S-ar putea să vă placă și
- Model aeroplanes: The building of model monoplanes, biplanes, etc., together with a chapter on building a model airshipDe la EverandModel aeroplanes: The building of model monoplanes, biplanes, etc., together with a chapter on building a model airshipÎncă nu există evaluări
- Aerodynamic Flutter BannerDocument11 paginiAerodynamic Flutter BannerRavi TejaÎncă nu există evaluări
- Structural Dynamics: Aeroelasticity and FlutterDocument30 paginiStructural Dynamics: Aeroelasticity and FluttersreekanthÎncă nu există evaluări
- Study and Analysis On The Influence of Flutter FrequencyDocument7 paginiStudy and Analysis On The Influence of Flutter FrequencyJose Manuel Gonzalez ContrerasÎncă nu există evaluări
- Stability DerivativesDocument3 paginiStability DerivativesGurunath AeroÎncă nu există evaluări
- AirfoilsDocument63 paginiAirfoilsFabian TorresÎncă nu există evaluări
- Wind Sheer: It Is The Vertical Gradient in The Wind Velocity Developed Because of The FrictionDocument12 paginiWind Sheer: It Is The Vertical Gradient in The Wind Velocity Developed Because of The FrictionAnonymous 80p9OVÎncă nu există evaluări
- 11 Wind ShearDocument15 pagini11 Wind ShearFrederick OteikwuÎncă nu există evaluări
- Aeroelasticity Power Point.Document22 paginiAeroelasticity Power Point.Adrian Arasu0% (1)
- Wind PowerDocument66 paginiWind PowerArham QadeerÎncă nu există evaluări
- Flight DynamicsDocument12 paginiFlight Dynamicsthomasvictor2005Încă nu există evaluări
- Unit-5 Elements of Aeroelasticity by G.Velmurugan AP/AeroDocument21 paginiUnit-5 Elements of Aeroelasticity by G.Velmurugan AP/AeroveluÎncă nu există evaluări
- Cooling Technology Institute: Vibration Control: New Fan Blade Tip Reduces PulsationDocument14 paginiCooling Technology Institute: Vibration Control: New Fan Blade Tip Reduces PulsationMehul BansalÎncă nu există evaluări
- M Rotors Dreamw (Jupe)Document30 paginiM Rotors Dreamw (Jupe)acoxpelloÎncă nu există evaluări
- Introduction To AerodynamicsDocument7 paginiIntroduction To AerodynamicsTitter BuckÎncă nu există evaluări
- Aero Class #3 - Old BusinessDocument36 paginiAero Class #3 - Old BusinessSLÎncă nu există evaluări
- Bell Shaped Lift Distribution, Aerodynamic Soaring and Control Surface Dynamics of BirdsDocument8 paginiBell Shaped Lift Distribution, Aerodynamic Soaring and Control Surface Dynamics of BirdsIJRASETPublicationsÎncă nu există evaluări
- College of Engineering and Aeronautical TechnologyDocument6 paginiCollege of Engineering and Aeronautical TechnologyJohnzen Kim BaluyotÎncă nu există evaluări
- Ae 15707-Comprehension and Technical Seminar in Flight MechanicsDocument10 paginiAe 15707-Comprehension and Technical Seminar in Flight MechanicsGOWTHAMAN.DÎncă nu există evaluări
- Wind Power: Mohammed. N. KhanDocument21 paginiWind Power: Mohammed. N. KhanAvinesh ChandÎncă nu există evaluări
- Lecture 27 - FlutterDocument11 paginiLecture 27 - FlutterJony Oliver Lazo RamosÎncă nu există evaluări
- Design of Wing Model For Flutter Analysis: January 2022Document8 paginiDesign of Wing Model For Flutter Analysis: January 2022mohamed farmaanÎncă nu există evaluări
- Aeorodynamics of Rotor BladesDocument23 paginiAeorodynamics of Rotor BladesAshley_RulzzzzzzzÎncă nu există evaluări
- SUBSONIC AERODYNAMICS v9 03 21 2021 SIR FELIXDocument184 paginiSUBSONIC AERODYNAMICS v9 03 21 2021 SIR FELIXCap100% (1)
- Dolan & LehnDocument8 paginiDolan & LehnRajnish PatidarÎncă nu există evaluări
- AerodynamicsDocument16 paginiAerodynamicsSuman PalÎncă nu există evaluări
- Helicopter FundamentalsDocument66 paginiHelicopter FundamentalsYuvaraj Tingiri100% (1)
- Modeling of Aerodynamic Flutter On A NACA 4412 Airfoil Wind Blade (Final)Document7 paginiModeling of Aerodynamic Flutter On A NACA 4412 Airfoil Wind Blade (Final)Alfa BetaÎncă nu există evaluări
