S-ar putea să vă placă și
- Download Tally Ledger List in ExcelDocument7 paginiDownload Tally Ledger List in ExcelAnonymous 3yqNzCxtTz100% (1)
- Bombardier CRJ 200-Flight ControlsDocument52 paginiBombardier CRJ 200-Flight Controlscatani11100% (1)
- The Best Twenty Six Project With The Arduino PDFDocument247 paginiThe Best Twenty Six Project With The Arduino PDFmonkbernal100% (2)
- B767 200-300 BOOK 22 301 - Autoflight - IntroductionDocument32 paginiB767 200-300 BOOK 22 301 - Autoflight - IntroductionTarik Benzineb100% (4)
- EASA B1.1: Aircraft flight control systemsDocument187 paginiEASA B1.1: Aircraft flight control systemsTahnia AyshiÎncă nu există evaluări
- Airbus A380 Flight Surfaces Controls and Back Up SDocument33 paginiAirbus A380 Flight Surfaces Controls and Back Up SArasophy100% (4)
- Projects With Microcontrollers And PICCDe la EverandProjects With Microcontrollers And PICCEvaluare: 5 din 5 stele5/5 (1)
- ATR Ata - 27 - Flight - ControlsDocument132 paginiATR Ata - 27 - Flight - ControlsJesús Montalvo FernándezÎncă nu există evaluări
- Un Giroscopio: Materiales DroneDocument9 paginiUn Giroscopio: Materiales DroneJuan Carlos VásquezÎncă nu există evaluări
- DSPIC30f2010 C Code SanjayDocument16 paginiDSPIC30f2010 C Code SanjayMian Fahim75% (8)
- Financial Management - Text, Problems & Cases - M.Y Khan & P.K. JainDocument3 paginiFinancial Management - Text, Problems & Cases - M.Y Khan & P.K. JainSantosh Nath100% (1)
- Financial Management - Text, Problems & Cases - M.Y Khan & P.K. JainDocument3 paginiFinancial Management - Text, Problems & Cases - M.Y Khan & P.K. JainSantosh Nath100% (1)
- Pilot Training Cn235Document264 paginiPilot Training Cn235Muhammad YusufÎncă nu există evaluări
- PIR Motion Sensor AlarmDocument46 paginiPIR Motion Sensor AlarmSyad AlyÎncă nu există evaluări
- Aircraft Control Surface SystemDocument11 paginiAircraft Control Surface SystemAdvaith ShettyÎncă nu există evaluări
- Codigo BalancingDocument4 paginiCodigo BalancingPablo AlvarezÎncă nu există evaluări
- PID-kirjaston tuonti ja saatimen määritysDocument8 paginiPID-kirjaston tuonti ja saatimen määritysSam Fisher LambertÎncă nu există evaluări
- IK_BALANCINGDocument7 paginiIK_BALANCINGTanner DuncanÎncă nu există evaluări
- TP3 - FFT en C Con MXUXpressoDocument5 paginiTP3 - FFT en C Con MXUXpressoFederico CarrilloÎncă nu există evaluări
- Obstacle Avoid RobotDocument4 paginiObstacle Avoid RobotRobby surya f100% (1)
- Ecen90 Robot Arle HernandezDocument12 paginiEcen90 Robot Arle HernandezCenon Lumabad IIIÎncă nu există evaluări
- Basis CodesDocument15 paginiBasis CodesJholo LopezÎncă nu există evaluări
- Evse ChargerDocument17 paginiEvse ChargerdkvnsyvkgbÎncă nu există evaluări
- Display "Hello World"message Using Internal UARTDocument16 paginiDisplay "Hello World"message Using Internal UARTAkshathaÎncă nu există evaluări
- DcmotorDocument15 paginiDcmotorapi-397492879Încă nu există evaluări
- ADC-DHT11 CDocument7 paginiADC-DHT11 CGiancarloÎncă nu există evaluări
- #Include #Include #Include : Int Int Int Int IntDocument9 pagini#Include #Include #Include : Int Int Int Int IntĐông NguyễnÎncă nu există evaluări
- CODIGOS DISEýýO MECATRONICODocument25 paginiCODIGOS DISEýýO MECATRONICOOscar Olvera HernandezÎncă nu există evaluări
