Documente Academic
Documente Profesional
Documente Cultură
Eletropeumaticccr
Încărcat de
hecirlene vieiraDescriere originală:
Titlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Eletropeumaticccr
Încărcat de
hecirlene vieiraDrepturi de autor:
Formate disponibile
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
13. Circuitos Eletropneumáticos – (Página 63)
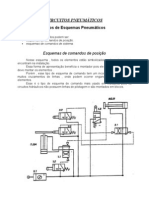
Os circuitos eletropneumáticos são esquemas de comando e acionamento que representam os componentes
pneumáticos e elétricos empregados em máquinas e equipamentos industriais, bem como a interação entre
esses elementos para se conseguir o funcionamento desejado e os movimentos exigidos do sistema
mecânico. Enquanto o circuito pneumático representa o acionamento das partes mecânicas, o circuito
elétrico representa a seqüência de comando dos componentes pneumáticos para que as partes móveis da
máquina ou equipamento apresentem os movimentos finais desejados.
Apresentamos, a seguir, os circuitos eletropneumáticos comumente utilizados em máquinas e equipamentos
industriais, detalhando seus princípios de funcionamento e apresentando as diversas técnicas empregadas
na elaboração desses circuitos, tendo sempre como referência os recursos de movimento que a máquina
deve oferecer.
Basicamente, existem quatro métodos de construção de circuitos eletropneumáticos:
intuitivo,
minimização de contatos ou seqüência mínima,
maximização de contatos ou cadeia estacionária,
lógico.
Obs.: Os circuitos eletropneumáticos foram simulados no programa Festo Fluidsim, os nomes dos arquivos .ct estão
indicados entre parênteses.
Obs.: O número das páginas indicado entre parênteses se refere à numeração original da apostilas Parker M1002-2 BR
agosto 2001.
Método Intuitivo
Na técnica de elaboração de circuitos eletropneumáticos pelo método intuitivo utiliza-se o mecanismo do
pensamento e do raciocínio humano na busca da solução de uma situação-problema apresentada. Dessa
forma, pode-se obter diferentes soluções para um mesmo problema em questão, característica principal do
método intuitivo. Eis alguns exemplos práticos de construção de circuitos eletropneumáticos pelo método
intuitivo:
Parker - Circuito 01 – (pagina 64) (01 ação simples.ct)
+24V 1
1 A1 Ao acionarmos um botão de comando S1, a haste de um cilindro
de ação simples com retorno por mola deve avançar. Enquanto
Avança mantivermos o botão acionado, a haste deverá permanecer
S1 avançada. Ao soltarmos o botão, o cilindro deve retornar à sua
posição inicial. Para solução desta situação problema, o circuito
2 pneumático apresenta um cilindro de ação simples com retorno por
Y1 Y1
mola e uma válvula direcional de 3/2 vias, normalmente fechada,
1 3 acionada eletricamente por solenóide e reposicionada por mola.
0V
Parker - Circuito 02– (pagina 65) (02 dupla ação lógica OU.ct)
Um cilindro de ação dupla deve poder ser
+24V 1 2
acionado de dois locais diferentes e distantes
Avança A Avança B entre si, como por exemplo, no comando de um
elevador de cargas que pode ser acionado tanto
S1 S2
do solo como da plataforma. Neste caso, o circuito
4 2
pneumático utiliza um cilindro de ação dupla e
Y1
uma válvula direcional de 5/2 vias, com
Y1
5 3
acionamento por servocomando eletropneumático
0V 1 e retorno por mola. É importante lembrar que o
acionamento por servocomando é indireto, ou
seja, não é o solenóide quem aciona diretamente
o carretel da válvula direcional; ele apenas abre uma passagem interna do ar comprimido que alimenta o
pórtico 1 da válvula para que esse ar, chamado de piloto pneumático, acione o carretel e mude a posição de
comando da válvula. Neste tipo de válvula a corrente do solenóide é menor.
obs. Na figura do circuito pneumático, a representação de Y1 é de um solenóide simples, e não um solenóide com
servocomando. O servocomando é representado esquematicamente por um triangulo entre a solenóide e a válvula
direcional de fluxo.
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 1
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
Parker - Circuito 03– (pagina 66) (03 dupla ação lógica E.ct)
1
Um cilindro de ação dupla deve avançar somente
+24V
quando dois botões de comando forem acionados
Avança A simultaneamente (comando bi-manual). Soltando-se
qualquer um dos dois botões de comando, o cilindro
S1
deve voltar imediatamente à sua posição inicial. Nesta
Avança B situação, o circuito pneumático é o mesmo utilizado
4 2
S2 anteriormente, empregando um cilindro de ação dupla
e uma válvula direcional de 5/2 vias com acionamento
Y1
por solenóide e reposicionamento por mola. Serão
Y1 5 3 usados, novamente, dois botões de comando
1 pulsadores, só que agora ligados em série.
0V
Esse tipo de circuito, conhecido como comando bimanual, é muito utilizado no acionamento de máquinas e equipamentos
que oferecem riscos de acidente para o operador como, por exemplo, no caso de acionamento de uma prensa
pneumática. Com os botões colocados a uma distância que não permita o acionamento com apenas uma das mãos, o
operador terá que forçosamente utilizar ambas as mãos para acionar a partida da máquina. Esse recurso oferece,
portanto, uma condição de partida segura, reduzindo consideravelmente os riscos de acidente.
É importante destacar, entretanto, que o operador deve ser sempre orientado quanto ao correto procedimento de
acionamento da máquina pois, se um dos botões S1 ou S2 for travado, a partida do equipamento poderá ser efetuada
unicamente pelo outro botão, o que vem a descaracterizar a condição de segurança desse tipo de comando bi-manual.
Um outro circuito de comando bi-manual, totalmente seguro, será apresentado e detalhado mais à frente (Circuito 08 –
(página 83)) nos próximos exemplos de construção de circuitos eletropneumáticos.
Parker - Circuito 04– (pagina 67) Válvula duplo solenóide (com memória)
Um cilindro de ação dupla deve ser acionado por dois botões. Acionando-se o primeiro botão o cilindro deve
avançar e permanecer avançado mesmo que o botão seja desacionado. O retorno deve ser comandado por
meio de um pulso no segundo botão.
Existem, na verdade, quatro possibilidades de comando do cilindro, por meio de três válvulas direcionais
diferentes. Pode-se utilizar uma válvula direcional de 5/2 acionada por dois solenóides, ou uma válvula
direcional de 5/2 acionada por duplo servocomando (válvula de impulso), ou ainda uma válvula direcional de
5/2 vias acionada por solenóide com reposicionamento por mola. As quatro alternativas diferentes de
construção do circuito eletropneumático serão apresentadas a seguir:
Circuito 04 - Solução A: (04a0 intertravamento mecanico.ct)
+24V 1 2 Empregando-se uma válvula direcional de 5/2 com
A acionamento por dois solenóides, sem mola de
AVANÇA RECUA
reposição, basta efetuar um pulso nos botões para
S1 S2
comandar os movimentos de avanço e retorno do
cilindro, não sendo necessário manter os botões
acionados para dar continuidade ao movimento.
S2 S1 4 2
Y1 Y2
Y1 Y2 5 3
0V 1
Caso os dois botões S1 e S2 forem acionados simultaneamente, embora os dois contatos normalmente abertos fecham,
os dois contatos normalmente fechados abrem e garantem que os dois solenóides Y1 e Y2 permaneçam desligados. A
montagem alternada dos contatos fechados dos botões, em série com os contatos abertos, evita que os dois solenóides
sejam energizados ao mesmo tempo, fato que poderia causar a queima de um dos solenóides, danificando o
equipamento.
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 2
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
Intertravamento elétrico (04a2 intertravamento eletrico.ct)
Neste caso os botões não possuem contatos auxiliares, o intertravamento é feito com o uso de dois relés K1
e K2.
+24V 1 2 3 4
A
Avança Recua
S1 S2 K1 K2
K2 K1
50%
50%
K1 K2 Y1 Y2 4 2
0V
Y1 Y2
5 3
1
2 3 1 4
Intertravamento eletro-mecânico (04a3 intertravamento eletro-mec.ct)
Neste caso os botões possuem contatos auxiliares, e além disso é feito o intertravamento elétrico com o uso
de dois relés K1 e K2.
+24V 1 2 3 4
Avança Recua
S1 S2 K1 K2
S2 S1
50%
50%
K2 K1
4 2
K1 K2 Y1 Y2
0V Y1 Y2
5 3
1
2 3 1 4
Circuito 04 - Solução B: (04b sem intertravamento.ct) Sem intertravamento
+24V 1 2 Utilizando uma válvula direcional de 5/2 acionada por
duplo servocomando (válvula de impulso).
AVANÇA RECUA
4 2
Obs: No circuito pneumático, Y1 e Y2 devem ser do tipo servo
comando.
Y1 Y2
Y1 Y2 Como na válvula direcional com acionamento por
5 3
0V servocomando o solenóide não movimenta diretamente o
1
carretel, apenas abre uma passagem interna de ar
comprimido para que ele pilote a válvula, não ocorre o risco,
neste caso, da queima de um dos solenóides caso ambos sejam ligados ao mesmo tempo.
Caso os dois botões S1 e S2 forem acionados ao mesmo tempo, os dois contatos normalmente abertos fecham, ligando
simultaneamente os solenóides Y1 e Y2. Os dois pilotos são abertos nas duas extremidades do carretel, agindo um
contra o outro e travando a válvula na posição, sem comprometerem os solenóides.
Como não ocorre a ação direta dos solenóides entre si, evitam-se danos ao equipamento sem a necessidade de uma
proteção elétrica para o circuito.
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 3
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
Circuito 04 - Solução C: (04c auto retenção 1 solenoide.ct) Auto-retenção
+24V 1 2 3 Utilizando uma válvula direcional de 5/2 vias com
A acionamento por solenóide e reposição por mola,
Avança com comando elétrico de auto-retenção e
S1 K1 K1 comportamento de desligar dominante. Neste
caso, a válvula direcional é reposicionada por mola
Recua e não apresenta a mesma característica de
S2 memorização da válvula de duplo solenóide,
4 2 empregada na solução B. Sendo assim, para que
se possa avançar ou retornar a haste do cilindro
K1 Y1
Y1 com um único pulso, sem manter os botões de
0V
5 3
comando acionados, é necessário utilizar um relé
auxiliar no comando elétrico para manter o
1
solenóide Y1 ligado, mesmo que o botão S1 seja
2 desacionado.
3
O circuito elétrico utilizado nesta solução C é chamado de comando de auto-retenção com comportamento de desligar
dominante porque, se os dois botões de comando S1 e S2 forem acionados ao mesmo tempo, o relé K1 permanece
desligado pelo contato do botão de comando S2. Podemos dizer que, neste caso, o botão S2 tem prioridade sobre S1
pois, se ambos forem acionados simultaneamente, prevalece como dominante a condição de desligar do contato fechado
do botão de comando S2.
Circuito 04 - Solução D: (04d auto retenção prioridade liga.ct) Auto-retenção
+24V 1 2 3 Utilizando uma válvula direcional de 5/2 vias com
acionamento por solenóide e reposição por
Avança mola, com comando elétrico de auto-retenção e
S1 K1 K1
comportamento de ligar dominante. Esta solução
Recua apresenta as mesmas características
S2 construtivas da solução anterior, considerando-
4 2 se que o circuito pneumático é o mesmo,
empregando uma válvula direcional de 5/2 vias
Y1
K1 Y1 5 3
com acionamento por solenóide e reposição por
0V 1
mola, o que exige que o comando elétrico
também seja de auto-retenção mas, agora, com
comportamento de ligar dominante.
2
3
De acordo com o que foi apresentado na solução C, a válvula direcional é reposicionada por mola e não apresenta a
mesma característica de memorização da válvula de duplo servocomando, empregada na solução B. Sendo assim, para
que se possa avançar ou retornar a haste do cilindro com um único pulso, sem manter os botões de comando acionados,
é necessário utilizar um relé auxiliar no comando elétrico para manter o solenóide Y1 ligado, mesmo que o botão S1 seja
desacionado. Acionando-se o botão S1, seu contato normalmente aberto fecha e permite a passagem da corrente elétrica
que liga a bobina do relé auxiliar K1.
