
- Sensor de Distancia HC-SR04 Con ArduinoDocument5 paginiSensor de Distancia HC-SR04 Con Arduinoalberto pazkualÎncă nu există evaluări
- Práctica 4 Sensor UltrasonicoDocument8 paginiPráctica 4 Sensor UltrasonicoKarla roblesÎncă nu există evaluări
- Ultrasonico Con My DaqDocument5 paginiUltrasonico Con My DaqDiego FabricioÎncă nu există evaluări
- Actividad14 SensorDistanciaDocument12 paginiActividad14 SensorDistanciaManuel Sanchez CheroÎncă nu există evaluări
- Práctica No 9-CIDI-IDocument8 paginiPráctica No 9-CIDI-IJuan CarlosÎncă nu există evaluări
- Arduino y Sensor Ultrasónico HC-SR04Document18 paginiArduino y Sensor Ultrasónico HC-SR04jorge7casmaÎncă nu există evaluări
- Sensor ultrasonico Arduino distancia objetos alarma LED buzzerDocument5 paginiSensor ultrasonico Arduino distancia objetos alarma LED buzzergilbertocrÎncă nu există evaluări
- P3 UltrasonicoDocument15 paginiP3 Ultrasonicojleonardvo23Încă nu există evaluări
- Tutorial de Arduino y Sensor Ultrasónico HCDocument7 paginiTutorial de Arduino y Sensor Ultrasónico HCMarco ColomaÎncă nu există evaluări
- Que Es Un Sensor de UltrasonidosDocument7 paginiQue Es Un Sensor de UltrasonidosLuis AnthonyÎncă nu există evaluări
- GP03 - Sensor de Ultrasonido PDFDocument11 paginiGP03 - Sensor de Ultrasonido PDFcolapse teiwinÎncă nu există evaluări
- Sensor UltrasónicoDocument11 paginiSensor UltrasónicoAbel Isaac Sánchez BlancoÎncă nu există evaluări
- Practica UltrasonicoDocument5 paginiPractica UltrasonicoGalileo VelazquezÎncă nu există evaluări
- Tutorial HC-SR04 ArduinoDocument25 paginiTutorial HC-SR04 ArduinoMichael Mendigure PumacharaÎncă nu există evaluări
- Sensor de Ultrasonidos Hc-sr04Document10 paginiSensor de Ultrasonidos Hc-sr04Micaela MartinezÎncă nu există evaluări
- Ultrasonido 1Document6 paginiUltrasonido 1navarromelendezjeshua128Încă nu există evaluări
- Lección 11 Módulo de Sensor Ultrasónico HC-SR04Document9 paginiLección 11 Módulo de Sensor Ultrasónico HC-SR04Oziel CaballeroÎncă nu există evaluări
- Sensor UltrasónicoDocument4 paginiSensor Ultrasónicomakintosh81Încă nu există evaluări
- Calibración sensor HC-SR04Document13 paginiCalibración sensor HC-SR04RuedaMarinJorgeAndresÎncă nu există evaluări
- Modulo Sensor Ultrasónico HCDocument10 paginiModulo Sensor Ultrasónico HCJuan Camilo Rios SanchezÎncă nu există evaluări
- Practica 9 - Seminario de Sensores PDFDocument5 paginiPractica 9 - Seminario de Sensores PDFMICHAELL IBBAN GARCIA PERDOMOÎncă nu există evaluări
- Sensor DistanciaDocument11 paginiSensor Distanciaroures76Încă nu există evaluări
- Informe UltrasonicoDocument7 paginiInforme UltrasonicoSantiGuanoluisaÎncă nu există evaluări
- Práctica 6y9 SensoresDocument10 paginiPráctica 6y9 SensoresJoshua MadoraÎncă nu există evaluări
- Reporte S - UltraDocument13 paginiReporte S - UltraZuriel Montiel100% (1)
- Proyecto Medidor de NivelDocument13 paginiProyecto Medidor de NivelGiovanni QCÎncă nu există evaluări
- Practica 5 Instrumentacion Sensor UltrasonicoDocument8 paginiPractica 5 Instrumentacion Sensor UltrasonicoSuuaGÎncă nu există evaluări
- Sensor ultrasonido HC-SR04 características y circuito de alimentaciónDocument4 paginiSensor ultrasonido HC-SR04 características y circuito de alimentacióngabriela davalosÎncă nu există evaluări
- Marco TeoricoDocument12 paginiMarco Teoricotsuyogari311Încă nu există evaluări
- Tutorial Sensor Ultrasónico HCDocument4 paginiTutorial Sensor Ultrasónico HCalejandroÎncă nu există evaluări
- Sensor Ultrasónico 4terminalesDocument8 paginiSensor Ultrasónico 4terminalesAlandelaRosaÎncă nu există evaluări
