S-ar putea să vă placă și
- Power Electronics Lab Manual1Document72 paginiPower Electronics Lab Manual1Harish SvÎncă nu există evaluări
- DC Machines Lab ManualDocument56 paginiDC Machines Lab ManualRockstar RichÎncă nu există evaluări
- ED LAB ManualDocument31 paginiED LAB Manualmanoj kumar100% (1)
- Drives and Control Lab ManualDocument36 paginiDrives and Control Lab ManualKabilanÎncă nu există evaluări
- Ac DrivesDocument36 paginiAc Drivesaswardi50% (2)
- Hopkinson Test On DC Shunt MotorDocument5 paginiHopkinson Test On DC Shunt MotorVarun VadluriÎncă nu există evaluări
- Closed Loop Control of Separately Excited DC MotorDocument13 paginiClosed Loop Control of Separately Excited DC MotorJAIRAJ MIRASHIÎncă nu există evaluări
- High VoltageDocument30 paginiHigh VoltageMohammed Mansoor100% (1)
- Magnetization Characteristics of A D.C. Shunt Generator: Exp. No: DateDocument60 paginiMagnetization Characteristics of A D.C. Shunt Generator: Exp. No: DateSuyash SinghÎncă nu există evaluări
- Solid State Controller of Drives - ExperimentDocument37 paginiSolid State Controller of Drives - ExperimentRakesh Singh LodhiÎncă nu există evaluări
- Ed Lab ManualDocument27 paginiEd Lab ManualBonnieÎncă nu există evaluări
- Control System Lab ManualDocument20 paginiControl System Lab ManualvaibhavÎncă nu există evaluări
- DR BU Static Rotor Resistance ControlDocument4 paginiDR BU Static Rotor Resistance ControlSameer GulshanÎncă nu există evaluări
- Variable Voltage & Frequency Controlled 3 Phase Induction MotorDocument6 paginiVariable Voltage & Frequency Controlled 3 Phase Induction MotorNAVEED ISHRAQÎncă nu există evaluări
- 17eel37 Eml Lab ManualDocument64 pagini17eel37 Eml Lab ManualpriyaÎncă nu există evaluări
- Control System Lab ManualDocument76 paginiControl System Lab ManualYuvaraj Shan50% (2)
- Steady-State Equivalent Circuit Modeling, Losses, and EfficiencyDocument20 paginiSteady-State Equivalent Circuit Modeling, Losses, and EfficiencyhassanÎncă nu există evaluări
- Electrical Machine-1 Manual PDFDocument40 paginiElectrical Machine-1 Manual PDFsoumencha80% (5)
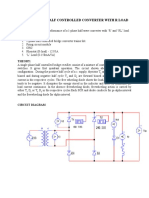
- Single Phase Half Controlled Converter With R LoadDocument3 paginiSingle Phase Half Controlled Converter With R LoadB ANIL KUMARÎncă nu există evaluări
- Experiment No.5-Determination of XD and XQ of Synchronous Machine by Slip TestDocument3 paginiExperiment No.5-Determination of XD and XQ of Synchronous Machine by Slip Test61EEPrabhat PalÎncă nu există evaluări
- Electric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, UttarakhandDocument15 paginiElectric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, Uttarakhandjaya mishraÎncă nu există evaluări
- Half Wave Rectification Experiment - 3: TheoryDocument10 paginiHalf Wave Rectification Experiment - 3: TheoryLakshayÎncă nu există evaluări
- Load Test DC Shunt GeneratorDocument3 paginiLoad Test DC Shunt Generatormani100% (2)
- Psim Interface Opal RTDocument33 paginiPsim Interface Opal RTtvs_krishnavarmaÎncă nu există evaluări
- Four Quadrant Operation of DC Drives: - Dual ConvertersDocument12 paginiFour Quadrant Operation of DC Drives: - Dual ConvertersDr.K.Krishna Veni ProfessorÎncă nu există evaluări
- Experiment 4 For B.electronicDocument12 paginiExperiment 4 For B.electronicUmmu Umar Wa AisyahÎncă nu există evaluări
- Power Electronics: Single Phase AC-AC ConvertersDocument18 paginiPower Electronics: Single Phase AC-AC ConvertersMaruti MohiteÎncă nu există evaluări
- Load Test On DC Shunt MotorDocument6 paginiLoad Test On DC Shunt Motorsanju0% (1)
- Power Electronics Controlled RectificationDocument13 paginiPower Electronics Controlled Rectificationkibrom atsbhaÎncă nu există evaluări
- Drives Manual Final EeeDocument60 paginiDrives Manual Final EeenandhakumarmeÎncă nu există evaluări
