S-ar putea să vă placă și
- Process AciérieDocument6 paginiProcess Aciériesanae jaouiÎncă nu există evaluări
- Exam18 19Document2 paginiExam18 19Naïm AbdelkerimÎncă nu există evaluări
- TP 3 - C++Document1 paginăTP 3 - C++Ly NaÎncă nu există evaluări
- 3 Partie Caractéristiques Des LubrifiantDocument32 pagini3 Partie Caractéristiques Des Lubrifiantsamir belamriÎncă nu există evaluări
- Prise en Main de Microsoft Office Excel 2016Document713 paginiPrise en Main de Microsoft Office Excel 2016max80% (5)
- POO2019 Cour2 PDFDocument31 paginiPOO2019 Cour2 PDFHamada KhorsiÎncă nu există evaluări
- Chapitre2 IA 2019Document53 paginiChapitre2 IA 2019Khalil KraiemÎncă nu există evaluări
- 9 PDFDocument34 pagini9 PDFons laadharÎncă nu există evaluări
- TP2 Interpolation-Approximation Correction - 1Document11 paginiTP2 Interpolation-Approximation Correction - 1Eya Saidi100% (1)
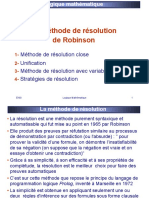
- Principe de Resolution de Robinson-CH4Document71 paginiPrincipe de Resolution de Robinson-CH4youssef ghaouiÎncă nu există evaluări
- Correction Examen TLC Janvier 2014 PDFDocument3 paginiCorrection Examen TLC Janvier 2014 PDFsyadav_399075Încă nu există evaluări
- TrameDocument3 paginiTrameassembleur7777Încă nu există evaluări
- 2LR SEM2 SERIE05 Protocoles InternetDocument8 pagini2LR SEM2 SERIE05 Protocoles InternetEiriedÎncă nu există evaluări
- Osi PDFDocument6 paginiOsi PDFassembleur7777Încă nu există evaluări
- Examen de Compilation (Normal) 2016-2017Document1 paginăExamen de Compilation (Normal) 2016-2017Machkour LailaÎncă nu există evaluări
- Cours 7 Routage StatiqueDocument46 paginiCours 7 Routage StatiqueKahina AMARAÎncă nu există evaluări
- SynchronisationDocument21 paginiSynchronisationChaima ZeroualÎncă nu există evaluări
- TD AdressageIP PDFDocument5 paginiTD AdressageIP PDFabdeali benassalÎncă nu există evaluări
- Question de Cours Reseaux 2Document4 paginiQuestion de Cours Reseaux 2Eslemhoum MedlÎncă nu există evaluări
- Les Objets Prédéfinis en JavaScriptDocument3 paginiLes Objets Prédéfinis en JavaScriptBen Aissa MohamedÎncă nu există evaluări
- TD1. Arbre CouvrantDocument2 paginiTD1. Arbre Couvrantsafe selmi100% (1)
- Vues SQL OracleDocument27 paginiVues SQL Oraclesanaa100% (1)
- Examen Algo Et Complexité 2021 CorrectionvfDocument7 paginiExamen Algo Et Complexité 2021 Correctionvfsafe selmiÎncă nu există evaluări
- 2014 05 Examen Compilation CorrectionDocument4 pagini2014 05 Examen Compilation CorrectionChouichi Ghada100% (1)
- TD 1 JavaDocument3 paginiTD 1 JavaCurriculum Vitae100% (1)
- Le Modèle ODMG. ODL, OQL, OML Khalid Nafil 05 - 28 - 2009 ODMG 1Document57 paginiLe Modèle ODMG. ODL, OQL, OML Khalid Nafil 05 - 28 - 2009 ODMG 1Hakem TahaÎncă nu există evaluări
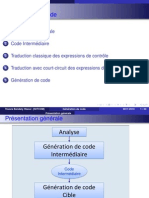
- Compilation 2Document20 paginiCompilation 2BouimizarÎncă nu există evaluări
- Serie TD MahseurDocument12 paginiSerie TD MahseurSelma RahimÎncă nu există evaluări
- TD TCP R&SDocument3 paginiTD TCP R&SibrahimÎncă nu există evaluări
- Chapitre3-Modele RelationnelDocument17 paginiChapitre3-Modele Relationnelmikao31Încă nu există evaluări
- Cours UMLDocument33 paginiCours UMLdeogratias davoÎncă nu există evaluări
- TD3 Transactions 2017-2018Document2 paginiTD3 Transactions 2017-2018dhaouadi hazemÎncă nu există evaluări
- Examen ProbaDocument2 paginiExamen ProbaHassan HamiÎncă nu există evaluări
- td1 CorrigéDocument3 paginitd1 CorrigéNahrawess SlamaÎncă nu există evaluări
