S-ar putea să vă placă și
- Service Manual BV Family SMCM BV R1.1Document112 paginiService Manual BV Family SMCM BV R1.1Niwrad Montilla100% (8)
- Ch07 AVR Programming in CDocument54 paginiCh07 AVR Programming in Csajid rajaÎncă nu există evaluări
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisDe la EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisEvaluare: 4 din 5 stele4/5 (2)
- Ee8451 Lic NotesDocument224 paginiEe8451 Lic NotesUma100% (1)
- Microcontroller Interview Questions and Answers PDFDocument8 paginiMicrocontroller Interview Questions and Answers PDFbalaji_446913478Încă nu există evaluări
- The 8051 Microcontroler Based Embedded SystemsDocument43 paginiThe 8051 Microcontroler Based Embedded Systemsmanishpatel_790% (1)
- EC8791 Embedded and Real Time SystemsDocument78 paginiEC8791 Embedded and Real Time SystemsSivagami ManiÎncă nu există evaluări
- Ec 2254 Linear Integrated CircuitsDocument376 paginiEc 2254 Linear Integrated CircuitsPavan Kumar100% (1)
- Intel CorporationDocument1 paginăIntel CorporationAliciaJÎncă nu există evaluări
- Iot Based Surveillance Robot IJERTV7IS030061Document5 paginiIot Based Surveillance Robot IJERTV7IS030061rgkusumbaÎncă nu există evaluări
- 355 - EC8451 Electromagnetic Fields - 2 Marks With Answers 1 PDFDocument32 pagini355 - EC8451 Electromagnetic Fields - 2 Marks With Answers 1 PDFBala913100% (1)
- Voice Controlled Car: BS Documentation by Hammad Malik (F16-1244) Arslan Ali (F16-1160) Hassam Akram (F16-1153)Document16 paginiVoice Controlled Car: BS Documentation by Hammad Malik (F16-1244) Arslan Ali (F16-1160) Hassam Akram (F16-1153)Rana Arslan100% (1)
- EC8701 Antennas and Microwave Engineering PDFDocument42 paginiEC8701 Antennas and Microwave Engineering PDFpriya dharshini0% (1)
- V: Building Iot With Arduino &raspberry Pi: VunitDocument41 paginiV: Building Iot With Arduino &raspberry Pi: VunitPonraj ParkÎncă nu există evaluări
- Digital Logic Circuits Objective QuestionsDocument9 paginiDigital Logic Circuits Objective Questionssundar_mohan_2100% (2)
- ADE Lab Viva Question and Answer 2018Document5 paginiADE Lab Viva Question and Answer 2018NITHIN NÎncă nu există evaluări
- Signals and Systems Lab Manual Print PDFDocument27 paginiSignals and Systems Lab Manual Print PDFTejhas Kapoor100% (2)
- DataFlow Modeling in VerilogDocument22 paginiDataFlow Modeling in VerilogWaqas Ahmed0% (1)
- Circuitrix EventDocument6 paginiCircuitrix EventNikhil KumarÎncă nu există evaluări
- MCQ - MPMCDocument9 paginiMCQ - MPMCRanganayaki RamkumarÎncă nu există evaluări
- Project Report DoorDocument48 paginiProject Report Doornehadudeja14100% (3)
- RS232 Communication Bus, RS485, I2C, SPI, CAN, JTAG PDFDocument20 paginiRS232 Communication Bus, RS485, I2C, SPI, CAN, JTAG PDFndcongÎncă nu există evaluări
- MPMC MCQDocument9 paginiMPMC MCQDhivyaManian83% (6)
- DSP MCQDocument2 paginiDSP MCQBala MuruganÎncă nu există evaluări
- Experiment 3 PDFDocument4 paginiExperiment 3 PDFVmosaÎncă nu există evaluări
- Question Paper With Solution - The 8051 Microcontroller Based Embedded SystemsJUNE - JULY 2013 VTUDocument29 paginiQuestion Paper With Solution - The 8051 Microcontroller Based Embedded SystemsJUNE - JULY 2013 VTUmanishpatel_79100% (2)
- Assignment 1 DSDDocument2 paginiAssignment 1 DSDsarala tÎncă nu există evaluări
- DAC ADC Interfacing With 8051Document37 paginiDAC ADC Interfacing With 8051Gowri100% (1)
- Ca Q&aDocument129 paginiCa Q&aRavi TejaÎncă nu există evaluări
- PC To PC Communication Using LaserDocument53 paginiPC To PC Communication Using Lasersandarbh588% (8)
- Microprocessor & Microcontroller Objective Type QuestionsDocument2 paginiMicroprocessor & Microcontroller Objective Type Questionsgokulchandru100% (2)
- Interfacing Servo Motor With Atmega32 Atmel AVR Microcontroller PDFDocument11 paginiInterfacing Servo Motor With Atmega32 Atmel AVR Microcontroller PDFAnil JobyÎncă nu există evaluări