- Practical Lab # 6. Measurement of Drag and Lift of An Aerofoil at Different Angles of AttackDocument7 paginiPractical Lab # 6. Measurement of Drag and Lift of An Aerofoil at Different Angles of Attackamanuelfitsum589Încă nu există evaluări
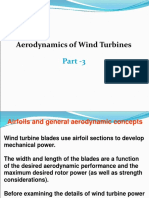
- Aerodynamics of Wind Turbines: Part - 3Document37 paginiAerodynamics of Wind Turbines: Part - 3John TauloÎncă nu există evaluări
- Aeroelasticity - WikipediaDocument6 paginiAeroelasticity - Wikipediazona amrullohÎncă nu există evaluări
- Static Aeroelasticity: I H I I BL H L H U LL LL L Ul I I L U I I L 1Document1 paginăStatic Aeroelasticity: I H I I BL H L H U LL LL L Ul I I L U I I L 1OSCARDELTAÎncă nu există evaluări
- Helicopdes PPT 7 Basic Helicopter AerodynamicsDocument46 paginiHelicopdes PPT 7 Basic Helicopter AerodynamicsastroNOTÎncă nu există evaluări
- SdarticleDocument17 paginiSdarticleNamanu PanaymthattaÎncă nu există evaluări
- The High-Speed Shape: by K. G. H e C K S (Hawker Siddeley Aviation LTD)Document1 paginăThe High-Speed Shape: by K. G. H e C K S (Hawker Siddeley Aviation LTD)volo87Încă nu există evaluări
- Aerodynamics Chapter 5Document86 paginiAerodynamics Chapter 5Keerthana MaheswarlaÎncă nu există evaluări
- BAN504 Flight Mechanics Unit IV NotesDocument32 paginiBAN504 Flight Mechanics Unit IV NotesBhura SinghÎncă nu există evaluări
- aeroelasticity-II-dynamic Aeroealsticity1Document181 paginiaeroelasticity-II-dynamic Aeroealsticity1Waseem SakhawatÎncă nu există evaluări
- Aerodynamics Course Notes v3Document253 paginiAerodynamics Course Notes v3Uribe AldoÎncă nu există evaluări
- FM 1-514 Principles of Helicopter FlightDocument59 paginiFM 1-514 Principles of Helicopter Flightwawaland100% (1)
- Assigment 1 - AE - 1RV18AS064Document11 paginiAssigment 1 - AE - 1RV18AS064MANDIRA GHOSHÎncă nu există evaluări
- Principles of FlightDocument54 paginiPrinciples of FlightHASSAN DADDAÎncă nu există evaluări
- Aircraft Stability and Control: Dhileeban 11AE60R18Document20 paginiAircraft Stability and Control: Dhileeban 11AE60R18Dhileeban SatÎncă nu există evaluări
- AirfoilDocument10 paginiAirfoilMahendranath RamakrishnanÎncă nu există evaluări
- AerodynamicsDocument6 paginiAerodynamicsAC SergioÎncă nu există evaluări
- Bridge Failures & DisastersDocument17 paginiBridge Failures & DisasterseliasjamhourÎncă nu există evaluări
- Aero Elasticity SeminarDocument24 paginiAero Elasticity SeminarAromalSPillai100% (1)
- Projek Sem Aku..mrsm..Document15 paginiProjek Sem Aku..mrsm..Dayang Siti Khalidah0% (1)
- Airfoil PDFDocument7 paginiAirfoil PDFGhulam mustafaÎncă nu există evaluări
- Control and Stability of AircraftDocument9 paginiControl and Stability of AircraftTiên NguyễnÎncă nu există evaluări
- CMET Knowledge Deficiency ReportDocument3 paginiCMET Knowledge Deficiency ReportwillshaÎncă nu există evaluări
- One Engine InoperativeDocument10 paginiOne Engine InoperativeJeeva's GamingÎncă nu există evaluări
- 1995 Embedded Vortices in Internal Flow Heat Transfer and Pressure Loss EnhancementDocument13 pagini1995 Embedded Vortices in Internal Flow Heat Transfer and Pressure Loss EnhancementArief RachmanÎncă nu există evaluări
- Aeroelasticity: Dr. Ugur Guven Aerospace Engineer (PHD) Nuclear Science and Technology Engineer (MSC)Document57 paginiAeroelasticity: Dr. Ugur Guven Aerospace Engineer (PHD) Nuclear Science and Technology Engineer (MSC)Pooja SharmaÎncă nu există evaluări
- Grdjev02i050196 PDFDocument9 paginiGrdjev02i050196 PDFसंकेत कलगुटकरÎncă nu există evaluări
- Effect of Dimples On Aircraft WingDocument9 paginiEffect of Dimples On Aircraft WingGRD JournalsÎncă nu există evaluări