- Tutorial de Arduino Y Sensor Ultrasónico Hc-Sr04Document5 paginiTutorial de Arduino Y Sensor Ultrasónico Hc-Sr04JOSE DE JESUS GONZALEZ BAUTISTAÎncă nu există evaluări
- Practica 10Document6 paginiPractica 10Chelsea OlivaresÎncă nu există evaluări
- Tutorial Sensor Ultrasónico HC-SR04Document5 paginiTutorial Sensor Ultrasónico HC-SR04Cavallin CarlosÎncă nu există evaluări
- Programación de dispositivos de entrada con sensor ultrasónico HC-SR04Document6 paginiProgramación de dispositivos de entrada con sensor ultrasónico HC-SR04Justino Reyes RamirezÎncă nu există evaluări
- LabView guía sensoresDocument23 paginiLabView guía sensoresHernanPedrozoVillanuevaÎncă nu există evaluări
- Práctica 2 Sensor UltrasónicoDocument10 paginiPráctica 2 Sensor UltrasónicoClaudio Martinez CastroÎncă nu există evaluări
- R1 - SistemasCtrl Grupo2 L.OriveDocument6 paginiR1 - SistemasCtrl Grupo2 L.Oriveorive34Încă nu există evaluări
- Informe K1Document11 paginiInforme K1Alex Laftar FlowÎncă nu există evaluări
- Tarea N° 2 Arduino PDFDocument9 paginiTarea N° 2 Arduino PDFGUIDO CHAMBILLA CONDORIÎncă nu există evaluări
- Actividad 5 Exposición Sobre SensoresDocument8 paginiActividad 5 Exposición Sobre SensoresMr ReptileÎncă nu există evaluări
- Como Medir Distancias Por UltrasonidoDocument3 paginiComo Medir Distancias Por UltrasonidoIsaías PérezÎncă nu există evaluări
- Ejercicio1 13 Arduino UltrasonicoDocument3 paginiEjercicio1 13 Arduino UltrasonicoGabrielÎncă nu există evaluări
- Sensor Ultrasonido - Christian MuñozDocument16 paginiSensor Ultrasonido - Christian MuñozMaria RiosÎncă nu există evaluări
- Radar ArdDocument6 paginiRadar ArdhenriipaulÎncă nu există evaluări
- Práctica 11Document15 paginiPráctica 11BELEN ESTRELLA CHAVEZÎncă nu există evaluări
- Tutorial Arduino sensor HC-SR04Document5 paginiTutorial Arduino sensor HC-SR04OSCAR ALBERTO MOLINA JUAREZÎncă nu există evaluări
- Control de nivel y temperatura con sensor ultrasónico HCSR04Document12 paginiControl de nivel y temperatura con sensor ultrasónico HCSR04celeste claroÎncă nu există evaluări
- Medir Distancia Con Arduino y Sensor de Ultrasonidos HCDocument4 paginiMedir Distancia Con Arduino y Sensor de Ultrasonidos HCjoeÎncă nu există evaluări
- Medicion de Distancia LAB 4Document12 paginiMedicion de Distancia LAB 4Ronaldo Chura FloresÎncă nu există evaluări
- Proyecto Detector de Objetos Con ArduinoDocument5 paginiProyecto Detector de Objetos Con ArduinoDavid RiedelÎncă nu există evaluări
- Medición de distancia con sensor ultrasónico HC-SR04 en ArduinoDocument8 paginiMedición de distancia con sensor ultrasónico HC-SR04 en ArduinoJACKELINE NOHEMY LOPEZ REYESÎncă nu există evaluări
- Tutorial de Arduino y Sensor Ultrasónico HC PDFDocument6 paginiTutorial de Arduino y Sensor Ultrasónico HC PDFKEVIN RAY FOX UMIYAURI HUAMANIÎncă nu există evaluări
- ACC - REM.01 AcústicaDocument5 paginiACC - REM.01 Acústicaarmando amadorÎncă nu există evaluări
- Guía Estudio Facultad de PsicologíaDocument32 paginiGuía Estudio Facultad de Psicologíaarmando amadorÎncă nu există evaluări
- Ondas EstacionariasDocument20 paginiOndas EstacionariasRonald Nilson CAÎncă nu există evaluări
- Ecología HumanaDocument14 paginiEcología HumanaNancy FaranaÎncă nu există evaluări
- Examen Diagnostico CRAB - Fisica 2-1Document1 paginăExamen Diagnostico CRAB - Fisica 2-1armando amadorÎncă nu există evaluări
- Ejercicio Clase PDFDocument1 paginăEjercicio Clase PDFarmando amadorÎncă nu există evaluări
- Porcentaje de AlumnosDocument2 paginiPorcentaje de Alumnosarmando amadorÎncă nu există evaluări