- Complete Vlsi NotesDocument159 paginiComplete Vlsi NotesSUNIL MP75% (4)
- Fuzzy Route Control of Dynamic Model of Four-Wheeled Mobile RobotDocument5 paginiFuzzy Route Control of Dynamic Model of Four-Wheeled Mobile RobotIstván KecskésÎncă nu există evaluări
- Chapter 12 - ADC TestingDocument87 paginiChapter 12 - ADC TestingMonal Bhoyar100% (1)
- Verilog Lecture NotesDocument92 paginiVerilog Lecture NotesRavi KishoreÎncă nu există evaluări
- Multiple Choice MPDocument9 paginiMultiple Choice MPS RAVI50% (2)
- Verilog HDL - 18ec56 AssignmentDocument2 paginiVerilog HDL - 18ec56 Assignmentsureshfm1Încă nu există evaluări
- Memory Address DecodingDocument31 paginiMemory Address DecodingMehulJainÎncă nu există evaluări
- Jain College of Engineering, Belagavi: Signals & Systems (18ec45) Question Bank For Cie - IiiDocument3 paginiJain College of Engineering, Belagavi: Signals & Systems (18ec45) Question Bank For Cie - Iiisystech techniques50% (2)
- EC1401 VLSI - Question Bank (N.shanmuga Sundaram)Document35 paginiEC1401 VLSI - Question Bank (N.shanmuga Sundaram)Dr. N.Shanmugasundaram50% (2)
- Embedded System Design-NPTEL-NOTESDocument38 paginiEmbedded System Design-NPTEL-NOTESGulshan Upreti100% (1)
- Comprehensive Viva QuestionsDocument9 paginiComprehensive Viva Questionsraju83650% (2)
- CS801 Iot Lab ManualDocument90 paginiCS801 Iot Lab ManualShamayra KhanÎncă nu există evaluări
- Arm-Cortex m3Document13 paginiArm-Cortex m3vinjamurisivaÎncă nu există evaluări
- Program Reasoning Lab Manual Part1Document11 paginiProgram Reasoning Lab Manual Part1Shubham GargÎncă nu există evaluări
- Unit IV & V Question BankDocument5 paginiUnit IV & V Question BanknithyasaviÎncă nu există evaluări
- Auto Power Supply Control From 4 Different Sources Solar, Mains, Generator & Inverter To Ensure No Break PowerDocument23 paginiAuto Power Supply Control From 4 Different Sources Solar, Mains, Generator & Inverter To Ensure No Break PowerAnonymous QIuAGIadXm69% (13)
- VHDL Question BankDocument5 paginiVHDL Question BankSugam KatariaÎncă nu există evaluări
- Examination Room Guide Using RFID For The Jumbling System Based EXAMSDocument2 paginiExamination Room Guide Using RFID For The Jumbling System Based EXAMSRambhupalReddyÎncă nu există evaluări
- LIC EEE-Multiple Choice Questions 2017Document11 paginiLIC EEE-Multiple Choice Questions 2017jagan40% (5)
- List of EEE Project Ideas For Final Year Engineering StudentsDocument8 paginiList of EEE Project Ideas For Final Year Engineering StudentsK.RamachandranÎncă nu există evaluări
- MCQ's DSP 201-300Document18 paginiMCQ's DSP 201-300Rohit NegiÎncă nu există evaluări
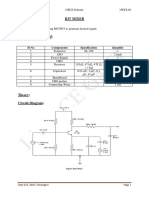
- 15ecl48-VTU-raghudathesh-BJT MIXER PDFDocument2 pagini15ecl48-VTU-raghudathesh-BJT MIXER PDFraghudatheshgp100% (1)
- RAKSA Idet 2015Document29 paginiRAKSA Idet 2015CristianÎncă nu există evaluări
- Voice Guidance System For Blind in Traffic Signal, Bus Monitoring and Obstacle Identification by Using Ultrasonic SensorDocument4 paginiVoice Guidance System For Blind in Traffic Signal, Bus Monitoring and Obstacle Identification by Using Ultrasonic SensorifyÎncă nu există evaluări
- RAKSA Idet Manual ENGDocument28 paginiRAKSA Idet Manual ENGRedditÎncă nu există evaluări
- Sachin TechDocument18 paginiSachin Techsachin HUÎncă nu există evaluări
- A Presentation: Gesture VocalizerDocument18 paginiA Presentation: Gesture VocalizerKammara BharathkumarÎncă nu există evaluări
- Voice Controlled Robotic Vehicle: AbstractDocument11 paginiVoice Controlled Robotic Vehicle: AbstractNikhil GarrepellyÎncă nu există evaluări
- Voice Controlled Robot With Wireless Video TransmissionDocument57 paginiVoice Controlled Robot With Wireless Video TransmissionShreya ShettyÎncă nu există evaluări
- N1 AM E01 20130222 AlarmDocument82 paginiN1 AM E01 20130222 AlarmThanh TranÎncă nu există evaluări