O circuito elétrico utilizado nesta solução D é chamado de comando de autoretenção com comportamento de ligar
dominante porque, se os dois botões de comando S1 e S2 forem acionados ao mesmo tempo, o relé K1 é energizado
pelo contato do botão de comando S1. Podemos dizer que, neste caso, o botão S1 tem prioridade sobre S2 pois, se
ambos forem acionados simultaneamente, prevalece como dominante a condição de ligar do contato aberto do botão de
comando S1.
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 4
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
Circuito 05 – (Pág. 71) Retorno automático
Um cilindro de ação dupla deve avançar, quando for acionado um botão de partida, e este deve retornar
automaticamente, ao atingir o final do curso de avanço. Há duas possibilidades pneumáticas de solução da
situação do problema apresentado, usando duas válvulas direcionais diferentes, as quais exigirão dois
comandos elétricos distintos para que o circuito eletropneumático apresente o mesmo funcionamento.
Circuito 05 Solução A: Retorno automático - (05a retorno automatico.ct)
1 2
Utilizando uma válvula direcional de 5/2
+24V
vias com acionamento por duplo solenóide
S2
que mantém memorizado o último
Partida acionamento. Foram acrescentadas ao
S1 S2 circuito pneumático duas válvulas
reguladoras de fluxo unidirecionais, as
50%
50%
quais têm por função regular
separadamente as velocidades de avanço
4 2
Y1 Y2 e de retorno do cilindro, controlando
Y1 Y2 independentemente a quantidade de ar que
0V 5 3 sai das câmaras do cilindro. Ao contrário, o
1
ar comprimido que entra no cilindro,
proveniente da válvula direcional, passa
livremente pelas retenções incorporadas nas reguladoras de fluxo. A solução para o comando elétrico, por
sua vez, é idêntica à solução B do circuito anterior. A única diferença consiste na utilização de uma chave fim
de curso S2 ao invés do botão de comando para o retorno do cilindro.
Um novo ciclo pode ser iniciado por meio do acionamento do botão de partida S1.
Circuito 05 - Solução B: Retorno automático (05b1 retorno automatico 1 solenoide.ct) (05b2 retorno automatico 1
solenoide.ct)
Utilizando uma válvula direcional de 5/2 com acionamento por solenóide e reposição por mola. Agora, como a
válvula direcional é reposicionada por mola e não apresenta a característica de memorizar a última posição
acionada, mais uma vez deve-se utilizar um relé auxiliar como recurso para manter o solenóide Y1 ligado
mesmo após o desacionamento do botão de partida (comando elétrico de auto-retenção), conforme
apresentado nas soluções C e D do circuito 04.
Da mesma forma, o comando elétrico de auto-retenção pode ser montado nas duas versões: apresentando
comportamento de desligar dominante ou de ligar dominante.
+24V 1 2 3
S2 +24V 1 2 3
Partida
S1 K1 K1
Partida
S1 K1 K1
S2
50%
50%
S2
K1 Y1
4 2 K1 Y1
0V 0V
Y1
5 3
2 1 2
3 3
A principal diferença de funcionamento entre os dois circuitos elétricos de comando ocorre quando o botão de partida S1
é mantido acionado pelo operador. Na auto-retenção com comportamento de desligar dominante ocorrem movimentos
rápidos de ida e volta da haste do cilindro, quando esta alcança o final do curso de avanço. Isso acontece porque, como a
chave fim de curso S2 tem prioridade de comando, o solenóide Y1 é desligado quando S2 é acionada e o cilindro começa
a retornar. Assim que a haste do cilindro desaciona a chave fim de curso S2, o solenóide Y1 volta a ligar, fazendo com
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 5
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
que o cilindro torne a avançar, até acionar novamente a chave fim de curso S2 que desliga outra vez o solenóide Y1,
fazendo com que o cilindro volte a retornar e assim sucessivamente.
Já na auto-retenção com comportamento de ligar dominante, se o botão de partida é mantido acionado pelo operador,
esses movimentos sucessivos de ida e volta do cilindro, no final do curso de avanço, não ocorrem. Isso se deve ao fato
de que, como o botão de partida tem prioridade de comando, o solenóide Y1 permanece ligado, mesmo quando a chave
fim de curso S2 é acionada pela haste do cilindro. Dessa forma, o cilindro pára no final do curso de avanço até que o
operador solte o botão de partida, quando somente então a chave fim de curso S2 desliga o relé K1 e com ele o
solenóide Y1, permitindo o retorno automático do cilindro.
Parker - Circuito 06- (pág. 75) Contador
Um cilindro pneumático de ação dupla, com amortecedores de final de curso, deve avançar e retornar
automaticamente, efetuando um único ciclo, uma vez pressionado um botão de partida. Uma chave, quando
acionada, deve fazer com que o cilindro avance e retorne, em ciclo contínuo limitado, isto é, o número de
ciclos deve poder ser selecionado, de acordo com a vontade do operador.
Neste caso, o circuito pneumático utiliza, como novidade, um cilindro de ação dupla com amortecedores que
impedem golpes violentos do êmbolo contra as tampas nos finais de curso de avanço e retorno.
Mais uma vez, o circuito pneumático pode ser montado em duas versões, empregando dois tipos diferentes
de válvulas direcionais: uma acionada por duplo solenóide e outra com acionamento por solenóide e
reposição por mola. O circuito elétrico, por sua vez, apresenta, como novidade, um botão de comando com
trava (chave) e um contador eletromecânico para controlar o número de ciclos do cilindro.
Parker - Circuito 06 - Solução A: (pág. 75) (06a contador.ct) Contador
Utilizando uma válvula direcional de 5/2 vias com acionamento por duplo solenóide que mantém memorizado
o último acionamento.
A partida do cilindro pode ser efetuada por um dos dois botões de comando S1 ou S2. O botão pulsador S1
permite a partida para um único ciclo de ida e volta do cilindro.
Já o botão com trava S2 aciona a partida do cilindro em ciclo contínuo que somente será interrompido
quando o operador destravar o botão S2, ou quando o relé contador Kc registrar um determinado número de
ciclos pré-programados pelo operador.
+24V 1 2 3 4 5
A S4 S3
S1 S2 S3 S2
KC
50%
50%
S4
4 2
Y1 Y2 KC 5
0V Y1 Y2
5 3
1
2
Uma nova partida pode ser efetuada para ciclo único, através do acionamento do botão S1. O ciclo contínuo, entretanto,
somente pode ser reiniciado com o destravamento do botão S2 para zerar a contagem do relé Kc e fechar novamente
seu contato normalmente fechado que abriu encerrando os ciclos préprogramados. Destravando o botão S2, seu contato
fechado energiza a bobina Kcr (R1 e R2) cuja função é retornar a zero o mostrador do relé contador, voltando seus
contatos à posição inicial.
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 6
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
Parker - Circuito 06 - Solução B: - (pág. 75) (06b contador.ct) Contador
Utilizando uma válvula direcional 5/2 com acionamento por solenóide e reposição por mola. Como foi
detalhado nos circuitos anteriores, a opção por este tipo de válvula exige a utilização de relés auxiliares com
a função de auto-retenção, considerando-se que a válvula não memoriza a posição quando o solenóide é
desligado.
Da mesma forma demonstrada na solução A, a partida do cilindro pode ser efetuada por um dos dois botões
de comando S1 ou S2. O botão pulsador S1 permite a partida para um único ciclo de ida e volta do cilindro,
enquanto que o botão com trava (chave) S2 aciona a partida do cilindro em ciclo contínuo que somente será
interrompido quando o operador destravar o botão S2, ou quando o relé contador KC registrar um
determinado número de ciclos pré-programados pelo operador.
+24V 1 2 3 4 5 8
S1 S2 K1 K1 S3 K1 S2
S4 S3
KC
S4
58%
58%
KC 5
K2
K1 Y1 K2
0V
Y1
3 2 2
4
6
Uma nova partida pode ser efetuada para ciclo único, através do acionamento do botão S1. O ciclo contínuo, por sua vez,
somente pode ser reiniciado com o destravamento da chave S2 para zerar a contagem do relé KC e fechar novamente
seu contato 11/12 que abriu encerrando os ciclos pré-programados.
Destravando a chave S2, seu contato fechado 21/22 energiza a bobina KCr (R1, R2) cuja função é retornar a zero o
mostrador do relé contador, voltando seus contatos à posição inicial.
Parker - Circuito 07 – (página 79) Temporizador
Um cilindro de ação dupla deve avançar, quando for acionado um botão de partida, permanecer parado por 4
segundos no final do curso de avanço e retornar automaticamente. Um botão de emergência deve encerrar
instantaneamente o ciclo e fazer com que o cilindro volte imediatamente ao ponto de partida, seja qual for a
sua posição.
Mais uma vez, o circuito pneumático pode ser montado em duas versões, empregando dois tipos diferentes
de válvulas direcionais: uma acionada por duplo solenóide e outra com acionamento por solenóide e
reposição por mola. O circuito elétrico, por sua vez, apresenta, como novidade, um sensor de proximidade
indutivo sem contato físico, no lugar da chave fim de curso com acionamento por rolete mecânico, utilizada
nos circuitos anteriores. Outra novidade é a utilização de um relé temporizador, empregado para atrasar o
comando e controlar o tempo de parada do cilindro exigido no problema.
Quanto ao sistema de emergência, que quando acionado deve retornar imediatamente o cilindro à posição
inicial, devido às diferentes características de funcionamento entre as válvulas direcionais utilizadas, serão
apresentadas duas configurações distintas nas soluções A e B, mas que exercem a mesma função.
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 7
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
circuito 07 - Solução A: - (Página 79) (07a0 temporizador.ct) Temporizador
Utilizando uma válvula direcional de 5/2 vias com acionamento por duplo solenóide que mantém memorizado
o último acionamento.
+24V 1 2 4 5 6 7
A S2
S1 K1 K2 S3 K2
S2
K2 S1
S4
50%
50%
Y1 K1 5 Y2 K2
4 2
0V
Y1 Y2
5 3
4 1 5 1
7
Enquanto o sistema de emergência estiver ativado, após se pressionar S3, o operador não poderá iniciar um novo ciclo
pois o contato 11/12 de K2 permanece aberto e não permite que o solenóide Y1 seja energizado, mesmo com o
acionamento do botão de partida S1. Portanto, para que um novo ciclo possa ser iniciado, é necessário desligar o
sistema de emergência, por meio do acionamento do botão S4. Acionando-se o botão S4, seu contato normalmente
fechado abre e interrompe a passagem da corrente elétrica, desligando a bobina do relé auxiliar K2. Quando o relé K2 é
desligado, seu contato 31/34 volta a abrir e desliga a auto-retenção do relé K2, permitindo que o botão S4 seja
desacionado e garantindo o desligamento da bobina do relé K2. O contato 21/24 de K2 também volta a abrir, desligando
o solenóide Y2. O contato 11/12 de K2 volta a fechar, permitindo que um novo ciclo seja iniciado, a partir do momento em
que o operador acione novamente o botão de partida S1.
(07a1 temporizador mod.ct) Temporizador
+24V 1 2 4 5 6 7 8
S2
S1 K3 K1 K2 S3 K2
S2
K2
S4
29%
21%
Y1 K3 K1 5 Y2 K2
4 2
0V
Y1 Y2
5 3
4 5 6 1 1
8
Nesta modificação, o contato auxiliar NF do botão S1 na linha 3 foi eliminado pois não era necessário, um relé K3 foi
adicionado para fazer a ligação do temporizado pois a corrente do sensor indutivo não é capaz de acionar o
temporizador.
No circuito da parada de emergência, S3 agora HABILITA o circuito S4 é a PARADA. Neste caso o relé K2 fica ligado
enquanto o circuito está funcionando. Com esta modificação os requisitos de segurança são atendidos, ou seja, a
PARADA deve ser feita com um botão NF.
Observe para as duas alternativas como funciona o circuito se o botão S1 for mantido pressionado continuamente. O
comportamento modifica devido a eliminação do contato auxiliar NF do botão S1.
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 8
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
circuito 07 - Solução B: - (Pagina 81) (07b temporizador.ct) Temporizador
Utilizando uma válvula direcional de 5/2 com acionamento por solenóide e reposição por mola.
