S-ar putea să vă placă și
- Landscape: Circulation N SpaceDocument18 paginiLandscape: Circulation N SpaceRamsraj60% (5)
- Experience in ArchitectureDocument10 paginiExperience in ArchitecturePrapti RakhasiaÎncă nu există evaluări
- Architectural Trends at Transit HubsDocument95 paginiArchitectural Trends at Transit HubsKannha AggarwalÎncă nu există evaluări
- Mathematics For Architecture - Unit 2Document18 paginiMathematics For Architecture - Unit 2Jade CortezÎncă nu există evaluări
- Lecture-3 Scales PDFDocument29 paginiLecture-3 Scales PDFkiran kumarÎncă nu există evaluări
- FORM Theory of ArchDocument18 paginiFORM Theory of ArchAbuzaid MohamedÎncă nu există evaluări
- Marcos NovakDocument21 paginiMarcos NovakArunagiri Kongu-UsecÎncă nu există evaluări
- Built Environment AND Spatial CultureDocument52 paginiBuilt Environment AND Spatial CultureUmesh IndoriyaÎncă nu există evaluări
- Glass Architecture - Unit 1 - Types of GlassDocument18 paginiGlass Architecture - Unit 1 - Types of GlassPriya PriyaÎncă nu există evaluări
- Unit 1 Architecture - Its ElementsDocument132 paginiUnit 1 Architecture - Its ElementsJennifer PaulÎncă nu există evaluări
- Synopsis-Experiencing LightDocument5 paginiSynopsis-Experiencing LightRAVI VARMAÎncă nu există evaluări
- Architecture - WikipediaDocument15 paginiArchitecture - WikipediaFirmansyahÎncă nu există evaluări
- Unit 3Document133 paginiUnit 3Tamilvanan GovindanÎncă nu există evaluări
- Bionic ArchitectureDocument45 paginiBionic ArchitectureAllaÎncă nu există evaluări
- Exploring Parametric Design in An Urban Planning 1Document27 paginiExploring Parametric Design in An Urban Planning 1audreyÎncă nu există evaluări
- Introduction To Landscape ArchitectureDocument22 paginiIntroduction To Landscape Architecturegurleen malhotraÎncă nu există evaluări
- Understanding Transition Spaces PDFDocument33 paginiUnderstanding Transition Spaces PDFVikas VarmaÎncă nu există evaluări
- Indian ArchitectsDocument27 paginiIndian ArchitectsSharvari MateÎncă nu există evaluări
- Research PaperDocument34 paginiResearch PaperSunaina ChauhanÎncă nu există evaluări
- Storytelling Through ArchitectureDocument67 paginiStorytelling Through ArchitectureArchiesivan22Încă nu există evaluări
- Evolutions of ArchitectureDocument7 paginiEvolutions of ArchitectureLorena GheorghiuÎncă nu există evaluări
- Design Brief Understanding Daylight MetricsDocument32 paginiDesign Brief Understanding Daylight Metricsbenjyy2008Încă nu există evaluări
- Site Planning and LandscapingDocument24 paginiSite Planning and LandscapingSnigdha BurmanÎncă nu există evaluări
- Parasitic Architecture 1Document11 paginiParasitic Architecture 1api-398373071Încă nu există evaluări
- Thesis - Biomimicry in Environmental Architecture PDFDocument330 paginiThesis - Biomimicry in Environmental Architecture PDFJosielynÎncă nu există evaluări
- Interrelationship of Public SpacesDocument10 paginiInterrelationship of Public Spacesmimk2014Încă nu există evaluări
- Lecture - Definition of Space and SpatialityDocument57 paginiLecture - Definition of Space and Spatialitymert avlarÎncă nu există evaluări
- Orphans in IndiaDocument24 paginiOrphans in IndiaNidhi KhuranaÎncă nu există evaluări
- Conservation Studio 2023 - B.ArchDocument238 paginiConservation Studio 2023 - B.ArchSeason ShakyaÎncă nu există evaluări