- PROGRAMA AUDUINO Auto Con GruaDocument4 paginiPROGRAMA AUDUINO Auto Con GruaMarcelo VargasÎncă nu există evaluări
- "DSP28x - Project.h" : #Include #IncludeDocument10 pagini"DSP28x - Project.h" : #Include #IncludeAkshayÎncă nu există evaluări
- Microcontrolleurs: Marin IulianaDocument11 paginiMicrocontrolleurs: Marin IulianaCoop ZkuberveitÎncă nu există evaluări
- Скетч от неизвестногоDocument3 paginiСкетч от неизвестногоLaserskayaÎncă nu există evaluări
- The Ultrasonic SensorDocument14 paginiThe Ultrasonic SensorAdalberto Sharpley100% (1)
- EeDocument12 paginiEepriyaÎncă nu există evaluări
- Bluetooth RC RobotDocument3 paginiBluetooth RC RobotOJ AlazzawiÎncă nu există evaluări
- Lab06 - Smart Home Automation Using SensorsDocument14 paginiLab06 - Smart Home Automation Using SensorsChâu Trần100% (1)
- Code UDocument4 paginiCode Ukaloy33Încă nu există evaluări
- Driver Motor - InoDocument3 paginiDriver Motor - InoJohn Bryan LanguidoÎncă nu există evaluări
- SpeedControl InoDocument3 paginiSpeedControl InoOuail MakhebiÎncă nu există evaluări
- SodaPDF-converted-Si5351 RXTX VFO V3Document12 paginiSodaPDF-converted-Si5351 RXTX VFO V3LU8DIW Roberto MartinezÎncă nu există evaluări
- WiFi Robot Remo-WPS OfficeDocument11 paginiWiFi Robot Remo-WPS OfficeJohn Bryan LanguidoÎncă nu există evaluări
- Heliberto FinalDocument7 paginiHeliberto FinalAlvaro ZapataÎncă nu există evaluări
- CodenghiencuuDocument7 paginiCodenghiencuuNhat NguyenÎncă nu există evaluări
- BlynkexamplesDocument16 paginiBlynkexamplesUYeMin HtikeÎncă nu există evaluări
- 2 Axis Gimbal Brushless With l298nDocument9 pagini2 Axis Gimbal Brushless With l298nMano OhanianÎncă nu există evaluări
- Sketch Oct19aDocument2 paginiSketch Oct19aChandika AnnasiwattaÎncă nu există evaluări
- Programacion para Robot ZumoDocument3 paginiProgramacion para Robot Zumoandres angel salinasÎncă nu există evaluări
- PwmserviceDocument8 paginiPwmserviceapi-438120791Încă nu există evaluări
- Mini Project RtsDocument11 paginiMini Project RtsOng Xuan YaoÎncă nu există evaluări
- Xsim Simulator Sends Game Data to MotorsDocument10 paginiXsim Simulator Sends Game Data to MotorsperrociegoÎncă nu există evaluări
- Controlling NEMA-17 Stepper Motor Speed With Trimpot Without Using DelayDocument2 paginiControlling NEMA-17 Stepper Motor Speed With Trimpot Without Using DelaySandeep KumarÎncă nu există evaluări
- VHDL Suma Con CarryDocument15 paginiVHDL Suma Con CarryNatalia MoralezÎncă nu există evaluări
- #Include #Include: "Spi.H" "Digitalio.H"Document6 pagini#Include #Include: "Spi.H" "Digitalio.H"api-552271981Încă nu există evaluări
- Control Sumo Esp8266Document5 paginiControl Sumo Esp8266Paulo Gaston Villalba (Ctrl c)Încă nu există evaluări
- Obd2 Simulator - InoDocument4 paginiObd2 Simulator - InoabdÎncă nu există evaluări
- Arduino Control Car V2Document4 paginiArduino Control Car V2Mikaela E Ramírez HerreraÎncă nu există evaluări
- ProjectcodeDocument3 paginiProjectcodeRahul YadavÎncă nu există evaluări
- Initgpio: Void VoidDocument12 paginiInitgpio: Void Voidapi-397509789Încă nu există evaluări
- Arduino Uno Car Code Control via Blynk AppDocument5 paginiArduino Uno Car Code Control via Blynk AppBryan HernandezÎncă nu există evaluări
- TP DSPDocument16 paginiTP DSPikram mbrÎncă nu există evaluări