+24V 1 2 3 4
S1 K1 S2 K1
A S2
K2
50%
50%
S0
K1 K2 5 Y1 4 2
0V
Y1
5 3
1
2 1
4
Como a válvula direcional é acionada por solenóide apenas de um lado e reposicionada por mola, o sistema de parada
de emergência é, neste caso, facilmente executado pelo contato fechado do botão com trava S0. Seja qual for a posição
do cilindro, quando o botão de parada de emergência S0 for acionado, seu contato normalmente fechado abre e
interrompe a passagem da corrente elétrica para todo o circuito. Dessa forma, tudo é desligado, inclusive o solenóide Y1
da válvula direcional cuja mola empurra o carretel para a esquerda, fazendo com que a haste do cilindro volte
imediatamente a sua posição inicial, ou seja, no final do curso de retorno.
Enquanto o sistema de emergência estiver ativado, o operador não poderá iniciar um novo ciclo pois o contato 11/12 do
botão com trava S0 permanece aberto desenergizando todo o circuito. Portanto, para que um novo ciclo possa ser
iniciado, é necessário desligar o sistema de emergência, simplesmente destravando o botão S0. Quando o botão S0 é
destravado, seu contato 11/12 volta a fechar, alimentando o circuito e permitindo que um novo ciclo seja iniciado, a partir
do momento em que o operador acione novamente o botão de partida S1.
Parker - Circuito 08 – (página 83) (bimanual, corrigido a parada de emergência)
Um cilindro de ação dupla somente deverá avançar quando seus dois botões de partida forem acionados
simultaneamente (Comando bi-manual). Se a diferença de tempo entre os acionamentos dos dois botões for
maior do que 2 segundos, o cilindro não deverá partir. O retorno deverá ocorrer automaticamente uma vez
que a pressão pré-programada de trabalho seja alcançada. Um sistema de emergência, quando acionado,
deverá permitir que o cilindro volte imediatamente à sua posição inicial.
A novidade neste circuito é a presença de um pressostato que deverá controlar a pressão de avanço do
cilindro. No caso, por exemplo, de uma prensa de cunhagem de moedas onde a força de avanço do martelo,
acionado pela haste do cilindro, deve ser compatível com a resistência do material a ser cunhado, quando o
martelo da prensa atingir a pressão predeterminada no pressostato, este emite um sinal para o retorno
imediato do cilindro.
É importante destacar que, na prática, o pressostato deve ser regulado com uma pressão intermediária,
maior que a pressão mínima para avanço do cilindro e, obrigatoriamente, menor que a pressão servida no
circuito pelo regulador da unidade de conservação. Caso contrário, se o pressostato for ajustado com uma
pressão inferior à mínima exigida para o movimento do cilindro, assim que a câmara traseira for pressurizada,
o pressostato emitirá o sinal de retorno e o cilindro não chegará sequer a partir. Por outro lado, se o
pressostato for regulado com uma pressão maior que a servida para o circuito pneumático, quando a haste
do cilindro alcançar o final do curso de avanço e a pressão na câmara traseira atingir o valor máximo, o valor
dessa pressão será insuficiente para inverter os contatos do pressostato e o cilindro interromperá o ciclo de
movimentos, com a haste permanecendo parada no final do curso de avanço.
O comando bi-manual, detalhado neste circuito, é totalmente seguro pois evita que o operador trave um dos
botões de partida e passe a trabalhar somente com uma das mãos para acionar o outro botão.
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 9
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
Mais uma vez, o circuito pneumático pode ser montado em duas versões, empregando dois tipos diferentes
de válvulas direcionais: uma acionada por duplo solenóide e outra com acionamento por solenóide e
reposição por mola.
Quanto ao sistema de emergência, que quando acionado deve retornar imediatamente o cilindro à posição
inicial, novamente, devido às diferentes características de funcionamento entre as válvulas direcionais
utilizadas, serão apresentadas duas configurações distintas nas soluções A e B, mas que exercem a mesma
função.
circuito 08 - Solução A: (Página 84) (08a0 bimanual.ct) Bimanual com temporização
Utilizando uma válvula direcional de 5/2 com acionamento por duplo solenóide que memoriza o último
acionamento.
+24V 1 2 3 4 5 6 7 8 9 10 11 12 13
21 21 11 21 31 PARAR 1 3 31
Bi manual 21
13 13 11 1 1 K1 K4 K7 K5 K5 K6 S5 K6
S1 S2 K1 K2 24 24 14 24 34 24 14 34
21 11
14 14 14 14 11
K2 K5
S4 14
24 12
11 12 HABILITAR 1 1 S3
11
K3 K6 S6
12 12 12
A1
K1 K2 K3 2 K4 Y1 K5 Y2 K6 K7
A2
0V
3 4 5 6 6 8 6 10 7
5 5 9 12
S4
S3
2
30%
49%
1 3
4 2
Y1 Y2
5 3
1
Enquanto o sistema de emergência estiver ativado, o operador não poderá iniciar um novo ciclo pois o contato 11/12 de
K6 permanece aberto e não permite que o solenóide Y1 seja energizado, mesmo com o acionamento dos dois botões de
partida S1 e S2. Portanto, para que um novo ciclo possa ser iniciado, é necessário desligar o sistema de emergência, por
meio do acionamento do botão S6.
Acionando-se o botão S6, seu contato 11/12 abre e interrompe a passagem da corrente elétrica, desligando o relé K6.
Quando K6 é desligado, seu contato 31/34 volta a abrir e desliga a auto-retenção de K6, permitindo que o botão S6 seja
desacionado e garantindo o desligamento de K6. O contato 21/24 de K6 também volta a abrir, desligando o solenóide Y2.
O contato 11/12 de K6 volta a fechar, permitindo que um novo ciclo seja iniciado, a partir do momento em que o operador
acione simultaneamente os dois botões de partida S1 e S2.
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 10
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
Modificação (08a1 bimanual mod.ct)
+24V 1 2 3 4 5 6 7 8 9 10 11 12 13
21 21 11 21 31 HABILITAR 1 3 31
Bi manual 11
13 13 11 1 1 K1 K4 K7 K5 K5 S5 K6
K6
S1 S2 K1 K2 24 24 14 24 34 14 34
21 11 12
14 14 14 14 11
K2 K5
S4 14
24 12
11 21 12 PARAR 1 1 S3
K3 K6 S6
12 24 12
A1
K1 K2 K3 2 K4 Y1 K5 Y2 K6 K7
A2
0V
3 4 5 6 6 8 10 6 7
5 5 9 12
S4
S3
2
30%
49%
1 3
4 2
Y1 Y2
5 3
1
Nesta modificação, S5 agora HABILITA o circuito S6 é a PARADA. Neste caso o relé K2 fica ligado enquanto o circuito
está funcionando. Com esta modificação os requisitos de segurança são atendidos, ou seja, a PARADA deve ser feita
com um botão NF
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 11
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
circuito 08 - Solução B: (Pagina 86) (08b bimanual.ct)
Utilizando uma válvula direcional de 5/2 vias com acionamento por solenóide e reposição por mola.
+24V 1
PARAR: aberto
S0 HABILITAR: fechado
2 3 4 5 6 7 8 9
21 21 11 21
Bi manual
13 13 11 1 1 K1 K4 K4 K7 K5
S1 S2 K1 K2 24 24 14 24
21 11
14 14 14 14 11
K2 K5
24 S4 11
11 12
11 12 S3
K3
K4
12
21
K5
12
A1 22
K1 K2 K3 2 Y1 K5 K7
K4
0V A2
3 4 5 3 6 5 9 8
5 5 7 7
S4
S3
2
30%
49%
1 3
4 2
Y1
5 3
1
Enquanto o sistema de emergência estiver ativado, o operador não poderá iniciar um novo ciclo pois o contato 11/12 do
botão com trava S0 permanece aberto desenergizando todo o circuito. Portanto, para que um novo ciclo possa ser
iniciado, é necessário desligar o sistema de emergência, simplesmente destravando o botão S0.
Quando o botão S0 é destravado, seu contato 11/12 volta a fechar, alimentando o circuito e permitindo que um novo ciclo
seja iniciado, a partir do momento em que o operador acione simultaneamente os botões de partida S1 e S2.
Parker - Circuito 09 – (página 88) (09_0 botão pulsador.ct) Botão pulsador
Um único botão pulsador deve acionar, alternadamente, os movimentos de avanço e retorno de um cilindro
de ação dupla, de maneira que: acionando-se o botão, pela primeira vez, o cilindro avança; soltando-se o
botão o cilindro permanece avançado; acionando-se o botão, pela segunda vez, o cilindro retorna; e soltando-
se o botão, novamente, o cilindro permanece recuado.
Este problema seria facilmente resolvido mediante a utilização de um botão com trava, mecanicamente
acionado por um divisor binário, também conhecido como flip-flop. Entretanto, como o enunciado do
problema exige um botão de comando do tipo pulsador, com retorno por mola, a solução encontrada é
empregar contatos de relés.
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 12
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
Quando o comando elétrico é energizado, a corrente permanece interrompida em todo o circuito, mantendo
tudo desligado. Dessa forma, a mola da válvula direcional mantém o carretel acionado para a esquerda e a
haste do cilindro recuada.
+24V 1 6 7 8
1 31 31 41
S1
K1 K3 K3
Liga/Desliga 4
2 3 4
34 34 44
11 11 21 11 21
21
K3 K1 K3 K2 K2
K4
12 14 24 14
24
22
47%
49%
11 21
K4 K1
12 22
A1 A1 A1
K1 K2 K4 K3 Y1
4 2
0V A2 A2 A2
Y1
5 3
3 2 4 1 1 3
6 5 6 7 1
8
Obs: O relé K4 pode ser eliminado do circuito sem prejuízo para seu funcionamento. Projete o circuito sem K4 e teste na
bancada.
(09_1 botão pulsador modificado.ct)
+24V 1 5 6 7
1 41
31 31
S1
A
K1 K3 K3
Liga/Desliga 4
2 3
34 34 44
11 11 21 21
31
K3 K1 K3 K2
13 K2
14 24 24
33
47%
49%
11 21
K2 K1
13 23
A1 A1 A1
K1 K2 K3 Y1
4 2
0V A2 A2 A2
Y1
5 3
3 2 1 4 1 3
5 5 6 1
7
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 13
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
Parker – Circuito 10 (página 90) A + B + A – B –
Dois cilindros pneumáticos de ação dupla devem avançar e retornar, obedecendo a uma seqüência de
movimentos predeterminada. Acionando-se um botão de partida, o cilindro A deve avançar. Quando A chegar
ao final do curso, deve avançar o cilindro B. Assim que B atingir o final do curso, deve retornar o cilindro A e,
finalmente, quando A alcançar o final do curso, deve retornar o cilindro B.
Existem várias maneiras de representar uma seqüência de movimentos de cilindros pneumáticos. As mais
usadas são: a forma de tabela, o diagrama trajeto-passo e a representação abreviada.
Forma de Tabela
Passo Movimento Comando
1º O cilindro A avança Botão de partida
2º O cilindro B avança Sensor óptico
3º O cilindro A retorna Sensor Capacitivo
4º O cilindro B retorna Sensor Indutivo
Na forma de tabela, descreve-se, resumidamente, o que ocorre em cada passo de movimento da seqüência,
destacando o comando efetuado. Assim, no primeiro passo, quando o botão de partida for acionado, o
cilindro A avança. No segundo passo, quando um sensor óptico for ativado no final do movimento do primeiro
passo, o cilindro B avança.
No terceiro passo, quando um sensor capacitivo acusar o final do movimento do segundo passo, o cilindro A
retorna. Finalmente, no quarto passo, quando um sensor indutivo for acionado no final do movimento do
passo anterior, o cilindro B retorna e encerra o ciclo de movimentos da seqüência.
Diagrama Trajeto-Passo
O diagrama trajeto-passo representa, sob a forma de gráfico, os movimentos que um cilindro realiza em cada
passo, durante um ciclo de trabalho. Sendo assim, no primeiro passo, o cilindro A avança, enquanto B
permanece parado no final do curso de retorno. No segundo passo, o cilindro B avança, enquanto que A
permanece parado no final do curso de avanço. No terceiro passo, o cilindro A retorna, enquanto que B
permanece parado no final do curso de avanço. No quarto e último passo, o cilindro B retorna, enquanto que
A permanece parado no final do curso de retorno.
