S-ar putea să vă placă și
- Examen de Enlaces QuimicosDocument1 paginăExamen de Enlaces QuimicosAp LpÎncă nu există evaluări
- CCS PICDocument161 paginiCCS PICAdolfo Jum100% (5)
- Monografía - Freno de Aire Comprimido y Freno MotorDocument93 paginiMonografía - Freno de Aire Comprimido y Freno MotorBilly Solano JesusÎncă nu există evaluări
- Libro 8º CienciasDocument226 paginiLibro 8º CienciasAlexis RennerÎncă nu există evaluări
- Mat1 U8 Sesión 08Document8 paginiMat1 U8 Sesión 08Paola Julca ValquiÎncă nu există evaluări
- Capitulo IIIDocument21 paginiCapitulo IIIWalter GomezÎncă nu există evaluări
- Integración Con Ecommerce Bancard Compra Simple - Versión 0.3.4Document21 paginiIntegración Con Ecommerce Bancard Compra Simple - Versión 0.3.4Andre Regis DarugnaÎncă nu există evaluări
- Fórmula de Leibniz PDFDocument9 paginiFórmula de Leibniz PDFDiana PadillaÎncă nu există evaluări
- CLASE10Document24 paginiCLASE10Laime CarrilloÎncă nu există evaluări
- CLASE9Document17 paginiCLASE9Laime CarrilloÎncă nu există evaluări
- Analisis de Señales-2Document11 paginiAnalisis de Señales-2Laime CarrilloÎncă nu există evaluări
- Rau Nunez Cabello - TALLER DE ESTADISTICA Y PROBABILIDADDocument38 paginiRau Nunez Cabello - TALLER DE ESTADISTICA Y PROBABILIDADmimajiÎncă nu există evaluări
- Manual MATLAB PDFDocument33 paginiManual MATLAB PDFFredy Andres Valencia100% (1)
- BIOLOGIADocument5 paginiBIOLOGIALaime CarrilloÎncă nu există evaluări
- Convolucion DiscretaDocument18 paginiConvolucion DiscretaLaime CarrilloÎncă nu există evaluări
- Transformada FourierDocument76 paginiTransformada FourierLaime CarrilloÎncă nu există evaluări
- Análisis de señales continuas y discretasDocument19 paginiAnálisis de señales continuas y discretasLaime CarrilloÎncă nu există evaluări
- Clase1 PDFDocument16 paginiClase1 PDFJanner GamarraÎncă nu există evaluări
- ConvolucioncontinuaDocument12 paginiConvolucioncontinuaLaime CarrilloÎncă nu există evaluări
- Reclamaciones Por Valoración Del VideoDocument7 paginiReclamaciones Por Valoración Del VideoLaime CarrilloÎncă nu există evaluări
- T5 2ESO Sistemas Materiales VToreno 2.0Document10 paginiT5 2ESO Sistemas Materiales VToreno 2.0Josedu MartinezÎncă nu există evaluări
- MatematicaDocument25 paginiMatematicaLaime CarrilloÎncă nu există evaluări
- Clasificacion de Los Seres Vivos - MicrobiologiaDocument10 paginiClasificacion de Los Seres Vivos - MicrobiologiaLaime CarrilloÎncă nu există evaluări
- Terminos y Condiciones Encuentro NAL 2018Document13 paginiTerminos y Condiciones Encuentro NAL 2018Laime CarrilloÎncă nu există evaluări
- Orientaciones y Formatos para Reclamaciones ECDF III - FecodeDocument3 paginiOrientaciones y Formatos para Reclamaciones ECDF III - FecodeLector Estelar ArabeÎncă nu există evaluări
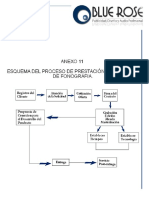
- Anexo 11b Flujograma Del Servicio de FonografiaDocument1 paginăAnexo 11b Flujograma Del Servicio de FonografiaLaime CarrilloÎncă nu există evaluări
- Guia Taller Iniciacion Cast PDFDocument258 paginiGuia Taller Iniciacion Cast PDFJacqueline AvendañoÎncă nu există evaluări
- HONGOSDocument8 paginiHONGOSLaime CarrilloÎncă nu există evaluări
- Resolucion 000764 de 9 de Noviembre de 2017 PDFDocument4 paginiResolucion 000764 de 9 de Noviembre de 2017 PDFLaime CarrilloÎncă nu există evaluări
- Relacion Docentes Convocatoria 2016-2017Document20 paginiRelacion Docentes Convocatoria 2016-2017Laime CarrilloÎncă nu există evaluări
