S-ar putea să vă placă și
- Certificado Anual de Retención en La Fuente E Información AdicionalDocument1 paginăCertificado Anual de Retención en La Fuente E Información AdicionalNico MendezÎncă nu există evaluări
- Copia de Practica 1.BPSK Basado en VCODocument12 paginiCopia de Practica 1.BPSK Basado en VCONico MendezÎncă nu există evaluări
- Mendez Nicolas Examen1Document5 paginiMendez Nicolas Examen1Nico MendezÎncă nu există evaluări
- Ejercicios Primer Parcial 1-2018Document3 paginiEjercicios Primer Parcial 1-2018Nico MendezÎncă nu există evaluări
- TallerDocument4 paginiTallerNico MendezÎncă nu există evaluări
- Contador Descendente de 45 A 0Document7 paginiContador Descendente de 45 A 0Nico MendezÎncă nu există evaluări
- DecálogoDocument1 paginăDecálogoLisette Andrade ReyesÎncă nu există evaluări
- Análisis Financiero de Microsoft y AppleDocument10 paginiAnálisis Financiero de Microsoft y AppleCesar Lebeau QuexadaÎncă nu există evaluări
- Politica Convencion de Nombres SQLDocument2 paginiPolitica Convencion de Nombres SQLFernando HernandezÎncă nu există evaluări
- Actividad Evaluativa - Eje 2Document2 paginiActividad Evaluativa - Eje 2Diana Paola ZapataÎncă nu există evaluări
- Taller Fases de La Administracion ControlDocument4 paginiTaller Fases de La Administracion ControlVANESSA DEL CARMENBUENDIA LOPEZ ESTUDIANTEÎncă nu există evaluări
- La Observación IndirectaDocument3 paginiLa Observación IndirectaMartha RaquelÎncă nu există evaluări
- Actividad 3Document4 paginiActividad 3Deysy PalmaÎncă nu există evaluări
- Caso de La Nube Tarea-Trabajo GrupalDocument3 paginiCaso de La Nube Tarea-Trabajo GrupalKarla Machare GonzálesÎncă nu există evaluări
- Sesion 1 - Conceptos IntroductoriosDocument26 paginiSesion 1 - Conceptos IntroductoriosClaudia Patricia Giraldo HenaoÎncă nu există evaluări
- Acta Formato 2019Document2 paginiActa Formato 2019AndyLamadrid100% (1)
- Yguazu Cementos. Cierre MARZODocument11 paginiYguazu Cementos. Cierre MARZOMaria Del Carmen RodriguezÎncă nu există evaluări
- Actividad 1.4Document8 paginiActividad 1.4Mariana InclanÎncă nu există evaluări
- 18 Escotes - PDF Versión 1Document17 pagini18 Escotes - PDF Versión 1Jas VelasÎncă nu există evaluări
- Interface Gráfica de ExcelDocument17 paginiInterface Gráfica de ExcelCielo Guerra100% (1)
- Pr-Gi-18 V1 Procedimiento Seguro Durante Desplazamiento TerrestreDocument6 paginiPr-Gi-18 V1 Procedimiento Seguro Durante Desplazamiento TerrestreJhan Carlos Barbosa Cepeda100% (1)
- FacturaCFDI 3026Document1 paginăFacturaCFDI 3026Francisco OrozcoÎncă nu există evaluări
- Porque Es Importante La Implementación de Un Centro CulturalDocument2 paginiPorque Es Importante La Implementación de Un Centro CulturalLuis Gustavo Cruz CarhuapomaÎncă nu există evaluări
- 1 Manual Fundet - Materiales ElectricosDocument66 pagini1 Manual Fundet - Materiales ElectricosRené MansillaÎncă nu există evaluări
- Instrucciones para Tu Examen de ClasificacionDocument1 paginăInstrucciones para Tu Examen de ClasificacionJesus Antonio Arrieta QuispeÎncă nu există evaluări
- Medición de ElementosDocument8 paginiMedición de ElementosWILMER FABIAN AVILA GOMEZÎncă nu există evaluări
- CRITERIOS DE DISEÑO DEL TANQUE (Autoguardado)Document9 paginiCRITERIOS DE DISEÑO DEL TANQUE (Autoguardado)julio cesar mamani alemanÎncă nu există evaluări
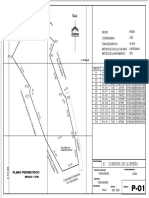
- CHACAPALPA PERIMETRICO - Layout1Document1 paginăCHACAPALPA PERIMETRICO - Layout1Edith Zulema RAMON ORDOÑEZÎncă nu există evaluări
- Ejercicio Modelación y Programación LinealDocument14 paginiEjercicio Modelación y Programación LinealJansel PachonÎncă nu există evaluări
- Módulo 1 - Introducción A La Computación y Gestión de Servicios en La Nube v042022Document22 paginiMódulo 1 - Introducción A La Computación y Gestión de Servicios en La Nube v042022Rey DavidÎncă nu există evaluări
- Adams Equipo Necesario VideoconferenciaDocument13 paginiAdams Equipo Necesario VideoconferenciaTess PorrónÎncă nu există evaluări
- Grupo 5 Exposicion PDHDocument20 paginiGrupo 5 Exposicion PDHLuis Eduardo Gonzales ArceÎncă nu există evaluări
- ENCUESTADocument3 paginiENCUESTADcaj DcajÎncă nu există evaluări
- Documentos - Id 31 140311 46Document4 paginiDocumentos - Id 31 140311 46rolan2010Încă nu există evaluări
- Transformadores y Motores (1) 2IM32Document20 paginiTransformadores y Motores (1) 2IM32Esmeralda Cristal González CarbajalÎncă nu există evaluări
- Encuesta de Adicciones A Las Nuevas TecnologiasDocument6 paginiEncuesta de Adicciones A Las Nuevas Tecnologiasyamile bustosÎncă nu există evaluări