- Power Electronics Lab Manual PDFDocument41 paginiPower Electronics Lab Manual PDFSudhakar MarojuÎncă nu există evaluări
- MA-415 Industrial Drives Lab IndexDocument19 paginiMA-415 Industrial Drives Lab IndexMayankJainÎncă nu există evaluări
- Python Programming 2nd EditionDocument106 paginiPython Programming 2nd Editionshivanand_shettennav100% (1)
- V and Inverted V Curves of Synchronous MotorDocument7 paginiV and Inverted V Curves of Synchronous Motorkarthikeyan249Încă nu există evaluări
- Electrical Machines-II Lab ManualDocument52 paginiElectrical Machines-II Lab Manualsai100% (1)
- MP Electrical Drives Lab ManualDocument37 paginiMP Electrical Drives Lab ManualSoumiya Srinivasan100% (1)
- Phase-Controlled AC-DC Converters TutorialDocument3 paginiPhase-Controlled AC-DC Converters TutorialChangyuFuÎncă nu există evaluări
- Transformer On Load PDFDocument14 paginiTransformer On Load PDFSnr Berel ShepherdÎncă nu există evaluări
- RTU EE Control System Lab 5th SemDocument2 paginiRTU EE Control System Lab 5th SemBhuvneshRathore100% (1)
- 2019-20 HV Lab Manual Updated 078Document55 pagini2019-20 HV Lab Manual Updated 078madhulavÎncă nu există evaluări
- K-18el101 Edc Open Ended LabDocument7 paginiK-18el101 Edc Open Ended LabNoor SabaÎncă nu există evaluări
- VTU Guide Measures Resistance Using Wheatstone BridgeDocument18 paginiVTU Guide Measures Resistance Using Wheatstone Bridgevnyshreyas100% (2)
- Voltage Regulation of 3-Phase Alternator by ZPF and ASA MethodsDocument6 paginiVoltage Regulation of 3-Phase Alternator by ZPF and ASA Methods61EEPrabhat Pal100% (1)
- Matrix ConverterDocument17 paginiMatrix ConverterFatin RazakÎncă nu există evaluări
- ANNA UNIVERSITY PRACTICAL EXAM ON DC MACHINES AND TRANSFORMERSDocument4 paginiANNA UNIVERSITY PRACTICAL EXAM ON DC MACHINES AND TRANSFORMERSnandhakumarmeÎncă nu există evaluări
- Ec8361-Adc Lab ManualDocument118 paginiEc8361-Adc Lab ManualmuminthajÎncă nu există evaluări
- EM-I Lab Viva Questions Updated OnDocument6 paginiEM-I Lab Viva Questions Updated OnNagamohan BilluÎncă nu există evaluări
- Lab Manual Electrical Workshop4 IDocument47 paginiLab Manual Electrical Workshop4 Ishoaib ehsanÎncă nu există evaluări
- Swinburne'S Test: AIM: To Pre-Determine The Efficiency of A D.C Shunt Machine by PerformingDocument6 paginiSwinburne'S Test: AIM: To Pre-Determine The Efficiency of A D.C Shunt Machine by PerformingAshutosh SharmaÎncă nu există evaluări
- Control System Lab ManualDocument56 paginiControl System Lab ManualSrinivas Kondal Rao100% (3)
- Power Electronics Lab ManualDocument89 paginiPower Electronics Lab ManualPartha DewriÎncă nu există evaluări
- DC-DC Converter FundamentalsDocument63 paginiDC-DC Converter FundamentalsFaida HamidÎncă nu există evaluări
- Saraswathi Velu College of Engineering Power System AnalysisDocument59 paginiSaraswathi Velu College of Engineering Power System Analysissaran_0666100% (1)
- Light Intensity ControlDocument8 paginiLight Intensity ControlRaman GargÎncă nu există evaluări
- DC Servo Motor - MalDocument6 paginiDC Servo Motor - Malapi-19787379100% (1)
- Power ElectronicsDocument16 paginiPower ElectronicsPerumal NamasivayamÎncă nu există evaluări
- Power Electronics Lab Manual PDFDocument16 paginiPower Electronics Lab Manual PDFBiradar ShivshankerÎncă nu există evaluări
- Power Electronics Lab Manual Experiments on SCR, MOSFET, IGBT Characteristics and ApplicationsDocument34 paginiPower Electronics Lab Manual Experiments on SCR, MOSFET, IGBT Characteristics and ApplicationsanaatmandarthiÎncă nu există evaluări
- III I PE Lab ManualDocument138 paginiIII I PE Lab ManualRakibuzzaman TonmoyÎncă nu există evaluări
- Quiz 2Document2 paginiQuiz 2Punith Gowda M BÎncă nu există evaluări