- Anexo 10 Portafolio de ServiciosDocument1 paginăAnexo 10 Portafolio de ServiciosLaime CarrilloÎncă nu există evaluări
- Anexo 17b Mapa de MacrolocalizacionDocument1 paginăAnexo 17b Mapa de MacrolocalizacionLaime CarrilloÎncă nu există evaluări
- Plazas de Primarias Vacantes PDFDocument6 paginiPlazas de Primarias Vacantes PDFLaime CarrilloÎncă nu există evaluări
- ANEXO No. 02 FICHAS RESUMEN ANALTICO EDUCATIVODocument93 paginiANEXO No. 02 FICHAS RESUMEN ANALTICO EDUCATIVOLaime CarrilloÎncă nu există evaluări
- Listado de Admitidos programa Derecho 2018Document2 paginiListado de Admitidos programa Derecho 2018Laime CarrilloÎncă nu există evaluări
- Aprendizaje ColaborativoDocument500 paginiAprendizaje ColaborativoMarus LaraÎncă nu există evaluări
- Color - Stability - and - Flexural - S (1) .En - EsDocument7 paginiColor - Stability - and - Flexural - S (1) .En - EsDANIELA RINCÓN BELLOÎncă nu există evaluări
- Ejercicios VectorialesDocument17 paginiEjercicios VectorialesDomingo Eduardo Tzorín DíazÎncă nu există evaluări
- Proyecto de Tesis - Yeison-CorregidaDocument44 paginiProyecto de Tesis - Yeison-CorregidaJeisson Apaza100% (1)
- G TE Lògica Matemàtica-2s 2018Document9 paginiG TE Lògica Matemàtica-2s 2018Jairo MoralesÎncă nu există evaluări
- Ley de Boyle y cálculos de presión y volumen de gasesDocument4 paginiLey de Boyle y cálculos de presión y volumen de gasesEve TamayoÎncă nu există evaluări
- Matemática Aplicada en Circuitos TrifásicosDocument5 paginiMatemática Aplicada en Circuitos TrifásicosJose Antonio Ormeño VillaÎncă nu există evaluări
- Erosión y socavación de caucesDocument11 paginiErosión y socavación de caucesOscar Jimeno VenegasÎncă nu există evaluări
- INTRODUCCIÓN A La CartografíaDocument41 paginiINTRODUCCIÓN A La CartografíaGustavo ZelayaÎncă nu există evaluări
- SAT POS AIO IX15i3 - EspañolDocument2 paginiSAT POS AIO IX15i3 - Españolrvaca1991Încă nu există evaluări
- Sólidos Totales InformeDocument27 paginiSólidos Totales Informejesi_037100% (1)
- La Teoria Del CaosDocument9 paginiLa Teoria Del CaosChristian Gabriel Stampacchio100% (24)
- Ejercicios VolumetriasDocument1 paginăEjercicios VolumetriasjaimeqornagoÎncă nu există evaluări
- Alfabetización Inicial (Wolman)Document3 paginiAlfabetización Inicial (Wolman)PabloÎncă nu există evaluări
- Cinemática - MRUDocument4 paginiCinemática - MRUPAUL EXON CHIRINOS JURADOÎncă nu există evaluări
- Peri Liwa ManualDocument11 paginiPeri Liwa ManualEdgar Erich Scholz MuñozÎncă nu există evaluări
- Polimorfismo y herencia en CDocument5 paginiPolimorfismo y herencia en CAlisson DuranÎncă nu există evaluări
- Universidad Nacional de Trujillo: Facultad de Ingeniería Programa de Ingeniería MecatrónicaDocument9 paginiUniversidad Nacional de Trujillo: Facultad de Ingeniería Programa de Ingeniería Mecatrónicafernando rodriguezÎncă nu există evaluări
- Continuous Oxygen Delivery Systems For The Acute Care of Infants, Children, and Adults - UpToDateDocument20 paginiContinuous Oxygen Delivery Systems For The Acute Care of Infants, Children, and Adults - UpToDateZxMijailxz CorreaÎncă nu există evaluări
- Procedimiento de Instalación de NOD32 Antivirus 4 Business EditionDocument6 paginiProcedimiento de Instalación de NOD32 Antivirus 4 Business EditionPablo Di'ron Paillao HerreraÎncă nu există evaluări
- Sanchez-Alexis - Tipos de InvestigaciónDocument1 paginăSanchez-Alexis - Tipos de InvestigaciónAlexis Sánchez MesaÎncă nu există evaluări
- 4.3 Memoria de CálculoDocument16 pagini4.3 Memoria de CálculoaderlyÎncă nu există evaluări