Representação Abreviada
A+B+A–B–
A representação abreviada é a mais utilizada devido à sua simplicidade. As letras maiúsculas representam os
cilindros utilizados no circuito pneumático. O símbolo ( + ) é empregado para representar o movimento de
avanço de um cilindro, enquanto que o símbolo ( – ) o de retorno. Dessa forma, A + representa que o cilindro
A avança, B + que o cilindro B avança, A – que o cilindro A retorna e B – que o cilindro B retorna.
Se dois movimentos de dois cilindros diferentes ocorrem ao mesmo tempo, as letras que representam esses
cilindros são escritas entre parênteses, de uma das seguintes maneiras:
A + B + (A – B –) ou A + B + (A B) –
Nos dois casos, os parênteses representam que o retorno dos cilindros A e B ocorrem simultaneamente.
Voltando ao circuito 10, mais uma vez serão apresentadas duas soluções pneumáticas para o problema: uma
utilizando válvulas direcionais com acionamento por duplo servocomando e, a outra, empregando válvulas
direcionais acionadas por servocomando com reposição por mola.
Com relação ao circuito elétrico de comando, a novidade é a aplicação de diferentes tipos de sensores de
proximidade sem contato físico, empregados no lugar das já tradicionais chaves fim de curso. É importante
destacar, ainda, que devido à baixa corrente de saída dos sensores de proximidade, não é conveniente
utilizá-los para energizar diretamente bobinas de solenóides. Dessa forma, torna-se indispensável o uso de
relés auxiliares que deverão receber os sinais dos sensores e dar prosseguimento ao comando dos demais
componentes elétricos empregados no circuito.
Com relação ao circuito elétrico de comando, a novidade é a aplicação de diferentes tipos de sensores de
proximidade sem contato físico, empregados no lugar das já tradicionais chaves fim de curso. É importante
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 14
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
destacar, ainda, que devido à baixa corrente de saída dos sensores de proximidade, não é conveniente
utilizá-los para energizar diretamente bobinas de solenóides. Dessa forma, torna-se indispensável o uso de
relés auxiliares que deverão receber os sinais dos sensores e dar prosseguimento ao comando dos demais
componentes elétricos empregados no circuito.
circuito 10 - Solução A: (Página 91) (10a1 a+b+a-b-.ct) A + B + A – B –
Utilizando uma válvula direcional de 5/2 vias com acionamento por duplo servocomando que memoriza o
último acionamento.
+24V 1 2 4 5 6 8
Inicio
S1 K1 S5 K2
S3 S2
S4
Y1 K1 Y3 Y2 K2 Y4
0V
4 8
A S2 S3 B S4 S5
50%
50%
50%
50%
4 2 4 2
Y1 Y2 Y3 Y4
5 3 5 3
1 1
Um novo ciclo de movimentos pode ser iniciado mediante o acionamento do botão de partida S1.
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 15
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
circuito 10 - Solução B: (Pagina 92) (10b1 a+b+a-b-.ct) A + B + A – B –
Utilizando uma válvula direcional de 5/2 vias com acionamento por servocomando e reposição por mola.
+24V 1 2 3 4 5 6 7 9
Inicio
10
S1 K1 K1 K4 K2 K2
S2 S3
S4
S5 K3
K1 Y1 K2 Y2 K3 K4
0V
2 5 4 4
3 6
A S2 S3 B S4 S5
50%
50%
50%
50%
4 2 4 2
Y1 Y2
5 3 5 3
1 1
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 16
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
circuito 11 - Solução : (Página 104) (11 a+a-b+b-.ct) A + A – B + B –
Ao acionar um botão de partida, dois cilindros de ação dupla devem se movimentar, respeitando a sequencia
de movimentos A + A – B + B –
1º Passo
Identificar se a sequencia é direta ou indireta.
A + A – | B + B –
|
Sequencia indireta
2º Passo
Como a sequencia é indireta, dividi-la em setores secundários.
A + | A – B + | B –
I | II | I
2 setores secundários
Observe que na divisão da sequencia em setores secundários, o cilindro A deverá avançar no setor I e
retornar no setor II. O cilindro B, por sua vez, deverá avançar no setor II e retornar no setor I.
Construindo um quadro com a sequencia dos acionamentos para comando dos movimentos e mudança da
alimentação elétrica entre os setores, teremos:
Passo Comando Acionamento Setor
1 Botão de partida S1 Avanço do cilindro A I
2 Chave fim de curso S2 Mudança de alimentação do setor I para o II Rede
3 Setor secundário II energizado Retorno do cilindro A II
4 Chave fim de curso S3 Avanço do cilindro B II
5 Chave fim de curso S4 Mudança de alimentação do setor II para o I rede
6 Setor secundário I energizado Retorno do cilindro B I
7 Chave fim de curso S5 Desliga retorno do cilindro B - Fim do ciclo I
3Passo
Construir o circuito pneumático, utilizando válvulas direcionais de 5/2 vias com acionamento por duplo
servocomando, e o circuito elétrico, aplicando o método de minimização de contatos.
Descrição do funcionamento
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 17
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
Quando o botão S1 é acionado a solenoide Y1 é energizada e o cilindro A avança, ao chegar no fim do
trajeto o fim de curso S2 é acionado fazendo com que o Relé de comando K1 seja energizado e comute seus
contatos habilitando o ramo 1 e desabilitando o 2, com isso, a solenoide Y2 é energizada e o cilindro A
retorna. Ao voltar à sua posição inicial o rolete S3 é acionado e faz com que a solenoide Y3 seja energizada
e o cilindro B avance, no fim do seu trajeto o cilindro aciona o rolete S4, que por sua vez faz com que o relé
K1 seja desenergizado e, tendo em vista que o rolete S5 não está acionado, a solenoide Y4 é energizada
fazendo com que o cilindro B retorne a sua posição inicia, finalizando o ciclo.
circuito 12 - Solução : (Página 107) (12 a+b+b-a-.ct) A + B + B – A –
Numa furadeira pneumática, o cilindro A é utilizado para fixar a peça a ser usinada e o cilindro B para
movimentar o cabeçote da furadeira. Ao acionar um botão de partida, o cilindro A avança e prende a peça, o
cilindro B avança e realiza a furação, o cilindro B retorna e retira a broca da peça e, finalmente, o cilindro A
retorna e solta a peça.
1º Passo Identificar se a seqüência é direta ou indireta. A + B + | B – A – Sequencia indireta
2º Passo Como a sequencia é indireta, dividi-la em setores secundários.
A + B + | B – A –
I | II
2 setores secundários.
Observe que na divisão da sequencia em setores secundários, os cilindros A e B deverão avançar no setor I
e retornar no setor II.
Construindo-se o quadro com a sequencia dos acionamentos para comando dos movimentos e mudança da
alimentação elétrica entre os setores, teremos:
Passo Comando Acionamento Setor
1 Botão de partida S1 Mudança de alimentação do setor II para o I Rede
2 Setor secundário I energizado Avanço do cilindro A I
3 Chave fim de curso S2 Retorno do cilindro B I
4 Chave fim de curso S3 Mudança de alimentação do setor I para o II rede
5 Setor secundário II energizado Avanço do cilindro B II
6 Chave fim de curso S4 Retorno do cilindro A II
7 Chave fim de curso S5 Desliga retorno do cilindro B - Fim do ciclo II
3º Passo
Construir o circuito pneumático, utilizando válvulas direcionais de 5/2 vias com acionamento por duplo
servocomando, e o circuito elétrico, aplicando o método de minimização de contatos.
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 18
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
circuito 13 - Solução A: (Página 110) (131 a+c+b+(b-c-)a-.ct) A + C + B + ( B – C – ) A –
Quando um botão de partida for acionado, três cilindros pneumáticos de ação dupla deverão avançar e
retornar, respeitando a seguinte sequencia de movimentos: A + C + B + ( B – C – ) A –
A novidade, nessa sequencia é o movimento simultâneo de dois cilindros. Os cilindros B e C deverão retornar
ao mesmo tempo, conforme indicado pelos parênteses utilizados na representação abreviada da sequencia
de movimentos.
1º Passo
Identificar se a seqüência é direta ou indireta.
A+C+B+|(B–C–)A–
Sequencia indireta
2º Passo
Como a sequencia é indireta, dividi-la em setores secundários.
A + C + B + | ( B – C – ) A –
I | II
2 setores secundários
Observe que na divisão da seqüência em setores secundários, os cilindros A, C e B deverão avançar
individualmente no setor I e retornar no setor II, sendo que B e C retornam juntos e, em seguida, o A.
Construindo-se o quadro com a sequencia dos acionamentos para comando dos movimentos e mudança da
alimentação elétrica entre os setores, teremos:
Passo Comando Acionamento Setor
1 Botão de partida S1 Mudança de alimentação do setor II para o I Rede
2 Setor secundário I energizado Avanço do cilindro A I
3 Chave fim de curso S2 Retorno do cilindro C I
4 Chave fim de curso S3 Avanço do cilindro B I
5 Chave fim de curso S4 Mudança de alimentação do setor I para o II rede
6 Setor secundário II energizado Retorno do cilindro B e C II
7 Chave fim de curso S5 e S6 Retorno do cilindro A II
8 Chave fim de curso S7 Desliga retorno do cilindro B - Fim do ciclo II
3º Passo
Construir o circuito pneumático, utilizando válvulas direcionais de 5/2 vias com acionamento por duplo
servocomando, e o circuito elétrico, aplicando o método de minimização de contatos.
Component Description Designation 0 5 10 15 20
100
Double acting cylinder A 50
mm
100
Double acting cylinder B 50
mm
100
Double acting cylinder C 50
8 mm
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 19
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
Circuito 14 (Página 113) (14 a+b+a-a+b-a-.ct) A + B + A - A + B - A -
Quando um botão de partida for acionado, dois cilindros pneumáticos de ação dupla deverão avançar e
retornar, respeitando a seguinte sequencia de movimentos: A + B + A - A + B - A -
A novidade, nessa sequencia é que um dos cilindros, no caso o A, realiza dois movimentos de avanço e dois
de retorno dentro do mesmo ciclo.
1º Passo
Identificar se a sequencia é direta ou indireta.
A + B + A - | A + B – A –
A A | A A
Seqüência indireta
2º Passo
Como a seqüência é indireta, dividi-la em setores secundários.
A + B + | A – | A + B – | A –
I | II | III | IV
4 setores secundários
Observe que na divisão da sequencia em setores secundários, o cilindro A avança duas vezes, uma no setor
I e outra no setor III, e retorna duas vezes, uma no setor II e outra no setor IV. O cilindro B, por sua vez,
avança no setor I e retorna no III.
Construindo-se o quadro com a sequencia dos acionamentos para comando dos movimentos e mudança da
alimentação elétrica entre os setores, teremos:
Passo Comando Acionamento Setor
1 Botão de partida S1 Mudança de alimentação do setor IV para o I Rede
2 Setor secundário I energizado Avanço do cilindro A pela 1ª vez I
3 Chave fim de curso S2 – 1ª vez Avanço do cilindro B I
4 Chave fim de curso S3 Mudança de alimentação do setor I para o II rede
5 Setor secundário II energizado Avanço do cilindro A pela 1ª vez II
6 Chave fim de curso S4 – 1ª vez Mudança de alimentação do setor II para o III rede
7 Setor secundário III energizado Avanço do cilindro A pela 2ª vez III
8 Chave fim de curso S2 – 2ª vez Retorno do cilindro B III
9 Chave fim de curso S5 Mudança de alimentação do setor III para o IV rede
10 Setor secundário IV energizado Retorno do cilindro A – 2ª vez IV
11 Chave fim de curso S4 – 2ª vez Desliga retorno do cilindro A - Fim do ciclo IV
3º Passo
Construir o circuito pneumático, utilizando válvulas direcionais de 5/2 vias com acionamento por duplo
servocomando, e o circuito elétrico, aplicando o método de minimização de contatos.