- Review of Mind in Architecture - Neuroscience, Embodiment, and The Future of DesignDocument5 paginiReview of Mind in Architecture - Neuroscience, Embodiment, and The Future of DesignOliveira JúniorÎncă nu există evaluări
- Architecture and Autism: DissertationDocument19 paginiArchitecture and Autism: DissertationAditi guptaÎncă nu există evaluări
- FORM AND SPACE - Vertical PlanesDocument20 paginiFORM AND SPACE - Vertical Planeskarthika manoharanÎncă nu există evaluări
- Thesis ReportDocument96 paginiThesis Reportvasist100% (3)
- Seating Spaces On Public Spaces - Architectural Dissertation-Janeebha MahthabDocument65 paginiSeating Spaces On Public Spaces - Architectural Dissertation-Janeebha MahthabJANEEBAÎncă nu există evaluări
- Unit 1 Urban Space & ComponentsDocument17 paginiUnit 1 Urban Space & ComponentsMinmini shanthiÎncă nu există evaluări
- Landscape Unit 1 JsDocument24 paginiLandscape Unit 1 Jsdrizzy poolÎncă nu există evaluări
- Architecture and Human Psychology: Research MethodologyDocument11 paginiArchitecture and Human Psychology: Research MethodologyNishanaÎncă nu există evaluări
- Pointers To The Future of DesignDocument6 paginiPointers To The Future of DesignUday DandavateÎncă nu există evaluări
- Thesis Guide ListDocument3 paginiThesis Guide ListShweta Sharma100% (1)
- Bell Work-Review: What Are The Three Types of Floor Plans?Document11 paginiBell Work-Review: What Are The Three Types of Floor Plans?ASHUTOSH KUMAR VERMAÎncă nu există evaluări
- Final Contour Site Brief-25.12.16Document5 paginiFinal Contour Site Brief-25.12.16saileeÎncă nu există evaluări
- Lecture 4 - Out Door Space and Its CharcteristicsDocument31 paginiLecture 4 - Out Door Space and Its CharcteristicsRewaa MerwadÎncă nu există evaluări
- Context by ArchitectureDocument34 paginiContext by ArchitecturePrince JariwalaÎncă nu există evaluări
- Musi River Brige DesginDocument10 paginiMusi River Brige DesginM S KumarÎncă nu există evaluări
- Analogies in ArchitectureDocument51 paginiAnalogies in ArchitectureSushant ChandekarÎncă nu există evaluări
- 13 - Chapter 2Document31 pagini13 - Chapter 2Sambit MishraÎncă nu există evaluări
- Form and SpaceDocument12 paginiForm and SpacePriscilla Yesenia AnugraheniÎncă nu există evaluări
- Landscape Architecture Lecture 5Document36 paginiLandscape Architecture Lecture 5Ali WAHEEDÎncă nu există evaluări
- Complex Architectural FormsDocument19 paginiComplex Architectural FormsIbie Scandie Shain QuimanÎncă nu există evaluări
- 00 Neufert 3 EditionDocument638 pagini00 Neufert 3 EditionPolloGalletti100% (1)
- Built Environment and SustainabilityDocument45 paginiBuilt Environment and SustainabilityHamza Ashraf0% (1)
- Shading 1Document9 paginiShading 1shanto tpiÎncă nu există evaluări
- AnthropometryDocument4 paginiAnthropometryGeline EsguerraÎncă nu există evaluări
- Anthropometry Lesson Plan PDFDocument2 paginiAnthropometry Lesson Plan PDFparul vyas0% (1)
- Form and Space in Architceture NotesDocument17 paginiForm and Space in Architceture NotesGee CeeÎncă nu există evaluări
- Phenomena of PerceptionDocument36 paginiPhenomena of PerceptionAarthyÎncă nu există evaluări
- M.Arch Thesis ReportDocument140 paginiM.Arch Thesis Report2018 mco67% (3)
- Sustainable Thesis SynopsisDocument6 paginiSustainable Thesis SynopsisScoobru SummerÎncă nu există evaluări
- Udpfi Guidlines For HousingDocument21 paginiUdpfi Guidlines For HousingGayathri. M.KÎncă nu există evaluări