- ARM Processor Study NotesDocument5 paginiARM Processor Study NotesNAVEEN NAVIÎncă nu există evaluări
- Multiple Access Techniques For Wireless Communications: 2005/07/06 Weng Chien-ErhDocument60 paginiMultiple Access Techniques For Wireless Communications: 2005/07/06 Weng Chien-ErhVijay BabuÎncă nu există evaluări
- Multiple Access Techniques For Wireless Communications: 2005/07/06 Weng Chien-ErhDocument60 paginiMultiple Access Techniques For Wireless Communications: 2005/07/06 Weng Chien-ErhVijay BabuÎncă nu există evaluări
- Finalreport PDFDocument21 paginiFinalreport PDFNAVEEN NAVIÎncă nu există evaluări
- LogcatDocument13.951 paginiLogcatalexcoluratvÎncă nu există evaluări
- Powerlogictm P5: User ManualDocument604 paginiPowerlogictm P5: User ManualMohamed TaherÎncă nu există evaluări
- PPS Assignment - 4: Test CaseDocument2 paginiPPS Assignment - 4: Test Casemsugnan9124Încă nu există evaluări
- Code For Socket Program of HTTP Server in JavaDocument3 paginiCode For Socket Program of HTTP Server in JavaNamachivayam DharmalingamÎncă nu există evaluări
- Soft Skill Interview QuestionsDocument7 paginiSoft Skill Interview QuestionsTrần Anh HùngÎncă nu există evaluări
- Cyble Module CM3030 2Document15 paginiCyble Module CM3030 2AKIGORÎncă nu există evaluări
- Plan Dsu (G)Document9 paginiPlan Dsu (G)Dhiraj Chaudhari CO-137Încă nu există evaluări
- It 429 - Week 11Document11 paginiIt 429 - Week 11mjdcan_563730775Încă nu există evaluări
- 7.3.2.10 Lab - Research Laptop DrivesDocument2 pagini7.3.2.10 Lab - Research Laptop Drivesyoudy012Încă nu există evaluări
- Basic Networking 2013 PDFDocument427 paginiBasic Networking 2013 PDFanandaÎncă nu există evaluări
- OutputDocument1 paginăOutputasdfÎncă nu există evaluări
- XR35CX Digital Controller For Medium Temperature Refrigeration Applications Installation and Operation ManualDocument40 paginiXR35CX Digital Controller For Medium Temperature Refrigeration Applications Installation and Operation Manualwolf125Încă nu există evaluări
- SSS 1 3RD Term Lesson NoteDocument29 paginiSSS 1 3RD Term Lesson NoteOyinade AdeoluÎncă nu există evaluări
- Ericsson RBS 2000Document2 paginiEricsson RBS 2000sonchoy170% (1)
- Inno3D Geforce RTX 2080 Super Ichill BlackDocument1 paginăInno3D Geforce RTX 2080 Super Ichill BlackRintu PatarÎncă nu există evaluări
- An Underwater Image Enhancement Benchmark Dataset and BeyondDocument12 paginiAn Underwater Image Enhancement Benchmark Dataset and BeyondM Tarun saiÎncă nu există evaluări
- CertificateDocument2 paginiCertificateAlok Prasad THAKURÎncă nu există evaluări
- Red Hat Directory Server-11-Administration Guide-en-US PDFDocument536 paginiRed Hat Directory Server-11-Administration Guide-en-US PDFEdgar Eduardo Cordoba AcerosÎncă nu există evaluări
- Modbus Easy Master de W462-E1-07+CP1LDocument4 paginiModbus Easy Master de W462-E1-07+CP1LHarol ValenciaÎncă nu există evaluări
- Vimba Quickstart GuideDocument5 paginiVimba Quickstart Guidenewplayer12Încă nu există evaluări
- Main Board Spec PDFDocument21 paginiMain Board Spec PDFALI ALIBELDJILALIÎncă nu există evaluări
- Sanmotion AC Servo PYO Series Instruction ManualDocument370 paginiSanmotion AC Servo PYO Series Instruction ManualsunhuynhÎncă nu există evaluări
- Instruction Manual SPD-M40Document106 paginiInstruction Manual SPD-M40Cuong NguyenÎncă nu există evaluări
- Datasheet IVT-S V1.01Document43 paginiDatasheet IVT-S V1.01Mirna RistovskiÎncă nu există evaluări
- SQADocument22 paginiSQAM. S. ChikkamaniÎncă nu există evaluări
- Schneider Protection RelayDocument8 paginiSchneider Protection Relayeugene oneillÎncă nu există evaluări
- Shalini StrategyDocument3 paginiShalini StrategySaurabh voicecoachÎncă nu există evaluări
- Almond Enterprises: Quotation No.Document2 paginiAlmond Enterprises: Quotation No.sushanta chowdhuryÎncă nu există evaluări