- Final Project Report UAV Video Stabilization: CMPE264: Image Analysis and Computer VisionDocument11 paginiFinal Project Report UAV Video Stabilization: CMPE264: Image Analysis and Computer Visionmokhtariko1Încă nu există evaluări
- Digital Communication Unit 5 by Punith Kumar M BDocument61 paginiDigital Communication Unit 5 by Punith Kumar M BPunith Gowda M B0% (1)
- 13 Power DissipationDocument3 pagini13 Power DissipationPunith Gowda M BÎncă nu există evaluări
- Research Methodalogy SylabusDocument2 paginiResearch Methodalogy SylabusPunith Gowda M BÎncă nu există evaluări
- VLSIDocument66 paginiVLSIdenisberg18100% (1)
- Advanced Communication Lab Manual: Visvesvaraya Technological UniversityDocument46 paginiAdvanced Communication Lab Manual: Visvesvaraya Technological UniversityPunith Gowda M B100% (2)
- Previous Advertisement of IDBIDocument12 paginiPrevious Advertisement of IDBIAmit Kumar NarnauliaÎncă nu există evaluări
- 1punith Certificate Report P CDocument3 pagini1punith Certificate Report P CPunith Gowda M BÎncă nu există evaluări
- Visvesvaraya Technological UniversityDocument2 paginiVisvesvaraya Technological UniversityPunith Gowda M BÎncă nu există evaluări
- Advanced VLSI TechnologyDocument464 paginiAdvanced VLSI TechnologyRenfei LiuÎncă nu există evaluări
- Digital Communication Unit 1and Unit 2 by Punith KumarM B With LogoDocument53 paginiDigital Communication Unit 1and Unit 2 by Punith KumarM B With LogoPunith Gowda M BÎncă nu există evaluări
- Digital Communication Lab New Scheme ModifiedDocument48 paginiDigital Communication Lab New Scheme ModifiedseemarahulÎncă nu există evaluări
- Low Power Vlsi in CMOSDocument28 paginiLow Power Vlsi in CMOSavmeeeÎncă nu există evaluări
- Leakage Power Estimation in SRAMsDocument15 paginiLeakage Power Estimation in SRAMsapi-19668941Încă nu există evaluări
- Digital Electronics Lab ManualDocument108 paginiDigital Electronics Lab Manualkunaraj88% (17)
- CMOS VLSI DesignDocument71 paginiCMOS VLSI Designapi-19668941Încă nu există evaluări
- Low Power Design in VLSIDocument67 paginiLow Power Design in VLSIprathap13100% (1)
- Low Voltage Power DistributionDocument59 paginiLow Voltage Power DistributionPunith Gowda M BÎncă nu există evaluări
- VLSIDocument66 paginiVLSIdenisberg18100% (1)
- Low Power EstimationDocument82 paginiLow Power EstimationJoshua DuffyÎncă nu există evaluări
- 068-A BIST TPG For Low Power Dissipation and High Fault CoverageDocument13 pagini068-A BIST TPG For Low Power Dissipation and High Fault Coveragemsatreddy1100% (2)
- 001 Course OutlineDocument35 pagini001 Course OutlineJubin JainÎncă nu există evaluări
- VLSI System DesignDocument767 paginiVLSI System DesignMr_India100% (4)
- Physics of Power Dissipation in CMOS FET DevicesDocument70 paginiPhysics of Power Dissipation in CMOS FET DevicesPunith Gowda M BÎncă nu există evaluări
- Digital Comommunication For VtuDocument59 paginiDigital Comommunication For Vtu9964484036Încă nu există evaluări
- The Impact of Technology Scaling On Lifetime ReliabilityDocument10 paginiThe Impact of Technology Scaling On Lifetime ReliabilityPunith Gowda M BÎncă nu există evaluări
- DigitalCommthry Compiled KumarswamyDocument65 paginiDigitalCommthry Compiled KumarswamyPunith Gowda M BÎncă nu există evaluări
- DigitalCommthr Compiled SumaDocument68 paginiDigitalCommthr Compiled SumaPunith Gowda M BÎncă nu există evaluări
- Design and Techno-Economical Optimization For Hybrid PV-wind System Under Various Meteorological ConditionsDocument20 paginiDesign and Techno-Economical Optimization For Hybrid PV-wind System Under Various Meteorological Conditionsjun005Încă nu există evaluări
- High surge SCRs for power suppliesDocument5 paginiHigh surge SCRs for power suppliesHernan Vallenilla Rumildo MixÎncă nu există evaluări
- Mv185whb-N10-Etc 19m38aDocument26 paginiMv185whb-N10-Etc 19m38acarlos alberto hermidaÎncă nu există evaluări