- MotorencodersDocument9 paginiMotorencodersapi-398062839100% (1)
- CodigoDocument5 paginiCodigopepe pecasÎncă nu există evaluări
- isd_code4Document5 paginiisd_code4Khushi AgrawalÎncă nu există evaluări
- Main CDocument28 paginiMain Cindramora2003Încă nu există evaluări
- AnexeDocument5 paginiAnexemohamedÎncă nu există evaluări
- OrgcmdDocument13 paginiOrgcmdMuhammad Jalal AldeenÎncă nu există evaluări
- SpihsmDocument26 paginiSpihsmapi-438120791Încă nu există evaluări
- ROBOTICS Lab ManualDocument7 paginiROBOTICS Lab Manualparidhi kaushikÎncă nu există evaluări
- EMG EKG Code For ARDUINO SHIELDDocument4 paginiEMG EKG Code For ARDUINO SHIELDbeniamin Alexandru100% (1)
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkDe la EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkÎncă nu există evaluări
- Measures of Central TendencyDocument14 paginiMeasures of Central TendencyAnonymous 3yqNzCxtTzÎncă nu există evaluări
- Kaizen CostingDocument4 paginiKaizen CostingAnonymous 3yqNzCxtTzÎncă nu există evaluări
- DispersionDocument8 paginiDispersionAnonymous 3yqNzCxtTzÎncă nu există evaluări
- Cost Control MeaningDocument26 paginiCost Control MeaningAnonymous 3yqNzCxtTzÎncă nu există evaluări
- 2 FunctionsDocument7 pagini2 FunctionsAnonymous 3yqNzCxtTzÎncă nu există evaluări
- Operations Research 2 Mid Online BitsDocument12 paginiOperations Research 2 Mid Online BitstslnarayanaÎncă nu există evaluări
- AdvertisingDocument5 paginiAdvertisingAnonymous 3yqNzCxtTzÎncă nu există evaluări
- Operations Research - An IntroductionDocument14 paginiOperations Research - An IntroductionMahesh KumarÎncă nu există evaluări
- 2.accounting PrinciplesDocument4 pagini2.accounting PrinciplesAnonymous 3yqNzCxtTzÎncă nu există evaluări
- IfimmDocument15 paginiIfimmBikash BhuniaÎncă nu există evaluări
- Self Balancing LedgersDocument10 paginiSelf Balancing LedgersAnonymous 3yqNzCxtTzÎncă nu există evaluări
- Social Responsibilities of BusinessDocument4 paginiSocial Responsibilities of BusinessAnonymous 3yqNzCxtTzÎncă nu există evaluări
- SegmentreportingworkshopDocument28 paginiSegmentreportingworkshopAdelyn CasinilloÎncă nu există evaluări
- CA Final Costing (New Syllabus) - Fast Track Notes by CA Purushottam Aggarwal PDFDocument133 paginiCA Final Costing (New Syllabus) - Fast Track Notes by CA Purushottam Aggarwal PDFKarthik VadlamudiÎncă nu există evaluări
- How to Categorize the Shortcut Keys in Tally.ERP 9Document21 paginiHow to Categorize the Shortcut Keys in Tally.ERP 9Anonymous 3yqNzCxtTzÎncă nu există evaluări
- M Acc Key 2020Document7 paginiM Acc Key 2020Anonymous 3yqNzCxtTzÎncă nu există evaluări
- Pricing Decisions PDFDocument4 paginiPricing Decisions PDFAnonymous 3yqNzCxtTzÎncă nu există evaluări
- Ch10 ShortTermDMDocument19 paginiCh10 ShortTermDMZenÎncă nu există evaluări
- Wild, Shaw, and Chiappetta Fifth EditionDocument41 paginiWild, Shaw, and Chiappetta Fifth EditionAnonymous 3yqNzCxtTzÎncă nu există evaluări
- Tally ERP 2017-18 - Basic LevelDocument44 paginiTally ERP 2017-18 - Basic LevelAnonymous 3yqNzCxtTzÎncă nu există evaluări
- Pricing Decisions PDFDocument4 paginiPricing Decisions PDFAnonymous 3yqNzCxtTzÎncă nu există evaluări