- Aerodynamics Course Notes v3Document253 paginiAerodynamics Course Notes v3usakalamba100% (2)
- Pressure Vessel and Stacks Field Repair ManualDe la EverandPressure Vessel and Stacks Field Repair ManualEvaluare: 4 din 5 stele4/5 (4)
- Types of Forces and Laws - pdf-89Document8 paginiTypes of Forces and Laws - pdf-89shashankÎncă nu există evaluări
- PHYSICS 08&09 ChapterDocument76 paginiPHYSICS 08&09 ChapterPAVAN KUMARÎncă nu există evaluări
- 07 Capa LimiteDocument12 pagini07 Capa LimiteJesús Cabrera CamachoÎncă nu există evaluări
- Physics XI: Chapter 6: Fluid DynamicsDocument7 paginiPhysics XI: Chapter 6: Fluid DynamicsSamama FahimÎncă nu există evaluări
- Problem Set 1Document10 paginiProblem Set 1Naufal MR50% (2)
- The Physics of SoccerDocument16 paginiThe Physics of SoccerSharmila RajÎncă nu există evaluări
- Center of PercussionDocument3 paginiCenter of PercussionRahul MehraÎncă nu există evaluări
- Moment of InertiaDocument30 paginiMoment of InertiaNordiea Miller-youngeÎncă nu există evaluări
- Mechyr2 Chapter 8::: Further KinematicsDocument22 paginiMechyr2 Chapter 8::: Further KinematicsdnaielÎncă nu există evaluări
- Principles of Physics A Calculus Based Text 5Th Edition Serway Test Bank Full Chapter PDFDocument42 paginiPrinciples of Physics A Calculus Based Text 5Th Edition Serway Test Bank Full Chapter PDFJasonMoralesykcx100% (8)
- Smoke Flow Visualization Over A Delta WingDocument22 paginiSmoke Flow Visualization Over A Delta WingSharan Teja ElagandulaÎncă nu există evaluări
- EMU Phys101 Sample Old Exam PapersDocument113 paginiEMU Phys101 Sample Old Exam PapersAli ÖvgünÎncă nu există evaluări
- Conceptest Conceptest 6.1 6.1: Kinetic Energy Kinetic EnergyDocument10 paginiConceptest Conceptest 6.1 6.1: Kinetic Energy Kinetic Energyiza leopÎncă nu există evaluări
- Simulation of Slider Crank Mechanism Using Adams ViesDocument5 paginiSimulation of Slider Crank Mechanism Using Adams Vieskiran_wakchaureÎncă nu există evaluări
- Me6505 Dynamics of Machines SyllabusDocument1 paginăMe6505 Dynamics of Machines SyllabushariccetÎncă nu există evaluări
- Dynamics Midterm ExamDocument3 paginiDynamics Midterm ExamPenuel G. BantogÎncă nu există evaluări
- Gyroscope Theory of MachinesDocument33 paginiGyroscope Theory of Machinesadel audayÎncă nu există evaluări
- CP S HW CH 4Document8 paginiCP S HW CH 4nurhasanahÎncă nu există evaluări
- s2 Trgis Hours: Phvsics Midterm ExaminationDocument1 paginăs2 Trgis Hours: Phvsics Midterm ExaminationMhel LaurelÎncă nu există evaluări
- Fundamentals of Inviscid, Incompressible FlowDocument57 paginiFundamentals of Inviscid, Incompressible FlowpaariÎncă nu există evaluări
- 1202 Final Exam 2008Document11 pagini1202 Final Exam 2008Catarina MascarenhasÎncă nu există evaluări
- Sinusoidal Functions WorksheetDocument2 paginiSinusoidal Functions WorksheetPapijudaÎncă nu există evaluări
- S Ramp CalculationsDocument4 paginiS Ramp CalculationsRonald PeetersÎncă nu există evaluări
- Lab 4 Newtons First LawDocument4 paginiLab 4 Newtons First LawAndrew GomezÎncă nu există evaluări
- Satellite StabilizationDocument4 paginiSatellite Stabilizationshakti sindhuÎncă nu există evaluări
- Fizik Kertas 2 F4 PPT Fariz 2021 (Skema)Document4 paginiFizik Kertas 2 F4 PPT Fariz 2021 (Skema)Fariz FdzÎncă nu există evaluări
- 1st Stage Report On Hill Climbing Robot by Klanns MechanismDocument23 pagini1st Stage Report On Hill Climbing Robot by Klanns MechanismEDUMECH SOLUTIONÎncă nu există evaluări
- Worksheet 2 - Kinematic EquationsDocument2 paginiWorksheet 2 - Kinematic EquationsEye ShieldÎncă nu există evaluări
- Science SSCDocument6 paginiScience SSCMd Rizwan AhmadÎncă nu există evaluări
- Ultrasonic FormulaDocument12 paginiUltrasonic FormulaAbdalla Mohamed Abdalla50% (2)