- Aravind 500195259 Async AssignmentDocument5 paginiAravind 500195259 Async AssignmentAravind Kumar ReddyÎncă nu există evaluări
- The Evolution of Urban Design: From The Ancient World To The Modern Metropolis #GHI789Document4 paginiThe Evolution of Urban Design: From The Ancient World To The Modern Metropolis #GHI789Antonio C. KeithÎncă nu există evaluări
- FuturaVista 8165Document6 paginiFuturaVista 8165Antonio C. KeithÎncă nu există evaluări
- EcoSphere 4321Document6 paginiEcoSphere 4321Antonio C. KeithÎncă nu există evaluări
- Preserving The Past: The Role of Historic Preservation in Architecture #MNO345Document5 paginiPreserving The Past: The Role of Historic Preservation in Architecture #MNO345Antonio C. KeithÎncă nu există evaluări
- The Impact of Technology On Modern Architecture #ABC123Document4 paginiThe Impact of Technology On Modern Architecture #ABC123Antonio C. KeithÎncă nu există evaluări
- Urban Oasis-6934Document6 paginiUrban Oasis-6934Antonio C. KeithÎncă nu există evaluări
- Redefine 101Document6 paginiRedefine 101Antonio C. KeithÎncă nu există evaluări
- Pardigmas 2Document5 paginiPardigmas 2Antonio C. KeithÎncă nu există evaluări
- Horizon 123Document10 paginiHorizon 123Antonio C. KeithÎncă nu există evaluări
- Play 789Document6 paginiPlay 789Antonio C. KeithÎncă nu există evaluări
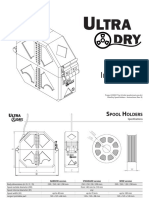
- UltraDry Spool Holders - Instructions PDFDocument15 paginiUltraDry Spool Holders - Instructions PDFAntonio C. KeithÎncă nu există evaluări
- Mix 456Document6 paginiMix 456Antonio C. KeithÎncă nu există evaluări
- Norm 456Document6 paginiNorm 456Antonio C. KeithÎncă nu există evaluări
- CopperToxicity PDFDocument7 paginiCopperToxicity PDFAntonio C. KeithÎncă nu există evaluări
- Civitai ApiDocument17 paginiCivitai ApiAntonio C. KeithÎncă nu există evaluări
- Export Codex Ashburnham Facsimile PDFDocument1 paginăExport Codex Ashburnham Facsimile PDFAntonio C. KeithÎncă nu există evaluări
- Information Codes of Mutant Forms: Arch. Bojan BaleticDocument15 paginiInformation Codes of Mutant Forms: Arch. Bojan BaleticAntonio C. KeithÎncă nu există evaluări
- Dingledy The Corpus Juris Civilis A Guide To Its History and Use Accepted Manuscript VersionDocument41 paginiDingledy The Corpus Juris Civilis A Guide To Its History and Use Accepted Manuscript VersionAntonio C. KeithÎncă nu există evaluări
- CopperToxicity PDFDocument7 paginiCopperToxicity PDFAntonio C. KeithÎncă nu există evaluări
- History of CAD - CAE CompaniesDocument5 paginiHistory of CAD - CAE CompaniesAntonio C. KeithÎncă nu există evaluări
- DA PAM 415 28 Guide To Army Real Property Category CodesDocument483 paginiDA PAM 415 28 Guide To Army Real Property Category CodesAntonio C. Keith100% (1)
- tp132 c2 PDFDocument9 paginitp132 c2 PDFAntonio C. KeithÎncă nu există evaluări
- Discrete Shells: Eurographics/SIGGRAPH Symposium On Computer Animation (2003) D. Breen, M. Lin (Editors)Document7 paginiDiscrete Shells: Eurographics/SIGGRAPH Symposium On Computer Animation (2003) D. Breen, M. Lin (Editors)Antonio C. KeithÎncă nu există evaluări
- StarCraft II A New Challenge For Reinforcement LearningDocument20 paginiStarCraft II A New Challenge For Reinforcement LearningAntonio C. KeithÎncă nu există evaluări