- Ley Inversa Del Cuadrado de La DistanciaDocument10 paginiLey Inversa Del Cuadrado de La Distanciaarmando amadorÎncă nu există evaluări
- MONOGRAFIADocument18 paginiMONOGRAFIALIGIA MILAGROS RODRIGUEZ OCHOAÎncă nu există evaluări
- Trabajo FinalDocument8 paginiTrabajo FinalJhimy PeraltaÎncă nu există evaluări
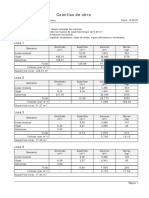
- Cuantías de ObraDocument3 paginiCuantías de ObraRosa Casal CasapÎncă nu există evaluări
- Técnicas e Instrumentos para Recolección de DatosDocument4 paginiTécnicas e Instrumentos para Recolección de DatosAnayelii MoOralezÎncă nu există evaluări
- FENOMENOS DE LA MUERTE Y MEDICINA FORENSEDocument3 paginiFENOMENOS DE LA MUERTE Y MEDICINA FORENSEJOSE FLORESÎncă nu există evaluări
- Diapositivas Teoria +soluciones+ Semana+6 2023Document29 paginiDiapositivas Teoria +soluciones+ Semana+6 2023Químicapp AntonieÎncă nu există evaluări
- Aspectos Generales de ConjuntosDocument3 paginiAspectos Generales de ConjuntosSusan AlvaradoÎncă nu există evaluări
- III - Ensayos - Laboratorio SuelosDocument9 paginiIII - Ensayos - Laboratorio SuelosAnderDelZevÎncă nu există evaluări
- Carta PsicrometricaDocument29 paginiCarta PsicrometricaJessy MarínÎncă nu există evaluări
- Cultura OrganizacionalDocument10 paginiCultura OrganizacionalDiana Isabel Quispe PumaÎncă nu există evaluări
- TallerDocument9 paginiTallerPaola OlivosÎncă nu există evaluări
- Derecho de Peticion 3542992022 OkDocument9 paginiDerecho de Peticion 3542992022 OkFelix Armando Celis ValenciaÎncă nu există evaluări
- Slidesgratis Educacion en Linea Plantillas de PowerpintDocument14 paginiSlidesgratis Educacion en Linea Plantillas de PowerpintMatías Álvarez CáceresÎncă nu există evaluări
- Desarrollo de La ISO 9004Document10 paginiDesarrollo de La ISO 9004AlfredoColanÎncă nu există evaluări
- Listado RepuestosDocument10 paginiListado RepuestosCristopher AvejaresÎncă nu există evaluări
- Resumen EjecutivoDocument15 paginiResumen Ejecutivoestefani yanquenÎncă nu există evaluări
- Correlación de Pearson y regresión linealDocument16 paginiCorrelación de Pearson y regresión linealAlexander GarciaÎncă nu există evaluări
- El Transhumanismo y Su Representacion en FrankensteinDocument4 paginiEl Transhumanismo y Su Representacion en FrankensteinsebastianÎncă nu există evaluări
- Calibración de Material Volumétrico - Práctica 1 HarrisDocument14 paginiCalibración de Material Volumétrico - Práctica 1 HarrisJuan Luis Ramírez Agudelo100% (2)
- Reseña Historica Mision CulturaDocument2 paginiReseña Historica Mision CulturaAbraham HernandezÎncă nu există evaluări
- Cuestionario Estructuras de ConcretoDocument67 paginiCuestionario Estructuras de ConcretoJonatan RamosÎncă nu există evaluări
- Metodo de Explotacion Corte y Relleno AscendenteDocument30 paginiMetodo de Explotacion Corte y Relleno Ascendenteabelkrusnik02100% (1)
- Gestión Por ProcesosDocument7 paginiGestión Por ProcesosAlexandra LadinoÎncă nu există evaluări
- Act, 1 Presaberes AutomatasDocument15 paginiAct, 1 Presaberes AutomatasAlain GenesÎncă nu există evaluări
- Prueba de Jarras planta aguaDocument17 paginiPrueba de Jarras planta aguaNestor Augusto Oyarce100% (1)
- Apoyo LinierosDocument591 paginiApoyo Linierosjosue sotoÎncă nu există evaluări
- "Arzobispo Loayza": Guia de Procedimiento para Enfermeria TecnicaDocument21 pagini"Arzobispo Loayza": Guia de Procedimiento para Enfermeria TecnicaBladimir F J MendezÎncă nu există evaluări
- Vicios de Voluntad El ErrorDocument32 paginiVicios de Voluntad El ErrorGabo Rossel100% (1)