S4 S2 S5 S3
A B
Component Description Designation 0 5 10 15 20 25 30
100
80
40%
40%
40%
40%
Double acting cylinder A 60
40
20
4 2 4 2 mm
100
80
Y1 Y2 Y3 Y4 Double acting cylinder B 60
5 3 5 3 40
1 1 20
mm
1
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 20
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
+24V 1 2 3 4 5 6 7 8 9 12 13
K1 K1
S1 K1 S2 S3 K2 S4 K5 K3 S5
K2 K2 K5
K6 K1 K2 K3
K3 K3
K3 K3 K4 K1 K2 K4
K1 K4 K2 K5 K3 K6 Y1 Y3 Y2 Y4
0V
13 2 14 12 5 16 7 11 8 1
4 17 16 7 12 9
12 11 10
15 13
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 21
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
Método de Maximização de Contatos pag. 118
---------
Parker - Circuito 15 – (pág. 120) A + A - B + B -
Ao acionar um botão de partida, dois cilindros de ação dupla devem se movimentar, respeitando a seqüência
de movimentos A + A - B + B -
1º Etapa
Identificar se a seqüência é direta ou indireta.
A+A-|B+B-
Seqüência indireta
2º Etapa
Como a seqüência é indireta, dividi-la em setores ou passos.
A+ | A- |B+ |B- |
I | II | III | IV |
4 passos
Observe que na divisão da seqüência em setores, o cilindro A deverá avançar no passo I e retornar no passo
II. O cilindro B, por sua vez, deverá avançar no passo III e retornar no passo IV. Construindo um quadro com
a seqüência dos acionamentos para comando dos movimentos e mudança da alimentação elétrica entre os
setores, teremos:
Passo Comando Acionamento Setor
1º Botão de partida S1 Avanço do cilindro A K1
2º Chave fim de curso S2 Retorno do cilindro A K2
3º Chave fim de curso S3 Avanço do cilindro B K3
4º Chave fim de curso S4 Retorno do cilindro B K4
5º Chave fim de curso S5 Desliga a cadeia estacionária - Fim do ciclo K5
Observe que, embora a divisão da seqüência tenha indicado 4 passos, serão utilizados 5 relés auxiliares: um
para cada passo e um para efetuar o desligamento da cadeia estacionária, no final do ciclo.
No primeiro passo, um botão de partida S1 liga o relé K1 o qual deverá efetuar três funções:
- a auto-retenção do próprio relé K1;
- a habilitação do próximo relé auxiliar, no caso K2;
- e o avanço do cilindro A, primeiro movimento da seqüência.
Somente quando o primeiro passo tiver ocorrido, no final do curso de avanço do cilindro A, a chave fim de
curso S2 confirmará o término do movimento e energizará o relé K2. Assim como ocorreu com K1, K2
também deverá efetuar três funções:
- a auto-retenção do próprio relé K2;
- a habilitação do próximo relé auxiliar, no caso K3;
- e o retorno do cilindro A, segundo movimento da seqüência.
Quando o segundo passo tiver ocorrido, no final do curso de retorno do cilindro A, a chave fim de curso S3
confirmará o término do movimento e energizará o relé K3. Assim como ocorreu com K1 e K2, K3 também
deverá efetuar três funções:
- a auto-retenção do próprio relé K3;
- a habilitação do próximo relé auxiliar, no caso K4;
- e o avanço do cilindro B, terceiro movimento da seqüência.
Da mesma forma, quando o terceiro passo tiver ocorrido, no final do curso de avanço do cilindro B, a chave
fim de curso S4 confirmará o término do movimento e energizará o relé K4. Assim como ocorreu com K1, K2
e K3, K4 também deverá efetuar três funções:
- a auto-retenção do próprio relé K4;
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 22
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
- a habilitação do próximo relé auxiliar, no caso K5;
- e o retorno do cilindro B, quarto e último movimento da seqüência.
Quando o último passo tiver ocorrido, no final do curso de retorno do cilindro B, a chave fim de curso S5
confirmará o término do movimento e energizará o relé K5. Ao contrário do que ocorreu com os quatro relés
anteriores, K5 deverá efetuar apenas uma função, ou seja, desligar o primeiro relé da cadeia estacionária, no
caso K1. Como K5 depende de K4, K4 depende de K3, K3 depende de K2 e K2 depende de K1, devido às
habilitações sucessivas de um para o outro, assim que K1 é desligado, todos o são e a cadeia estacionária
encontra-se novamente na posição inicial, encerrando o ciclo de movimentos da seqüência.
3º Etapa
Construir o circuito pneumático e o circuito elétrico de comando, aplicando o método passo-a-passo.
Parker - Circuito 15 - Solução A: (pág. 121) sequencia A+A-B+B-
Utilizando válvulas direcionais de 5/2 vias acionadas por servocomando com reposição por mola.
A S3 S2 B S5 S4
Component Description Designation 0 1 2 3 4 5 6 7 8 9 10
100
50%
50%
50%
50%
Double acting cylinder A 50
4 2 4 2 mm
100
Y1 Y2 Double acting cylinder B 50
5 3 5 3
1 1
mm
+24V 1 2 3 4 5 6 7 8 9 10 11
Inicio
S1 K1 S2 K2 S3 K3 S4 K4 S5 K1 K3
K4
K5 K1 K2 K3 K4 K2
K1 K2 K3 K4 K5 Y1 Y2
0V
2 10 4 6 11 8 1
3 5 7 9
10 11
Parker - Circuito 15 - Solução B (Pág. 123) sequencia A+A-B+B-
Utilizando válvulas direcionais de 5/2 vias com acionamento por duplo servocomando.
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 23
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
50% A S3 S2 B S5 S4
50%
50%
50%
Component Description Designation 0 1 2 3 4 5 6 7 8 9 10
100
80
Double acting cylinder 60
A
40
4 2 4 2 20
mm
100
Y1 Y2 Y3 Y4 80
5 3 5 3 Double acting cylinder B 60
40
1 1 20
mm
+24V 1 2 3 4 5 6 7 8 9 10 11 12 13
Inicio
S1 K1 S2 K2 S3 K3 S4 K4 S5 K1 K2 K3 K4
K5 K1 K2 K3 K4 K2 K4
K1 K2 K3 K4 K5 Y1 Y2 Y3 Y4
0V
2 10 4 6 12 8 1
3 5 7 9
10 11 12 13
Circuito 16 (Pág. 125)
Numa furadeira pneumática, o cilindro A é utilizado para fixar a peça a ser usinada e o cilindro B para
movimentar o cabeçote da furadeira. Ao acionar um botão de partida, o cilindro A avança e prende a peça, o
cilindro B avança e realiza a furação, o cilindro B retorna e retira a broca da peça e, finalmente, o cilindro A
retorna e solta a peça. A seqüência de movimentos do circuito é A + B + B – A –
1º Etapa
Identificar se a seqüência é direta ou indireta.
A + B +| B – A –
Seqüência indireta
2º Etapa
Como a seqüência é indireta, dividi-la em setores ou passos.
A+ | B+ | B– | A– |
I | II | III | IV |
4 passos
Observe que na divisão da seqüência em setores, o cilindro A deverá avançar no passo I e retornar no
passo IV. O cilindro B, por sua vez, deverá avançar no passo II e retornar no passo III. Construindo
um quadro com a seqüência dos acionamentos para comando dos movimentos e mudança da
alimentação elétrica entre os setores, teremos:
Passo Comando Acionamento Setor
1º Botão de partida S1 Avanço do cilindro A K1
2º Chave fim de curso S2 Avanço do cilindro B K2
3º Chave fim de curso S3 Retorno do cilindro B K3
4º Chave fim de curso S4 Retorno do cilindro A K4
5º Chave fim de curso S5 Desliga a cadeia estacionária - Fim do K5
ciclo
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 24
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
Muito embora a divisão da seqüência tenha indicado 4 passos, serão utilizados 5 relés auxiliares, sendo um
para cada passo e um para efetuar o desligamento da cadeia estacionária, no final do ciclo.
No primeiro passo, um botão de partida S1 liga o relé K1 o qual deverá efetuar três funções:
- a auto-retenção do próprio relé K1;
- a habilitação do próximo relé auxiliar, no caso K2;
- e o avanço do cilindro A, prendendo a peça, primeiro movimento da seqüência.
Somente quando a peça estiver presa, no final do curso de avanço do cilindro A, a chave fim de curso S2
confirmará o término do movimento e energizará o relé K2. Assim como ocorreu com K1, K2 também deverá
efetuar três funções:
- a auto-retenção do próprio relé K2;
- a habilitação do próximo relé auxiliar, no caso K3;
- e o avanço do cilindro B, furando a peça, segundo movimento da seqüência.
Quando a broca atravessar a peça, no final do curso de avanço do cilindro B, a chave fim de curso S3
confirmará o término do movimento e energizará o relé K3. Assim como ocorreu com K1 e K2, K3 também
deverá efetuar três funções:
- a auto-retenção do próprio relé K3;
- a habilitação do próximo relé auxiliar, no caso K4;
- e o retorno do cilindro B, extraindo a broca da peça, terceiro movimento da seqüência.
Da mesma forma, depois que a broca sair da peça, no final do curso de retorno do cilindro B, a chave fim de
curso S4 confirmará o término do movimento e energizará o relé K4. Assim como ocorreu com K1, K2 e K3,
K4 também deverá efetuar três funções:
- a auto-retenção do próprio relé K4;
- a habilitação do próximo relé auxiliar, no caso K5;
- e o retorno do cilindro A, soltando a peça, quarto e último movimento da seqüência.
Quando o último passo tiver ocorrido, no final do curso de retorno do cilindro A, a chave fim de curso S5
confirmará o término do movimento e energizará o relé K5. Ao contrário do que ocorreu com os quatro relés
anteriores, K5 deverá efetuar apenas uma função, ou seja, desligar o primeiro relé da cadeia estacionária, no
caso K1. Como K5 depende de K4, K4 depende de K3, K3 depende de K2 e K2 depende de K1, devido às
habilitações sucessivas de um para o outro, assim que K1 é desligado, todos o são e a cadeia estacionária
encontra-se novamente na posição inicial, encerrando o ciclo de movimentos da seqüência.
3º Etapa
Construir o circuito pneumático e o circuito elétrico de comando, aplicando o método passo-a-passo.
Circuito 16 Solução A (Pág. 125) sequencia A + B + B – A –
Utilizando válvulas direcionais de 5/2 vias acionadas por servocomando com reposição por mola.
A S5 S2 B S4 S3
50%
50%
50%
50%
4 2 4 2
Y1 Y2
5 3 5 3
1 1
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 25
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
+24V 1 2 3 4 5 6 7 8 9 10 11
Inicio
S1 K1 S2 K2 S3 K3 S4 K4 S5 K1 K2
K3
K5 K1 K2 K3 K4 K4
K1 K2 K3 K4 K5 Y1 Y2
0V
2 4 11 6 10 8 1
3 5 7 9
10 11
Component Description Designation 0 1 2 3 4 5 6 7 8 9 10
100
Double acting cy linder
A 50
mm
100
Double acting cy linder B 50
mm
Pág 127 Circuito 16 Solução B sequencia A + B + B – A –
Utilizando válvulas direcionais de 5/2 vias com acionamento por duplo servocomando.
A S5 S2 B S4 S3
50%
50%
50%
50%
4 2 4 2
Y1 Y2 Y3 Y4
5 3 5 3
1 1
+24V 1 2 3 4 5 6 7 8 9 10 11 12 13
Inicio
S1 K1 S2 K2 S3 K3 S4 K4 S5 K1 K4 K2 K3
K5 K1 K2 K3 K4 K4 K3
K1 K2 K3 K4 K5 Y1 Y2 Y3 Y4
0V
2 4 12 6 10 8 1
3 5 7 9
10 12 13 11
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 26
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
Circuito 17 (Pág. 130) sequencia A + C + B + ( B – C – ) A –
Quando um botão de partida for acionado, três cilindros pneumáticos de ação dupla deverão avançar e
retornar, respeitando a seguinte seqüência de movimentos: A + C + B + ( B – C – ) A –
A novidade, nessa sequência é o movimento simultâneo de dois cilindros. Os cilindros B e C deverão retornar
ao mesmo tempo, conforme indicado pelos parênteses utilizados na representação abreviada da seqüência
de movimentos. Sendo assim, os retornos de B e C serão considerados num único passo.
1º Etapa
Identificar se a seqüência é direta ou indireta.