- Samplechapter CountingprinciplesDocument151 paginiSamplechapter CountingprinciplesbmandarÎncă nu există evaluări
- Grade 2 DLL MATH 2 Q4 Week 8Document12 paginiGrade 2 DLL MATH 2 Q4 Week 8Chad Dela CruzÎncă nu există evaluări
- Summary of CS1231Document4 paginiSummary of CS1231Khor Shi-JieÎncă nu există evaluări
- Analysis and Design of Algorithm Lecture NotesDocument337 paginiAnalysis and Design of Algorithm Lecture NotesEfrain Sanjay AdhikaryÎncă nu există evaluări
- Graph Coloring - WikipediaDocument96 paginiGraph Coloring - WikipediaAnvar M KayaradiÎncă nu există evaluări
- MTH202 Short Questions AnswersDocument24 paginiMTH202 Short Questions Answerscs619finalproject.com67% (3)
- Data Structures: Unit III - Part 4 Bca, NGMCDocument10 paginiData Structures: Unit III - Part 4 Bca, NGMCSanthosh kumar KÎncă nu există evaluări
- Theory GraphDocument23 paginiTheory GraphArthur CarabioÎncă nu există evaluări
- Computational Complexity TheoryDocument6 paginiComputational Complexity TheoryIndra Budhi KurniawanÎncă nu există evaluări
- DAALAB - 1902629 - Hritik SharmaDocument51 paginiDAALAB - 1902629 - Hritik SharmaXavier KingdomÎncă nu există evaluări
- T0 - Space Syntax MethodologyDocument118 paginiT0 - Space Syntax Methodologyquraisha shaÎncă nu există evaluări
- Graph Data Mining: Slides Are Modified From Jiawei Han & Micheline KamberDocument37 paginiGraph Data Mining: Slides Are Modified From Jiawei Han & Micheline KamberharshaÎncă nu există evaluări
- 1 - Introduction To GraphsDocument28 pagini1 - Introduction To GraphsDigvijay Singh KathuriaÎncă nu există evaluări
- Module 3 - DAA VtuDocument80 paginiModule 3 - DAA VtuSATYAM JHAÎncă nu există evaluări
- v1-21CS37-DMS-question BankDocument10 paginiv1-21CS37-DMS-question BankSanthosh Y MÎncă nu există evaluări
- Frank Harary - Graph TheoryDocument281 paginiFrank Harary - Graph TheoryNandan50% (4)
- Algo Problems For LearningDocument2 paginiAlgo Problems For LearningwebtoolkitÎncă nu există evaluări
- Graph-1 BfsDocument40 paginiGraph-1 BfsNuzhat AfrinÎncă nu există evaluări
- Uses of Mathematics in Daily LifeDocument27 paginiUses of Mathematics in Daily LifeRishav DikshitÎncă nu există evaluări
- Discreet MathsDocument64 paginiDiscreet MathsCRi GB80% (5)
- Scrum Half1Document18 paginiScrum Half1Zarul ZahariÎncă nu există evaluări
- On The Mathematics of Flat Origami - HullDocument10 paginiOn The Mathematics of Flat Origami - HullGugaKlingÎncă nu există evaluări
- Graphs in Sage MathDocument874 paginiGraphs in Sage Mathelham100% (1)
- Assignment 1Document2 paginiAssignment 1Arnab RayÎncă nu există evaluări
- Detail Syllabus BSC Mathematics Syllabus Sem 5Document9 paginiDetail Syllabus BSC Mathematics Syllabus Sem 5Laksh JainÎncă nu există evaluări
- Water Distribution Valve Topology ForDocument7 paginiWater Distribution Valve Topology ForbryesanggalangÎncă nu există evaluări
- Structure Learning in Graphical ModelingDocument28 paginiStructure Learning in Graphical ModelingNick NikzadÎncă nu există evaluări
- KL PartitioningDocument29 paginiKL Partitioningjakk234Încă nu există evaluări
- Level: K1 Knowledge K2 Understand K3 Apply K4 Analyse K5 Evaluate K6 CreateDocument2 paginiLevel: K1 Knowledge K2 Understand K3 Apply K4 Analyse K5 Evaluate K6 CreateSoma SundaramÎncă nu există evaluări
- Advanced Programme Maths P2 2019Document14 paginiAdvanced Programme Maths P2 2019Jack WilliamsÎncă nu există evaluări