S-ar putea să vă placă și
- ME451 L14 TimeResp1st 240116 183517Document4 paginiME451 L14 TimeResp1st 240116 183517epe3630Încă nu există evaluări
- ME451 L15 Timeresp2nd 240116 183552Document6 paginiME451 L15 Timeresp2nd 240116 183552epe3630Încă nu există evaluări
- ME451: Control Systems Course RoadmapDocument6 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument4 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument5 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument3 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument3 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument5 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument5 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument4 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument6 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument4 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument4 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- MECH466: Automatic Control Course RoadmapDocument8 paginiMECH466: Automatic Control Course RoadmapMohamed MohamedÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument4 paginiME451: Control Systems Course RoadmapMarju LasluisaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument6 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- Chapter 8 ControlDocument96 paginiChapter 8 ControlDESHMUKH ANKIT PRAKASHRAOÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument4 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- Lecture PPT Digital ControlDocument8 paginiLecture PPT Digital ControlFarwaÎncă nu există evaluări
- Week 5 PDFDocument82 paginiWeek 5 PDFArnab RoyÎncă nu există evaluări
- Chapter - 5 - The Performance of Feedback Control Systems - W2015Document91 paginiChapter - 5 - The Performance of Feedback Control Systems - W2015120200421003nÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument3 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument5 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument5 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- Lecture-9 Time Domain Analysis of 1st Order SystemsDocument27 paginiLecture-9 Time Domain Analysis of 1st Order Systemsusama asifÎncă nu există evaluări
- Transient Stability 2Document15 paginiTransient Stability 2yonoka aldinugraha100% (1)
- ME451: Control Systems Course RoadmapDocument4 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- Advanced Electromechanical Systems Course Manual PDFDocument44 paginiAdvanced Electromechanical Systems Course Manual PDFAhmed M H Al-YousifÎncă nu există evaluări
- Feedback Control: Massachusetts Institute of Technology Subject 2.017Document12 paginiFeedback Control: Massachusetts Institute of Technology Subject 2.017Dr. Ir. R. Didin Kusdian, MT.Încă nu există evaluări
- LCS LecturesDocument220 paginiLCS LecturesfarazhumayunÎncă nu există evaluări
- Control Systems Course RoadmapDocument5 paginiControl Systems Course RoadmapRezkodaÎncă nu există evaluări
- Rrepetitive Controller BasicDocument23 paginiRrepetitive Controller BasicSuranjana DasÎncă nu există evaluări
- Time Response, ME451: Instructor: Jongeun ChoiDocument84 paginiTime Response, ME451: Instructor: Jongeun ChoiJpradha KamalÎncă nu există evaluări
- Time Domain Analysis of Control SystemDocument49 paginiTime Domain Analysis of Control Systemanasmos danielÎncă nu există evaluări
- ME L21 RootLocusLagDocument5 paginiME L21 RootLocusLagRezkodaÎncă nu există evaluări
- Control EngineeringDocument56 paginiControl EngineeringDiShanÎncă nu există evaluări
- Transient and Steady State ResponseDocument24 paginiTransient and Steady State ResponseYasir DawoodÎncă nu există evaluări
- An Introduction To Control Theory With Applications To Computer ScienceDocument46 paginiAn Introduction To Control Theory With Applications To Computer Sciencecleytonmarques1991Încă nu există evaluări
- Control Technology: Department of Engineering TechnologyDocument55 paginiControl Technology: Department of Engineering TechnologyTaha AmerÎncă nu există evaluări