- Corrige GL 2021Document2 paginiCorrige GL 2021PapiÎncă nu există evaluări
- Série TD 1 GL Octobre 2021Document2 paginiSérie TD 1 GL Octobre 2021Rym Là PoupéeÎncă nu există evaluări
- Le Langage Java RMIDocument18 paginiLe Langage Java RMIMohamed Elyousfi II100% (1)
- Ali EL Brikik ProbabiliteìDocument102 paginiAli EL Brikik ProbabiliteìIliasse ABDELLAOUIÎncă nu există evaluări
- Elements de Reponse Cas Principal 2020Document9 paginiElements de Reponse Cas Principal 2020empsy chosiÎncă nu există evaluări
- Cours 1 - IntroductionDocument37 paginiCours 1 - IntroductionMouhamed Rassoul GueyeÎncă nu există evaluări
- TD Normalisation 1 2Document4 paginiTD Normalisation 1 2Abdallah HammamiÎncă nu există evaluări
- Examen SarDocument4 paginiExamen SarAMANI BOUSSAAÎncă nu există evaluări
- 1 PARTIE: COURS (Sans Document)Document11 pagini1 PARTIE: COURS (Sans Document)Samuel MouafoÎncă nu există evaluări
- Correction TD: Diagramme de ClassesDocument4 paginiCorrection TD: Diagramme de ClassesJess BensÎncă nu există evaluări
- Ia TDDocument22 paginiIa TDhiba chaherÎncă nu există evaluări
- Chapitre2-Cycle, Cocycle, Arbre Et ArborescenceDocument10 paginiChapitre2-Cycle, Cocycle, Arbre Et ArborescenceIssam08Încă nu există evaluări
- Masterpro Final 2005 CorrectionDocument4 paginiMasterpro Final 2005 CorrectionChayma Ben ZekriÎncă nu există evaluări
- M.inter Analyse PDFDocument7 paginiM.inter Analyse PDFAli SalahÎncă nu există evaluări
- Td2 Corrige 2Document8 paginiTd2 Corrige 2mastere ticÎncă nu există evaluări
- Thèse Complète ElongDocument120 paginiThèse Complète ElongNihad HaÎncă nu există evaluări
- THL Rattrapage 2017-18Document1 paginăTHL Rattrapage 2017-18Emna KanzariÎncă nu există evaluări
- Chapitre3 Classe Objet JavaDocument38 paginiChapitre3 Classe Objet JavaColmain NassiriÎncă nu există evaluări
- TD3 Big DataDocument2 paginiTD3 Big DataMohamed Sidi BrahimÎncă nu există evaluări
- EMD SE 2021 SolutionDocument4 paginiEMD SE 2021 SolutionfatimaÎncă nu există evaluări
- Examen 1 Assembleur 2011 PDFDocument2 paginiExamen 1 Assembleur 2011 PDFNina AbÎncă nu există evaluări
- Theorie GraphesDocument103 paginiTheorie Graphessouar hamidÎncă nu există evaluări
- TD UML - Diagramme de Classes PDFDocument2 paginiTD UML - Diagramme de Classes PDFBoubs SelkaÎncă nu există evaluări
- Java LambdaDocument28 paginiJava LambdaSofiane SHÎncă nu există evaluări
- Chapitre 7Document23 paginiChapitre 7infcomÎncă nu există evaluări
- Formation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesDe la EverandFormation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesÎncă nu există evaluări
- Apprendre et enseigner sur le Web: quelle ingénierie pédagogique?De la EverandApprendre et enseigner sur le Web: quelle ingénierie pédagogique?Încă nu există evaluări
- TD17 Serie 3Document2 paginiTD17 Serie 3tarikjary1976Încă nu există evaluări
- Chapitre III Analyse Fréquentielle Des Signaux Et Systèmes: Groupe Pédagogique Traitement Du Signal IsecsDocument25 paginiChapitre III Analyse Fréquentielle Des Signaux Et Systèmes: Groupe Pédagogique Traitement Du Signal Isecsons laadharÎncă nu există evaluări
- 10 PDFDocument9 pagini10 PDFons laadharÎncă nu există evaluări
- Chapitre III Analyse Fréquentielle Des Signaux Et Systèmes: Groupe Pédagogique Traitement Du Signal IsecsDocument25 paginiChapitre III Analyse Fréquentielle Des Signaux Et Systèmes: Groupe Pédagogique Traitement Du Signal Isecsons laadharÎncă nu există evaluări