A+C+B+ | (B–C–)A–
Seqüência indireta
2º Etapa
Como a seqüência é indireta, dividi-la em setores ou passos.
A+ | C+ | B+ | (B–C–) | A– |
I | II | III | IV | V |
5 passos
Observe que na divisão da seqüência em setores, o cilindro A deverá avançar no passo I e retornar no passo
V. O cilindro B, por sua vez, deverá avançar no passo III e retornar no passo IV, junto com o cilindro C. Por
fim, o cilindro C deverá avançar no passo II e retornar no passo IV, juntamente com o cilindro B.
Construindo um quadro com a seqüência dos acionamentos para comando dos movimentos e
mudança da alimentação elétrica entre os setores, teremos:
Passo Comando Acionamento Setor
1º Botão de partida S1 Avanço do cilindro A K1
2º Chave fim de curso S2 Avanço do cilindro C K2
3º Chave fim de curso S3 Avanço do cilindro B K3
4º Chave fim de curso S4 e S5 Retorno dos cilindros B e C K4
5º Chave fim de curso S6 Retorno do cilindro A K5
6º Chave fim de curso S7 Desliga a cadeia estacionária - Fim do K6
ciclo
Quando o segundo passo tiver ocorrido, no final do curso de avanço do cilindro C, a chave fim de curso S3
confirmará o término do movimento e energizará o relé K3. Assim como ocorreu com K1 e K2, K3 também
deverá efetuar três funções:
- a auto-retenção do próprio relé K3;
- a habilitação do próximo relé auxiliar, no caso K4;
- e o avanço do cilindro B, terceiro movimento da seqüência.
Da mesma forma, quando o terceiro passo tiver ocorrido, no final do curso de avanço do cilindro B, a chave
fim de curso S4 confirmará o término do movimento e energizará o relé K4. Assim como ocorreu com K1, K2
e K3, K4 também deverá efetuar três funções:
- a auto-retenção do próprio relé K4;
- a habilitação do próximo relé auxiliar, no caso K5;
- e o retorno simultâneo dos cilindros B e C, quarto e quinto movimentos da seqüência.
Observe que, embora a divisão da seqüência tenha indicado 5 passos, serão utilizados 6 relés auxiliares: um
para cada passo e um para efetuar o desligamento da cadeia estacionária, no final do ciclo. No primeiro
passo, um botão de partida S1 liga o relé K1 o qual deverá efetuar três funções:
- a auto-retenção do próprio relé K1;
- a habilitação do próximo relé auxiliar, no caso K2;
- e o avanço do cilindro A, primeiro movimento da seqüência.
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 27
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
Somente quando o primeiro passo tiver ocorrido, no final do curso de avanço do cilindro A, a chave fim de
curso S2 confirmará o término do movimento e energizará o relé K2. Assim como ocorreu com K1, K2
também deverá efetuar três funções:
- a auto-retenção do próprio relé K2;
- a habilitação do próximo relé auxiliar, no caso K3;
- e o avanço do cilindro C, segundo movimento da seqüência.
Quando o quarto passo tiver ocorrido, no final do curso de retorno dos cilindros B e C, as chaves fim de curso
S5 e S6 confirmarão o término dos movimentos dos dois cilindros e energizará o relé K5. Assim como
ocorreu com K1, K2, K3 e K4, K5 também deverá efetuar três funções:
- a auto-retenção do próprio relé K5;
- a habilitação do próximo relé auxiliar, no caso K6;
- e o retorno do cilindro A, sexto e último movimento da seqüência.
Quando o último passo tiver ocorrido, no final do curso de retorno do cilindro A, a chave fim de curso S7
confirmará o término do movimento e energizará o relé K6. Ao contrário do que ocorreu com os quatro relés
anteriores, K6 deverá efetuar apenas uma função, ou seja, desligar o primeiro relé da cadeia estacionária, no
caso K1.
Como K6 depende de K5, K5 depende de K4, K4 depende de K3, K3 depende de K2 e K2 depende de K1,
devido às habilitações sucessivas de um para o outro, assim que K1 é desligado, todos o são e a cadeia
estacionária encontra-se novamente na posição inicial, encerrando o ciclo de movimentos da seqüência.
3º Etapa
Construir o circuito pneumático e o circuito elétrico de comando, aplicando o método passo a passo.
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 28
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
Circuito 17 Solução A (Pág. 132) sequencia A+C+B+(B-C-)A-
Utilizando válvulas direcionais de 5/2 vias acionadas por servocomando com reposição por mola.
A S7 S2 B S5 S4 C S6 S3
50%
50%
50%
50%
50%
50%
4 2 4 2 4 2
Y1 Y2 Y3
5 3 5 3 5 3
1 1 1
Component Description Designation 0 1 2 3 4 5 6 7 8 9 10
Double acting cy linder 100
A 50
mm
Double acting cy linder 100
B 50
mm
Double acting cy linder 100
C 50
mm
Pushbutton (make) 1
S1
1
Make switch K1
1
Make switch K2
1
Make switch K3
1
Make switch K4
1
Make switch K5
1
Break switch K6
+24V 1 2 3 4 5 6 7 8 9 10 11 12 13 14
Inicio
S1 K1 S2 K2 S3 K3 S4 K4 S5 K5 S7 K1 K3 K2
S6
K4 K4
K6 K1 K2 K3 K4 K5 K5
K1 K2 K3 K4 K5 K6 Y1 Y2 Y3
0V
2 4 6 13 8 12 10 1
3 5 7 14 9 11
12 14 13
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 29
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
Circuito 17 Solução B (Pag. 135) sequencia A+C+B+(B-C-)A-
Utilizando válvulas direcionais de 5/2 vias com acionamento por duplo servocomando.
A B C
S7 S2 S5 S4 S6 S3
50%
50%
50%
50%
50%
50%
4 2 4 2 4 2
Y1 Y2 Y3 Y4 Y5 Y6
5 3 5 3 5 3
1 1 1
+24V 1 2 3 4 5 6 7 8 9 10 11 12 13 14 16
Inicio
S1 K1 S2 K2 S3 K3 S4 K4 S5 K5 S7 K1 K5 K4 K4
S6
K6 K1 K2 K3 K4 K5 K5 K3 K2
K1 K2 K3 K4 K5 K6 Y1 Y2 Y3 Y5 Y4 Y6
0V
2 4 6 14 8 12 10 1
3 5 7 9 11
12 15 14 16 13
Component Description Designation 0 1 2 3 4 5 6 7 8 9 10
1
Make switch K1
1
Make switch K2
1
Make switch K3
1
Make switch K4
1
Make switch K5
Double acting cy linder 100
A 50
mm
Double acting cy linder 100
B 50
mm
Double acting cy linder C 100
50
mm
Circuito 18 (pág 138)
Quando um botão de partida for acionado, dois cilindros pneumáticos de ação dupla deverão avançar e
retornar, respeitando a seguinte seqüência de movimentos: A + B + A - A + B - A -
A novidade, nessa seqüência, é que um dos cilindros, no caso o A, realiza dois movimentos de avanço e dois
de retorno dentro do mesmo ciclo. É importante lembrar que, quando um cilindro realiza mais do que dois
movimentos dentro de um mesmo ciclo, as chaves fim de curso ou sensores por ele acionados estarão fora
da cadeia estacionária, acionando relés auxiliares avulsos cujos contatos serão aproveitados na cadeia, no
local onde seriam colocados os elementos emissores de sinais.
1º Etapa
Identificar se a seqüência é direta ou indireta.
A+B+A– |A+B–A–
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 30
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
AA | AA
Seqüência indireta
2º Etapa
Como a seqüência é indireta, dividi-la em setores ou passos.
A+ |B+ |A– |A+ |B– |A–|
I | II | III | IV |V | VI |
6 passos
Observe que na divisão da seqüência em setores, o cilindro A avança duas vezes: uma no passo I e outra no
passo IV; e retorna duas vezes: uma no passo III e outra no passo VI. O cilindro B, por sua vez, avança no
passo II e retorna no V.
Construindo um quadro com a seqüência dos acionamentos para comando dos movimentos e mudança da
alimentação elétrica entre os setores, teremos:
Passo Comando Acionamento Setor
1º Botão de partida S1 1o. avanço do cilindro A K1
2º Chave fim de curso S2 - 1ª vez Avanço do cilindro B K2
3º Chave fim de curso S3 1o. retorno do cilindro A K3
4º Chave fim de curso S4 - 1ª vez 2o. avanço do cilindro A K4
5º Chave fim de curso S2 - 2ª vez Retorno do cilindro B K5
6º Chave fim de curso S5 2o. retorno do cilindro A K6
7º Chave fim de curso S4 - 2ª vez Desliga a cadeia estacionária - Fim do ciclo K7
Observe que, embora a divisão da seqüência tenha indicado 6 passos, serão utilizados 7 relés auxiliares: um
para cada passo e um para efetuar o desligamento da cadeia estacionária, no final do ciclo. No primeiro
passo, um botão de partida S1 liga o relé K1 o qual deverá efetuar três funções:
a auto-retenção do próprio relé K1;
a habilitação do próximo relé auxiliar, no caso K2;
e o 1o. avanço do cilindro A, primeiro movimento da seqüência.
Somente quando o primeiro passo tiver ocorrido, no final do curso de avanço do cilindro A, a chave fim de
curso S2, em série com um contato aberto de K1, confirmará o término do movimento e energizará o relé K2.
Assim como ocorreu com K1, K2 também deverá efetuar três funções:
a auto-retenção do próprio relé K2;
a habilitação do próximo relé auxiliar, no caso K3;
e o avanço do cilindro B, segundo movimento da seqüência.
Quando o segundo passo tiver ocorrido, no final do curso de avanço do cilindro B, a chave fim de curso S3
confirmará o término do movimento e energizará o relé K3. Assim como ocorreu com K1 e K2, K3 também
deverá efetuar três funções:
a auto-retenção do próprio relé K3;
a habilitação do próximo relé auxiliar, no caso K4;
e o 1retorno do cilindro A, terceiro movimento da seqüência.
Da mesma forma, quando o terceiro passo tiver ocorrido, no final do curso de retorno do cilindro A, a chave
fim de curso S4, em série com um contato aberto de K3, confirmará o término do movimento e energizará o
relé K4. Assim como ocorreu com K1, K2 e K3, K4 também deverá efetuar três funções:
a auto-retenção do próprio relé K4;
a habilitação do próximo relé auxiliar, no caso K5;
e o 2o. avanço do cilindro A, quarto movimento da seqüência.
Quando o quarto passo tiver ocorrido, no final do curso de avanço do cilindro A, a chave fim de curso S2, em
série com um contato aberto de K4, confirmará o término do movimento e energizará o relé K5. Assim como
ocorreu com K1, K2, K3 e K4, K5 também deverá efetuar três funções:
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 31
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
a auto-retenção do próprio relé K5;
a habilitação do próximo relé auxiliar, no caso K6;
e o retorno do cilindro B, quinto movimento da seqüência.
Quando o quinto passo tiver ocorrido, no final do curso de retorno do cilindro B, a chave fim de curso S5
confirmará o término do movimento e energizará o relé K6. Assim como ocorreu com K1, K2, K3, K4 e K5, K6
também deverá efetuar três funções:
a auto-retenção do próprio relé K6;
a habilitação do próximo relé auxiliar, no caso K7;
e o 2o. retorno do cilindro A, sexto e último movimento da seqüência.
Quando o sexto passo tiver ocorrido, no final do curso de retorno do cilindro A, a chave fim de curso S4, em
série com um contato aberto de K6, confirmará o término do movimento e energizará o relé K7. Ao contrário
do que ocorreu com os seis relés anteriores, K7 deverá efetuar apenas uma função, ou seja, desligar o
primeiro relé da cadeia estacionária, no caso K1.
Como K7 depende de K6, K6 depende de K5, K5 depende de K4, K4 depende de K3, K3 depende de K2 e
K2 depende de K1, devido às habilitações sucessivas de um para o outro, assim que K1 é desligado, todos o
são e a cadeia estacionária encontra-se novamente na posição inicial, encerrando o ciclo de movimentos da
seqüência.
3º Etapa
Construir o circuito pneumático e o circuito elétrico de comando, aplicando o método passo a passo.
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 32
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
Circuito 18 Solução A sequencia A + B + A - A + B - A -
Utilizando válvulas direcionais de 5/2 vias acionadas por servocomando com reposição por mola.