- First-Order System 2002Document19 paginiFirst-Order System 2002Md Mainul Hsoen ImonÎncă nu există evaluări
- Control Engineering2 - CDocument44 paginiControl Engineering2 - CMihaelaÎncă nu există evaluări
- PID Control - KeyDocument50 paginiPID Control - KeyHaozhi LiÎncă nu există evaluări
- Chapter 11Document48 paginiChapter 11Farooq AhmadÎncă nu există evaluări
- ME2142C5 162 System ResponseDocument41 paginiME2142C5 162 System Responsejustinwong12337Încă nu există evaluări
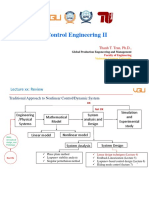
- Control Engineering II: Thanh T. Tran, PH.D.Document36 paginiControl Engineering II: Thanh T. Tran, PH.D.Thiên BùiÎncă nu există evaluări
- Time RespDocument13 paginiTime RespAvi SharanÎncă nu există evaluări
- 3.syllabus RubricsDocument5 pagini3.syllabus RubricsSomesh MuruganÎncă nu există evaluări
- Week 2Document90 paginiWeek 2Raising StarÎncă nu există evaluări
- 3.state Space ModelingDocument169 pagini3.state Space ModelingMekonnen ShewaregaÎncă nu există evaluări
- Design Optimization For Power-Supplying The Nodes of WSNs - Master Thesis Presentation - Ioannis MandourarakisDocument51 paginiDesign Optimization For Power-Supplying The Nodes of WSNs - Master Thesis Presentation - Ioannis MandourarakisIoannis MandourarakisÎncă nu există evaluări
- Design of Control Systems: Case StudiesDocument35 paginiDesign of Control Systems: Case StudiesRaf IsmailÎncă nu există evaluări
- RT-Lab Based Real-Time Simulation of A Direct Field-Oriented Controller For An Induction MotorDocument6 paginiRT-Lab Based Real-Time Simulation of A Direct Field-Oriented Controller For An Induction MotorMagpie 2023Încă nu există evaluări
- Online Control Lecture #1Document47 paginiOnline Control Lecture #1Noor GamingÎncă nu există evaluări
- Transient Response AnalysisDocument23 paginiTransient Response AnalysisAsif JavedÎncă nu există evaluări
- Control Systems (9171)Document5 paginiControl Systems (9171)Victoria Franco0% (1)
- EE5103/ME5403 Lecture Four Pole-Placement Problem State-Space ApproachDocument46 paginiEE5103/ME5403 Lecture Four Pole-Placement Problem State-Space ApproachFeiÎncă nu există evaluări
- Time ResponseDocument84 paginiTime ResponseDhyan PatelÎncă nu există evaluări
- ME L19 RootLocusMultiparaDocument4 paginiME L19 RootLocusMultiparaRezkodaÎncă nu există evaluări
- TPTVC/1.5KW: Computer Controlled 1.5 KW Steam Power Plant, With SCADA and PID ControlDocument13 paginiTPTVC/1.5KW: Computer Controlled 1.5 KW Steam Power Plant, With SCADA and PID ControlVu NghiaÎncă nu există evaluări
- D D D D D D D D: Description/ordering InformationDocument24 paginiD D D D D D D D: Description/ordering InformationVu NghiaÎncă nu există evaluări
- How Do I Write A Body Paragraph (S)Document11 paginiHow Do I Write A Body Paragraph (S)Vu NghiaÎncă nu există evaluări
- What Makes A Good or Bad Presentation (S)Document15 paginiWhat Makes A Good or Bad Presentation (S)Vu NghiaÎncă nu există evaluări
- Using A Model Report (S)Document10 paginiUsing A Model Report (S)Vu NghiaÎncă nu există evaluări
- Logix5000 Controllers Function Block Diagram: Programming ManualDocument33 paginiLogix5000 Controllers Function Block Diagram: Programming ManualVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument5 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument5 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument3 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument4 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument5 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument4 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument5 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- Frequency Response Example:: S S S K KGHDocument11 paginiFrequency Response Example:: S S S K KGHVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument5 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument6 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument4 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument4 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument5 