- DR Rachna Mahalwala - B.Com III Year Management AccountingDocument5 paginiDR Rachna Mahalwala - B.Com III Year Management AccountingAnonymous 3yqNzCxtTzÎncă nu există evaluări
- 07 Chapter-2Document33 pagini07 Chapter-2Anonymous 3yqNzCxtTzÎncă nu există evaluări
- ASDocument24 paginiASAnonymous 3yqNzCxtTzÎncă nu există evaluări
- Answer: B: Page 1/12Document12 paginiAnswer: B: Page 1/12AakashÎncă nu există evaluări
- Falcon 200DX FLT CTLS STABDocument7 paginiFalcon 200DX FLT CTLS STABtayo_bÎncă nu există evaluări
- Batch 1 - 10320 Items - ConsolDocument642 paginiBatch 1 - 10320 Items - ConsolRiyandi Achmad SyabanaÎncă nu există evaluări
- Exam 004Document4 paginiExam 004Harun AlrasidÎncă nu există evaluări
- Ata 27 FCS System OverviewDocument8 paginiAta 27 FCS System Overviewbnolasco0% (1)
- Flight Control SystemDocument15 paginiFlight Control SystemArcer 97100% (1)
- Tuning GuideDocument11 paginiTuning GuidePham LongÎncă nu există evaluări
- 753 771-Piper Pitch Trim Service Manual-Rev 19810918Document206 pagini753 771-Piper Pitch Trim Service Manual-Rev 19810918Polo Soto100% (1)
- Flight Control System (ATA 27) : SCHOOL YEAR 2023-2024Document60 paginiFlight Control System (ATA 27) : SCHOOL YEAR 2023-2024Ruskee PatawaranÎncă nu există evaluări
- 09 - Flight ControlsDocument11 pagini09 - Flight ControlsJoão BernardisÎncă nu există evaluări
- The Four Fundamentals Effect and Use of The Flight Controls: (Figure 3-2) The Following Is Always True, Regardless of TheDocument2 paginiThe Four Fundamentals Effect and Use of The Flight Controls: (Figure 3-2) The Following Is Always True, Regardless of TheyayaÎncă nu există evaluări
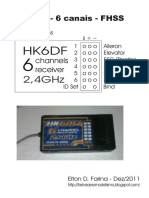
- 6 Channel 2.4GHz Receiver Pinout GuideDocument1 pagină6 Channel 2.4GHz Receiver Pinout GuidePool MamaniÎncă nu există evaluări
- A320 Hyd PDFDocument1 paginăA320 Hyd PDFkpil100% (1)
- Bombardier Learjet-Flight Control Systems and AvionicsDocument88 paginiBombardier Learjet-Flight Control Systems and AvionicsJacob Jack Yosha100% (3)
- Metodo de Ziegler-NicholsDocument3 paginiMetodo de Ziegler-Nicholsjuan daniel camas cruzÎncă nu există evaluări
- Ata 27 DC9Document15 paginiAta 27 DC9SantiagoZapataÎncă nu există evaluări
- Flight ControlsDocument41 paginiFlight ControlsMichel Garandán PizzornoÎncă nu există evaluări
- Primary Controls: Instrument Panel Cessna 182Document2 paginiPrimary Controls: Instrument Panel Cessna 182Maan MirallesÎncă nu există evaluări
- Bae 146 Technical Training Manual Mechanical & Avionics Course - B1+B2 (LVL 2&3) Flight Controls General Ata 27Document17 paginiBae 146 Technical Training Manual Mechanical & Avionics Course - B1+B2 (LVL 2&3) Flight Controls General Ata 27stiveÎncă nu există evaluări
- Preflight ChecklistDocument1 paginăPreflight ChecklistallrcflightÎncă nu există evaluări
- User Manual Elro TE108 (English - 2 Pages)Document2 paginiUser Manual Elro TE108 (English - 2 Pages)Az SymÎncă nu există evaluări
- JRP2930 Manual PDFDocument107 paginiJRP2930 Manual PDFSCÎncă nu există evaluări
- A319 - A321 - LAA - and - LUS - A321NX - (Trouble Shooting Manual) - (FALTCHAP-27)Document82 paginiA319 - A321 - LAA - and - LUS - A321NX - (Trouble Shooting Manual) - (FALTCHAP-27)A WongÎncă nu există evaluări
- Primary Flight Control SurfacesDocument7 paginiPrimary Flight Control SurfacesVignesh DuraiÎncă nu există evaluări