A S4 S2
B S5 S3
50%
50%
50%
50%
Component Description Designation 0 2 4 6 8 10
4 2 4 2 100
Double acting cy linder
A 50
Y1 Y2
mm
5 3 5 3 100
Double acting cy linder
1 1 B 50
mm
+24V 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
Inicio
S1 K1 S2 K8 K2 S3 K3 S4 K9 K4 K8 K5 S5 K6 K9 K1 K4 K2
K3 K6
K5
K7 K1 K2 K3 K4 K5 K6
K1 K8 K2 K3 K9 K4 K5 K6 K7 Y1 Y2
0V
2 4 5 16 7 9 10 18 12 17 14 1
4 11 6 9 15 11 13 15
16 18 17
Component Description Designation 0 2 4 6 8 10 12
Make switch K1 1
Make switch K2 1
Make switch K3 1
Make switch K4 1
K5 1
Make switch
Make switch K6 1
Make switch K8 1
Make switch K9 1
Double acting cylinder A mm
Double acting cylinder B mm
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 33
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
Circuito 18 Solução B sequencia A + B + A - A + B - A -
Utilizando válvulas direcionais de 5/2 vias com acionamento por duplo servocomando.
+24V 1 2 3 4 5 6 7 8 9 10
Inicio
S1 K1 S2 K8 K2 S3 K3 S4 K9 K4
A S4 S2
B S5 S3
K7 K1 K2 K3
50%
50%
50%
50%
K1 K8 K2 K3 K9 K4
0V
4 2 4 2
Y1 Y2 Y3 Y4
5 3 5 3 2 4 5 16 7 9 19 10
4 11 6 9 15 11
1 1
16 18 20 19 17
+24V 11 12 13 14 15 16 17 18 19 20 21
K8 K5 S5 K6 K9 K1 K4 K8 K3 K2 K5
K3 K6 K4 K5
K4 K5 K6
K5 K6 K7 Y1 Y2 Y3 Y4
0V
20 12 17 14 1
13 15
21
Component Description Designation 0 10 20 30 40 50 60 70 80
1
Make switch K1
1
Make switch K2
1
Make switch K3
1
Make switch K4
1
Make switch K5
1
Break switch K6
Double acting cy linder 100
A 50
mm
Double acting cy linder 100
B 50
mm
Circuito 19
Uma linha de produção, por exemplo, de componentes de móveis, é necessário erguer painéis (de papelão, compensado ou fibra) de
pilhas e colocar em uma correia transportadora. Isto pode ser conseguido facilmente usando-se ventosas de sucção a vácuo, supondo
que o material em questão não é excessivamente poroso. Neste exemplo, um transportador contínuo é usado para trazer a pilha para o
ponto de transferência, no qual é posicionado por um sensor ótico. O numero e o tamanho das ventosas de sucção será determinado
pelo peso das chapas. As ventosas são montadas em molas para compensar as pequenas diferenças de altura da chapa (até 5 mm).
Traçar o diagrama trajeto passo dos cilindros 7 e 8, para fazer a transferência descrita, supondo ambos inicialmente recuados (no
desenho ambos estão avançados) e o respectivo sinal para acionar as ventosas.
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 34
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
Dispositivo separador de chapas
1 Pilha de chapas
2 Correia transportadora
3 Roletes de suporte
4 Braço extrator por sucção
5 Sensor
6 Correia transportadora discreta
7 Cilindro pneumático
8 Acionador linear sem haste
9 Guia
10 Gerador de vácuo
11 Distribuidor
12 Válvula de eficiência de vácuo
13 Compensador de diferença de altura
14 Ventosa de sucção
A S1 S2
B S3 S4
50%
50%
50%
50%
2
4 2 4 2
Y3
Y1 Y2 1
5 3 5 3
1 1
+24V 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
Inicio
B1 K1 S2 K2 S4 K3 S3 K4 S1 K5 S4 K6 S3 K1 K2 K5
K3
K4
K3 K6 K6
K7 K1 K2 K3 K4 K5 K6
K1 K2 K3 K4 K5 K6 K7 Y1 Y2 Y3
0V
2 4 15 6 14 8 10 16 12 1
3 5 7 9 11 17 13
14 15 17 16
Component Description Designation 0 2 4 6 8 10 12
Make switch K1
Make switch K2
Make switch K3
Make switch K4
Make switch K5
Make switch K6
Double acting cy linder A
Double acting cy linder mm
B mm
Manometer bar
Obs: S3 e S4 possuem 2 contatos no circuito, caso seja necessário pode-se usar um relé auxiliar para os
sensores.
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 35
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
Circuito 20 A+B+C+A-B-C-
Component Description Designation 0 2 4 6 8 10 12
100
80
Double acting cylinder A 60
40
20
mm
100
80
Double acting cylinder B 60
40
20
mm
100
80
Double acting cylinder 60
C
40
20
mm
A B C
A0R A1R B0R B1R C0RC0G C1R
50%
50%
50%
50%
50%
50%
4 2 4 2 4 2
S1 S2 S3 S4 S5 S6
5 3 5 3 5 3
1 1 1
+24V 1 2 3 4 5 7
Inicio
B1 D1 D1 A1R B1R C1R
B2
C0G C0R A0R B0R
D1 S1 S3 S5 S4 S2 S6
0V
2
3
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 36
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
A B C
50% A0R A1R B0R B1R C0R C1R
50%
50%
50%
50%
50%
4 2 4 2 4 2
S1 S2 S3 S4 S5 S6
5 3 5 3 5 3
1 1 1
+24V 1 2 3 5
Inicio
B1 A1R B1R C1R
C0R A0R B0R
S1 S3 S5 S4 S2 S6
0V
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 37
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
Circuito 21 A+(A-B-)A+(A-B+)
Obs. B está inicialmente avançado ao ligar o ar comprimido
Neste caso se utilizou K6 como um inversor para acionar Y2.
Component Description Designation 0 2 4 6 8 10 12
100
Double acting cy linder A 50
mm
100
Double acting cy linder B 50
mm
1
Pushbutton (make)
Inicio
S2 S3 S4 S5
50%
51%
48%
50%
4 2 4 2
Y1 Y2
5 3 5 3
1 1
1 5
+24V 1 2 3 4 5 6 7 8 9 10 11 12 13
K1 S3 S2 S3 S2 K1 K3 K2 K6
K2 K3 K4
S4 K4
S5 K2 K4
K5
K1 K2 K3 K4
K1 K2 K3 K4 K5 Y1 K6
Y2
0V
2 10 4 6 11 8 1 13
3 5 7 12 9
10 12 11
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 38
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
22 Sequencia A+C+(B+A-)(C-A+)(A-B-)
Válvulas sem memória (solenoide simples)
A S7 S2
B S5 S4
C S6 S3
50%
50%
50%
50%
50%
61%
4 2 4 2 4 2
Y1 Y2 Y3
5 3 5 3 5 3
1 1 1
+24V 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Inicio
S1 K1 S2 K2 S3 K3 S7 K4 S2 K5 S7 K1 K4 K3 K2
S4 S6 S5 K3 K5
K5 K4
K6 K1 K2 K3 K4 K5
K1 K2 K3 K4 K5 K6 Y1 Y2 Y3
0V
2 4 12 6 15 8 13 10 1
3 5 7 9 14 11
12 15 14 13
Component Description Designation 0 5 10 15 20
Double acting cy linder A 100
50
mm
Double acting cy linder 100
B 50
mm
Double acting cy linder 100
C 50
mm
Pushbutton (make) 1
S1
1
Make switch K1
1
Make switch K2
1
Make switch K3
1
Make switch K4
1
Make switch K5
1
Break switch K6
Note, neste caso, que o cilindro C retornou bem antes que o cilindro A avançou pela segunda vez na etapa 4
da sequencia, assim a etapa 5 só começa quando o cilindro A termina de avançar. Isto é conseguido com a
lógica E entre S2 e S6 na linha 9 do circuito.
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 39
IFPA – Eletrônica
Referência: Parker Training - Tecnologia Eletropneumática Industrial - Apostila M1002-2 BR Agosto 2001______
23 Sequencia (A+B+)A-B-A+B+(A-B-)
Válvulas sem memória (solenoide simples)
Component Description Designation 0 2 4 6 8 10
100
Double acting cy linder
A 50
mm
100
Double acting cy linder
B 50
mm
S2 S3 S4 S5
50%
51%
48%
50%
4 2 4 2
Y1 Y2
5 3 5 3
1 1
1 2 6
+24V 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
K1 S3 S2 S4 S3 S5 S2 K1 K4 K1 K5
K2 K3 K4 K5 K6
S5
S4 K2 K6 K3 K6
K7
K1 K2 K3 K4 K5 K6
K1 K2 K3 K4 K5 K6 K7 Y1
Y2
0V
2 14 4 16 6 8 10 15 12 1
3 5 7 9 11 17 13
14 15 17
16
arquivo: Parker m1002-2 01-18.doc impresso em Corrêa A. C. 40
S-ar putea să vă placă și
- Roteiro de Prática 4 EletropneumáticaDocument9 paginiRoteiro de Prática 4 EletropneumáticaHulisses Boneti MarconÎncă nu există evaluări
- Exercício Eletropneumatica Gabriel - Andrello 25 - 09Document2 paginiExercício Eletropneumatica Gabriel - Andrello 25 - 09Gabriel AndrelloÎncă nu există evaluări
- Lista de Exercícios 1 - SHPII - Rev00Document18 paginiLista de Exercícios 1 - SHPII - Rev00jrandrade_engenharia50% (2)
- Apostila EletroPneumaticaDocument38 paginiApostila EletroPneumaticaElenildo Bastos50% (2)
- 27 Exercicios Eletropneumatica Resolvido PDFDocument12 pagini27 Exercicios Eletropneumatica Resolvido PDFomatiaspe23280% (3)
- L#1 Lista Exercicios Automação EPDocument7 paginiL#1 Lista Exercicios Automação EPPedro Henrique FerreiraÎncă nu există evaluări
- Aula 2 Pneumática Circuitos BásicosDocument66 paginiAula 2 Pneumática Circuitos BásicosAntonio R S CruzÎncă nu există evaluări
- Circuitos Eletropneumáticos - Metodologia - Ivo-GrátisDocument17 paginiCircuitos Eletropneumáticos - Metodologia - Ivo-GrátisDaicson FélixÎncă nu există evaluări
- Circuitos PneumaticosDocument25 paginiCircuitos PneumaticosKelvin MuzilkÎncă nu există evaluări
- Aulas Práticas de EletroPneumática REVDocument9 paginiAulas Práticas de EletroPneumática REVdanielfortalÎncă nu există evaluări
- 10 Método Passo A PassoDocument62 pagini10 Método Passo A PassoedenireliasÎncă nu există evaluări
- Primeira Lista de Exercícios de PneumáticaDocument7 paginiPrimeira Lista de Exercícios de PneumáticaFernando CamposÎncă nu există evaluări
- Aula 3 - Introdução A Circuitos Pneumáticos e Hidráulicos - Lista de ExercíciosDocument4 paginiAula 3 - Introdução A Circuitos Pneumáticos e Hidráulicos - Lista de ExercíciosFelipe SuzartÎncă nu există evaluări
- Exercicios EletroPneumática GrafcetDocument12 paginiExercicios EletroPneumática Grafcetfrancisco1fernand-11Încă nu există evaluări
- Método Da Cadeia Estacionária - Aplicação para Controladores Lógicos e FluidSimDocument32 paginiMétodo Da Cadeia Estacionária - Aplicação para Controladores Lógicos e FluidSimEder Fernandes Vieira67% (3)
- Exemplos AutomaçãoDocument55 paginiExemplos AutomaçãoTiago FariaÎncă nu există evaluări
- Automação de Sistemas Hidráulicos e PneumáticosDocument67 paginiAutomação de Sistemas Hidráulicos e PneumáticosGilmar TenórioÎncă nu există evaluări
- Aula#3 - Principio Da Corrente AlternadaDocument77 paginiAula#3 - Principio Da Corrente AlternadaAbreuLilianoÎncă nu există evaluări
- Circuitos PneumáticosDocument8 paginiCircuitos PneumáticosAlexandre FoglieniÎncă nu există evaluări
- FestoDocument15 paginiFestoMarcel Ramos100% (1)