- AMB4520R1 (G+Usplit)Document2 paginiAMB4520R1 (G+Usplit)Thaw GyiÎncă nu există evaluări
- Ground Check Monitors For Underground Power SystemsDocument8 paginiGround Check Monitors For Underground Power SystemsjorgeayreÎncă nu există evaluări
- TD Docomo IntegrationDocument3 paginiTD Docomo IntegrationVishal SuryawaniÎncă nu există evaluări
- Recuperar Driver GhostDocument3 paginiRecuperar Driver GhostainhoazalaÎncă nu există evaluări
- 800xa Outline - IO Systems - S800 IODocument20 pagini800xa Outline - IO Systems - S800 IOKourosh52Încă nu există evaluări
- Ilct6/ Mct6: Optocoupler, Phototransistor Output, Dual ChannelDocument8 paginiIlct6/ Mct6: Optocoupler, Phototransistor Output, Dual Channeli_need_moneyÎncă nu există evaluări
- Transformer Design AnalysisDocument6 paginiTransformer Design AnalysisAkash VermaÎncă nu există evaluări
- Radio Design Live Products Combiners and TMAsDocument1 paginăRadio Design Live Products Combiners and TMAsZiggy SmithÎncă nu există evaluări
- Tiger TO-92 Plastic Transistor SpecsDocument3 paginiTiger TO-92 Plastic Transistor SpecsVinod kumarÎncă nu există evaluări
- The Smart Grid - Enabling Energy Efficiency and Demand Response - C5Document20 paginiThe Smart Grid - Enabling Energy Efficiency and Demand Response - C5Kiên PhạmÎncă nu există evaluări
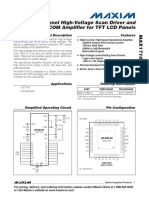
- 10-Channel High-Voltage Scan Driver and VCOM Amplifier For TFT LCD PanelsDocument10 pagini10-Channel High-Voltage Scan Driver and VCOM Amplifier For TFT LCD PanelsVinicius MarcosÎncă nu există evaluări
- ARINC 429 to Synchro Converter Model 44SM7Document3 paginiARINC 429 to Synchro Converter Model 44SM7ekinox_es100% (1)
- Isolating Switching Amplifier for 2 Channels Under 40 CharactersDocument3 paginiIsolating Switching Amplifier for 2 Channels Under 40 CharactersadrianioantomaÎncă nu există evaluări
- 2VAA000720R0001 A en S Control Harmony Bridge Controller With Ethernet (BRC-410) User ManualDocument95 pagini2VAA000720R0001 A en S Control Harmony Bridge Controller With Ethernet (BRC-410) User ManualanbarasanÎncă nu există evaluări
- Op and Tech-Gen2 Mnl-000003Document52 paginiOp and Tech-Gen2 Mnl-000003Salazar HCÎncă nu există evaluări
- 8 isolated DC output module with optical isolation and diode protectionDocument1 pagină8 isolated DC output module with optical isolation and diode protectionDelshad DuhokiÎncă nu există evaluări
- SF-2001-SureFire II High Energy Igniter (English) 2020-12-17Document24 paginiSF-2001-SureFire II High Energy Igniter (English) 2020-12-17akash kurheÎncă nu există evaluări
- Install Canon Sigma lens Rechip model B manualDocument6 paginiInstall Canon Sigma lens Rechip model B manualWiwy TransmitÎncă nu există evaluări
- Aalim Muhammed Salegh College of Engineering Digital Systems Design Lab RecordDocument67 paginiAalim Muhammed Salegh College of Engineering Digital Systems Design Lab Recordaafreen sadakÎncă nu există evaluări
- MR 198CVS Video Processor User Manual V1.0 20140505 PDFDocument120 paginiMR 198CVS Video Processor User Manual V1.0 20140505 PDFMauricio DiazÎncă nu există evaluări
- Introduction to DSP systems, pipelining and parallel processingDocument1 paginăIntroduction to DSP systems, pipelining and parallel processingNatheswaranÎncă nu există evaluări
- Chapter 8 State Space AnalysisDocument22 paginiChapter 8 State Space AnalysisAli AhmadÎncă nu există evaluări
- Physical Science: Quarter 2 - Week 5Document13 paginiPhysical Science: Quarter 2 - Week 5Cristian Steven Murillo100% (3)
- T 258Document62 paginiT 258Anonymous NYymdHgyÎncă nu există evaluări
- GSSI UtilityScanDFBrochure PDFDocument2 paginiGSSI UtilityScanDFBrochure PDFJoel AlonzoÎncă nu există evaluări
- Hrocat 8Document7 paginiHrocat 8Sparky73Încă nu există evaluări
- G550 - MTM - App ADocument31 paginiG550 - MTM - App Astive100% (1)