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Automatic Control Course RoadmapDocument5 paginiME451: Automatic Control Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument6 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument4 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- 25 PDFDocument7 pagini25 PDFVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument4 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument3 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument5 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- ME451: Control Systems Course RoadmapDocument3 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- 8 Final English Grade 5 Week 8 Second QuarterDocument10 pagini8 Final English Grade 5 Week 8 Second QuarterEugene Picazo100% (1)
- Samsung MobileDocument5 paginiSamsung Mobilehussainshadat262Încă nu există evaluări
- User Manual: How To Use It?Document5 paginiUser Manual: How To Use It?ariel marinÎncă nu există evaluări
- ITE v7 Instructor Packet Tracer ManualDocument17 paginiITE v7 Instructor Packet Tracer ManualWaldon HendricksÎncă nu există evaluări
- Brksec 3383Document93 paginiBrksec 3383Prasenjit BiswasÎncă nu există evaluări
- Maths Form 1 End TermDocument6 paginiMaths Form 1 End Termparmeet singh100% (1)
- Chapter 1 An Introduction To Cybercrimes and Environmental Laws and ProtectionDocument6 paginiChapter 1 An Introduction To Cybercrimes and Environmental Laws and Protectionjoven balisiÎncă nu există evaluări
- Monitor AOC 936SWADocument61 paginiMonitor AOC 936SWAAntonioPeriniÎncă nu există evaluări
- Instant Download Plates and Shells Theory and Analysis 4th Ugural Solution Manual PDF ScribdDocument11 paginiInstant Download Plates and Shells Theory and Analysis 4th Ugural Solution Manual PDF Scribdantoniowagnercrqampebwt100% (15)
- CP18 ManualDocument72 paginiCP18 Manualkomalinternational5Încă nu există evaluări
- Redundancy: Chapter 4, "Troubleshooting."Document11 paginiRedundancy: Chapter 4, "Troubleshooting."halflife135Încă nu există evaluări
- How To Use Ajax in WordPress - A Real World Example - SitePointDocument15 paginiHow To Use Ajax in WordPress - A Real World Example - SitePointJean claude onanaÎncă nu există evaluări
- NLP Project ReportDocument27 paginiNLP Project ReportNitin kumar singhÎncă nu există evaluări
- Print Final Report1Document57 paginiPrint Final Report1oromosÎncă nu există evaluări
- Computer Science Report 2Document19 paginiComputer Science Report 2Brownson Succex JuniorÎncă nu există evaluări
- Elements of Political CommunicationDocument2 paginiElements of Political CommunicationPantatNyanehBurik0% (1)
- 15-Heat Stress PlanDocument2 pagini15-Heat Stress PlanKhan MuhammadÎncă nu există evaluări
- CPSP QuestionsDocument19 paginiCPSP QuestionsAn MaiÎncă nu există evaluări
- AT89C51Document24 paginiAT89C51Kavin SengodanÎncă nu există evaluări
- GTA Shark CardsDocument10 paginiGTA Shark CardsSteveNoirÎncă nu există evaluări
- RX8200 DatasheetDocument12 paginiRX8200 DatasheetCharlie TNÎncă nu există evaluări
- CSS 11 Module - LESSON 6Document8 paginiCSS 11 Module - LESSON 6RICKELY BANTA100% (1)
- Project On Covid DataDocument5 paginiProject On Covid DataDeepesh YadavÎncă nu există evaluări
- 840 D ProtectionLevel ConceptDocument8 pagini840 D ProtectionLevel ConceptNica BogdanÎncă nu există evaluări
- Spa Pcdmis 2015.1 CMM ManualDocument332 paginiSpa Pcdmis 2015.1 CMM ManualIbai Zabala BengoaÎncă nu există evaluări
- Schemes of Work Lower SixDocument37 paginiSchemes of Work Lower SixDELTON ZARANYIKAÎncă nu există evaluări
- Session 1Document37 paginiSession 1Abhijit SinhaÎncă nu există evaluări
- Recipient of DCP Survey and Monitoring Checklist 1Document4 paginiRecipient of DCP Survey and Monitoring Checklist 1Rodjone BinondoÎncă nu există evaluări
- Cyber Security Framework V1.0Document39 paginiCyber Security Framework V1.0santanujoshiÎncă nu există evaluări
- Rikansha Ria Kumar Year 13Document20 paginiRikansha Ria Kumar Year 13rikanshaÎncă nu există evaluări