- TAREFA 6 AULA 8 - Circuitos Eletrohidráulicos - BRENO TOMAZDocument5 paginiTAREFA 6 AULA 8 - Circuitos Eletrohidráulicos - BRENO TOMAZBreno ThomazÎncă nu există evaluări
- Cap Liv 3Document11 paginiCap Liv 3João Pedro Lira50% (4)
- AULA 06 - CIRCUITOS PNEUMÁTICOS - Metodo CascataDocument8 paginiAULA 06 - CIRCUITOS PNEUMÁTICOS - Metodo CascataWAGNER RODRIGUES DE ABREUÎncă nu există evaluări
- Introdução À EletropneumaticaDocument16 paginiIntrodução À Eletropneumaticaalexlira29100% (4)
- Hidráulica e Pneumática (Apresentação Padrão)Document241 paginiHidráulica e Pneumática (Apresentação Padrão)Adilson Pedro PedroÎncă nu există evaluări
- Exercícios - Automação EletroPneumática IndustrialDocument9 paginiExercícios - Automação EletroPneumática IndustrialRael GdionÎncă nu există evaluări
- Aula 09 PneumaticaDocument115 paginiAula 09 PneumaticaEric Rico100% (1)
- Lista 4 - PneumaticaDocument1 paginăLista 4 - PneumaticaBruno Chagas0% (2)
- Aula 10 PneumaticaDocument65 paginiAula 10 PneumaticaEric Rico100% (8)
- 1 Avaliação de Eletrohidropneumática (Recuperação Paralela)Document8 pagini1 Avaliação de Eletrohidropneumática (Recuperação Paralela)84152601Încă nu există evaluări
- Exercícios de PneumáticaDocument9 paginiExercícios de PneumáticaSilas SouzaÎncă nu există evaluări
- Simbologia PneumáticaDocument14 paginiSimbologia PneumáticaJoão Baptista100% (2)
- ELT2 SAI471 Lista Exercícios 01 2008 Rev3Document5 paginiELT2 SAI471 Lista Exercícios 01 2008 Rev3Daniel Fec Flu0% (1)
- Aula 2 Máquinas Elétricas - Campos Mágneticos em Máquinas RotativasDocument23 paginiAula 2 Máquinas Elétricas - Campos Mágneticos em Máquinas RotativasfelipebozoÎncă nu există evaluări
- Trabalho Mecanico 1Document16 paginiTrabalho Mecanico 1Governo Amede100% (1)
- Ep210 PDFDocument16 paginiEp210 PDFdssscarfaceÎncă nu există evaluări
- Joao Vitor Lima Silva Tarefa 4Document5 paginiJoao Vitor Lima Silva Tarefa 4João VitorÎncă nu există evaluări
- Máquinas Eléctricas (Transformadores)Document30 paginiMáquinas Eléctricas (Transformadores)Sérgio Gelehrter Ricca GonçalvesÎncă nu există evaluări
- Aula 1 Circuitos Elétricos II - Tensão e Corrente AlternadasDocument27 paginiAula 1 Circuitos Elétricos II - Tensão e Corrente AlternadasfelipebozoÎncă nu există evaluări
- Aula 1 - Conceitos de Tensao Normal Tração e Compressao EGMDocument23 paginiAula 1 - Conceitos de Tensao Normal Tração e Compressao EGMRodrigoAndrezaSoares0% (1)
- Mec (01-10) Tração, Torção e FlexãoDocument63 paginiMec (01-10) Tração, Torção e FlexãoEduardoPedrosaÎncă nu există evaluări
- Resolução de Lista de Exercicios 1 - PneumáticaDocument11 paginiResolução de Lista de Exercicios 1 - Pneumáticamaniezo66Încă nu există evaluări
- AutomatismosDocument34 paginiAutomatismosAntónio LopesÎncă nu există evaluări
- Esquemas Pneum - TicosDocument38 paginiEsquemas Pneum - Ticosrfelippe8733100% (1)
- Exercicios PneumáticaDocument21 paginiExercicios Pneumáticafrancisco1fernand-11100% (1)
- Avaliação Acionamento de Dispositivos e Atuadores Pneumática e EletropneumáticaDocument3 paginiAvaliação Acionamento de Dispositivos e Atuadores Pneumática e EletropneumáticaDaniel Fec FluÎncă nu există evaluări
- Desenho EletroeletrônicoDocument44 paginiDesenho EletroeletrônicoRomeu Corradi JúniorÎncă nu există evaluări
- Exercício 3 - Transmissão de Pressão - CORREÇÃODocument1 paginăExercício 3 - Transmissão de Pressão - CORREÇÃOVinye flÎncă nu există evaluări
- Fluidsim-Manual de Exercicios PDFDocument19 paginiFluidsim-Manual de Exercicios PDFdario_baptista4237Încă nu există evaluări
- Dimensionamento de Partida Direta de Motor TrifasicoDocument20 paginiDimensionamento de Partida Direta de Motor TrifasicoJosinaldo Justino100% (1)
- Geradores de C.ADocument17 paginiGeradores de C.AFrancisco JosevaldoÎncă nu există evaluări
- Teste EsquemasDocument4 paginiTeste Esquemasmarioalves1977Încă nu există evaluări
- Exercícios de Eletro HidráulicaDocument2 paginiExercícios de Eletro HidráulicaJéssica Papi Carvalho100% (1)
- Sist.s Hidraúlicos e PneumáticosDocument45 paginiSist.s Hidraúlicos e PneumáticosLucas SantosÎncă nu există evaluări
- T3 Arranque Direto Com InversaoDocument3 paginiT3 Arranque Direto Com InversaoFrancisco DeusÎncă nu există evaluări
- Arranque Direto Com Inversao t3Document3 paginiArranque Direto Com Inversao t3Francisco DeusÎncă nu există evaluări
- Atividade 02 10 ISELIDocument2 paginiAtividade 02 10 ISELIGabriel AndrelloÎncă nu există evaluări
- Chave Partida ReversoraDocument7 paginiChave Partida Reversoralarissa ronchiÎncă nu există evaluări
- TrabalhoDocument41 paginiTrabalhoHMN PlayÎncă nu există evaluări
- Eh 1Document25 paginiEh 1api-3704409100% (1)
- Rer ResolvidoDocument2 paginiRer Resolvidohecirlene vieiraÎncă nu există evaluări
- WOCA - Instalação Elétrica Online - Edição de ProjetoDocument1 paginăWOCA - Instalação Elétrica Online - Edição de Projetohecirlene vieiraÎncă nu există evaluări
- Calculo Numerico Nova Abortagem IfpaDocument166 paginiCalculo Numerico Nova Abortagem Ifpahecirlene vieiraÎncă nu există evaluări
- Prova 7 Engenheiro A Junior Area AutomacaoDocument19 paginiProva 7 Engenheiro A Junior Area Automacaohecirlene vieiraÎncă nu există evaluări
- Transistor TIPDocument4 paginiTransistor TIPhecirlene vieiraÎncă nu există evaluări
- 3 Encontros Com o Diabo Uma Análise Dos Contos o Sapateiro e A Força Maligna e Conversa de Um Bêbado Com Um Diabo Sóbrio de Anton TchékhovDocument19 pagini3 Encontros Com o Diabo Uma Análise Dos Contos o Sapateiro e A Força Maligna e Conversa de Um Bêbado Com Um Diabo Sóbrio de Anton TchékhovDenise OliveiraÎncă nu există evaluări
- Geografia 7º AnoDocument6 paginiGeografia 7º AnoGilvan Ramada SantiagoÎncă nu există evaluări
- Programa COGEAE 2015-2Document75 paginiPrograma COGEAE 2015-2Coxa 1990Încă nu există evaluări
- O Método Clínico Centrado Na Pessoa: Um ResumoDocument14 paginiO Método Clínico Centrado Na Pessoa: Um Resumojuniorblack_7Încă nu există evaluări
- Aula PilaresDocument21 paginiAula PilaresAlessandro BastosÎncă nu există evaluări
- Teste de Comparação Entre MediasDocument44 paginiTeste de Comparação Entre MediasHelio Duval de OliveiraÎncă nu există evaluări
- ATLANTIS Traduzida-1 PDFDocument450 paginiATLANTIS Traduzida-1 PDFDEL POL ESTIVA GERBIÎncă nu există evaluări
- Hidrossanitário 02Document1 paginăHidrossanitário 02Luiz EmilioÎncă nu există evaluări
- Fundamentos 8Document10 paginiFundamentos 8Paula Costa DuarteÎncă nu există evaluări
- Lei #17896 DE 11 01 2022 - Estadual - Ceará - LeDocument2 paginiLei #17896 DE 11 01 2022 - Estadual - Ceará - LeJose Ilton Cruz FilhoÎncă nu există evaluări
- Apendice Justificativo - Consideraçoes de Açoes e Combinatoria - Disciplina MetalicasDocument17 paginiApendice Justificativo - Consideraçoes de Açoes e Combinatoria - Disciplina MetalicasDavid Salomão Pinto Castanho BizarroÎncă nu există evaluări
- BG N 097 - de 21 Maio 2021.PDF CorneteiroDocument64 paginiBG N 097 - de 21 Maio 2021.PDF CorneteiroBlendo CorrêaÎncă nu există evaluări
- Aula 12 Com e ProDocument5 paginiAula 12 Com e ProLeandro CostaÎncă nu există evaluări
- Plano Analítico Educação Visual 8 Classe II Trimestre 2022Document3 paginiPlano Analítico Educação Visual 8 Classe II Trimestre 2022NelsonAngeloZameiaÎncă nu există evaluări
- OSTEOLOGIADocument24 paginiOSTEOLOGIADiêgo Passos100% (1)
- Interface Zero 2.0 - Imperio Do Sol - JAPÃODocument67 paginiInterface Zero 2.0 - Imperio Do Sol - JAPÃOvictor morcourtÎncă nu există evaluări
- Elaboração Do Plano de PormenorDocument30 paginiElaboração Do Plano de PormenorHenry De SanchezÎncă nu există evaluări
- Relatório de Verificação de RiscosDocument4 paginiRelatório de Verificação de RiscosMaria Clara100% (2)
- Topografia 2Document80 paginiTopografia 2Meghan WilsonÎncă nu există evaluări
- Bioética Uma AproximaçãoDocument9 paginiBioética Uma AproximaçãophilipeÎncă nu există evaluări
- Produção Científica em NutriçãoDocument42 paginiProdução Científica em NutriçãoRobertaÎncă nu există evaluări
- Cartilha MT Prev - Regras de Aposentadoria e Pensão Por Morte PDFDocument38 paginiCartilha MT Prev - Regras de Aposentadoria e Pensão Por Morte PDFSandra Rosa Santana SilvaÎncă nu există evaluări
- Odis10 Ficha Ampliacao b7Document2 paginiOdis10 Ficha Ampliacao b7Fernando CarruscaÎncă nu există evaluări
- Nota de Aula 05 - Dimensionamento de Molhes e Quebra-MaresDocument30 paginiNota de Aula 05 - Dimensionamento de Molhes e Quebra-MaresAlex CacauÎncă nu există evaluări
- Universidade Lúrio Faculdade de Ciências de Saúde Licenciatura em Administração e Gestão em SaúdeDocument17 paginiUniversidade Lúrio Faculdade de Ciências de Saúde Licenciatura em Administração e Gestão em SaúdeAlige JoseÎncă nu există evaluări
- Autista e Lingua InglesaDocument10 paginiAutista e Lingua InglesaAline LoboÎncă nu există evaluări
- Vania Araujo,+artigo+01Document22 paginiVania Araujo,+artigo+01Victor OliveiraÎncă nu există evaluări
- 3 Chamada Inspeção de Saúde e Entrevista RH 2022-2023Document4 pagini3 Chamada Inspeção de Saúde e Entrevista RH 2022-2023guilherme silveiraÎncă nu există evaluări
- Lista - 1 - Instalações Prediais (Like) PDFDocument3 paginiLista - 1 - Instalações Prediais (Like) PDFMarques35741Încă nu există evaluări
- Gestão Estratégica de PessoasDocument81 paginiGestão Estratégica de PessoasTati MorenoÎncă nu există evaluări