- Chapitre III Analyse Fréquentielle Des Signaux Et Systèmes: Groupe Pédagogique Traitement Du Signal IsecsDocument25 paginiChapitre III Analyse Fréquentielle Des Signaux Et Systèmes: Groupe Pédagogique Traitement Du Signal Isecsons laadharÎncă nu există evaluări
- Jadwal Genap 2223-2Document2 paginiJadwal Genap 2223-2nowo benyÎncă nu există evaluări
- Marry Your Daughter Sheet - 1Document2 paginiMarry Your Daughter Sheet - 1Nurendung ZuliantoÎncă nu există evaluări
- ExcisionDocument54 paginiExcisionAbdou Razak OuédraogoÎncă nu există evaluări
- Observons:: Nature Du Complément Circonstanciel de TempsDocument2 paginiObservons:: Nature Du Complément Circonstanciel de TempsMehdi YMÎncă nu există evaluări
- Cahier D Exercices Ile Aux Mots 8hDocument88 paginiCahier D Exercices Ile Aux Mots 8hCizÎncă nu există evaluări
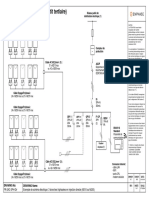
- 3 Branches Triphasées en Injection Directe M215 Ou M250Document1 pagină3 Branches Triphasées en Injection Directe M215 Ou M250MbgardÎncă nu există evaluări
- TFE Gustave KISHATU MWAMBA Version Finale-1Document112 paginiTFE Gustave KISHATU MWAMBA Version Finale-1gustave kishatu100% (2)
- Tube VentouriDocument10 paginiTube VentouriMohammed BoulbairÎncă nu există evaluări
- Chapitre 1 LES OUTILS MATHEMATIQUESDocument9 paginiChapitre 1 LES OUTILS MATHEMATIQUESa.ddÎncă nu există evaluări
- Introduction À La RobotiqueDocument19 paginiIntroduction À La RobotiqueRazzougui SarahÎncă nu există evaluări
- Mesure de Compression Moteur Vers FinaleDocument46 paginiMesure de Compression Moteur Vers FinaleRaouf HarzallahÎncă nu există evaluări
- Af Sen GaeDocument42 paginiAf Sen GaeعبداللهبنزنوÎncă nu există evaluări
- Controle Et Suivi Chantier RoutierhjhDocument14 paginiControle Et Suivi Chantier Routierhjhعثمان البريشيÎncă nu există evaluări
- Exercice D'application Optique VDocument1 paginăExercice D'application Optique VARDALAn MohamedÎncă nu există evaluări
- Depliant ELM MasterDocument3 paginiDepliant ELM MasterYazid AbouchihabeddineÎncă nu există evaluări
- RSE & EthiqueDocument6 paginiRSE & Ethiquealemor2369Încă nu există evaluări
- Les Étapes de Formation Des Roches SédimentaireDocument2 paginiLes Étapes de Formation Des Roches Sédimentairehamada2002100% (1)
- Caplp Externe Genie Electrique Electrotechnique Et Energie Epreuve 1 Doc RessourcesDocument28 paginiCaplp Externe Genie Electrique Electrotechnique Et Energie Epreuve 1 Doc RessourcesOus SàmàÎncă nu există evaluări
- AnnexeDocument168 paginiAnnexeMoez AliÎncă nu există evaluări
- Arval - Cofrastra 40Document16 paginiArval - Cofrastra 40helder.fradeÎncă nu există evaluări
- Exam. F.CDocument2 paginiExam. F.CmidsmasherÎncă nu există evaluări
- ALIZE LCPC MU v1.5 FR PDFDocument116 paginiALIZE LCPC MU v1.5 FR PDFSoumana Abdou100% (1)
- Racines Carrees BaseDocument8 paginiRacines Carrees Basejulien9562Încă nu există evaluări
- TP2Document4 paginiTP2Youssef Don RajawiÎncă nu există evaluări
- Exposé MDE Et Énergie RenouvelablesDocument12 paginiExposé MDE Et Énergie Renouvelablesromain fokamÎncă nu există evaluări
- 2nd - Exercices Corrigés - Variations D'une FonctDocument1 pagină2nd - Exercices Corrigés - Variations D'une Fonctalyahmed610Încă nu există evaluări
- Analyse D'une Situation de Communication en TaDocument2 paginiAnalyse D'une Situation de Communication en Taroger martin bassong batiigÎncă nu există evaluări