S-ar putea să vă placă și
- Foundations of Modular Programming - Ia-Rm001 - En-PDocument86 paginiFoundations of Modular Programming - Ia-Rm001 - En-PLuis Miguel Rios CuentasÎncă nu există evaluări
- Niagara Workbench Guide-LITEDocument63 paginiNiagara Workbench Guide-LITEAbsolute Media HydÎncă nu există evaluări
- Autosar SWS DCMDocument265 paginiAutosar SWS DCMAnubhav Jain100% (1)
- AUTOSAR SWS DiagnosticCommunicationManager PDFDocument553 paginiAUTOSAR SWS DiagnosticCommunicationManager PDFyuvarajnarayanasamyÎncă nu există evaluări
- 20.022 (WinLase LAN User Guide)Document368 pagini20.022 (WinLase LAN User Guide)ArtifactureÎncă nu există evaluări
- Nso 6Document30 paginiNso 6cool dude911Încă nu există evaluări
- Linux Internals & Networking: System Programming Using Kernel InterfacesDocument305 paginiLinux Internals & Networking: System Programming Using Kernel InterfacesSiddharth SidhuÎncă nu există evaluări
- Xilinx Drivers GuideDocument12 paginiXilinx Drivers Guideecl_man100% (1)
- Software Defined Networking (SDN) Overview (High Level ViewDocument15 paginiSoftware Defined Networking (SDN) Overview (High Level ViewSherl HolmÎncă nu există evaluări
- Linux DDDocument2 paginiLinux DDVeni GuptaÎncă nu există evaluări
- AUTOSAR LayeredSoftwareArchitectureDocument46 paginiAUTOSAR LayeredSoftwareArchitectureGiridharÎncă nu există evaluări
- MM 11Document41 paginiMM 11Amresh KumarÎncă nu există evaluări
- Connection Framework Ref ManualDocument145 paginiConnection Framework Ref ManualSwaroopÎncă nu există evaluări
- L - A Common Lisp For Embedded SystemsDocument7 paginiL - A Common Lisp For Embedded Systemsjblair33Încă nu există evaluări
- VMW Ten Reasons To Choose Vmware NSX To Automate Networking and SecurityDocument1 paginăVMW Ten Reasons To Choose Vmware NSX To Automate Networking and SecuritySarah AliÎncă nu există evaluări
- Debugger For Power PC ProcessorsDocument6 paginiDebugger For Power PC Processorsi_luxiÎncă nu există evaluări
- Sdn/Nfv - Trends And Standards: 신명기, Etri 2014.6.24 Krnet2014Document30 paginiSdn/Nfv - Trends And Standards: 신명기, Etri 2014.6.24 Krnet2014Anonymous SmYjg7gÎncă nu există evaluări
- Network Devices & Basic Configuration ChapterDocument20 paginiNetwork Devices & Basic Configuration ChapterAmare EyayuÎncă nu există evaluări
- Fuji Inverter ManuDocument116 paginiFuji Inverter ManuBrahim CherguiÎncă nu există evaluări
- CETPA-Adv. Embedded System TrainingDocument2 paginiCETPA-Adv. Embedded System TrainingNitinÎncă nu există evaluări
- Micom p14dbDocument40 paginiMicom p14dbABDERRAHMANE JAFÎncă nu există evaluări
- Computer Organization and ArchitecturesDocument6 paginiComputer Organization and ArchitecturesKuldeep Sai KancharlaÎncă nu există evaluări
- Computer Organization and ArchitecturesDocument6 paginiComputer Organization and ArchitecturesKuldeep Sai KancharlaÎncă nu există evaluări
- Async Fifo PDFDocument12 paginiAsync Fifo PDFMukund ShahÎncă nu există evaluări
- Instruction Format PDFDocument5 paginiInstruction Format PDFG.SAIDULUÎncă nu există evaluări
- Automotive Embedded System Development in AUTOSARDocument18 paginiAutomotive Embedded System Development in AUTOSARkumdh100% (3)
- System Design Using So PC BuilderDocument14 paginiSystem Design Using So PC BuilderNgọc Hải NguyễnÎncă nu există evaluări
- Introduction Part 2 - Lec 1Document58 paginiIntroduction Part 2 - Lec 1Danu NimÎncă nu există evaluări
- Datasheet Ecu TestDocument2 paginiDatasheet Ecu Testsa ltyÎncă nu există evaluări
- Z OS ISPF Day 1Document31 paginiZ OS ISPF Day 1NagfaceÎncă nu există evaluări
- CH03-COA10e ComputerFunctionDocument20 paginiCH03-COA10e ComputerFunctionthuan phamÎncă nu există evaluări
- Linux Driver Development NotesDocument55 paginiLinux Driver Development NoteshilgadÎncă nu există evaluări
- Principles of System Software: Aditya Roy KarmakarDocument11 paginiPrinciples of System Software: Aditya Roy KarmakarAditya Roy karmakarÎncă nu există evaluări
- Reference To An Entity That Precedes Its Definition in The Program Is Called Forward Reference.) Handling The Forward Reference in ADocument4 paginiReference To An Entity That Precedes Its Definition in The Program Is Called Forward Reference.) Handling The Forward Reference in Asolo 2002Încă nu există evaluări
- Tf13 Factorytalk System Design Considerations RstechedDocument101 paginiTf13 Factorytalk System Design Considerations RstechedBeto De HermosilloÎncă nu există evaluări
- MODULE 2: Assembly Programming and Instruction of 8051Document16 paginiMODULE 2: Assembly Programming and Instruction of 8051SrinivasÎncă nu există evaluări
- 99-Comware v3 Command Manual PDFDocument2.546 pagini99-Comware v3 Command Manual PDFlslowÎncă nu există evaluări
- Soft Core Processor MicroarchitectureDocument18 paginiSoft Core Processor MicroarchitectureavinashdaraÎncă nu există evaluări
- ASR1k 102 Software ArchitectureDocument38 paginiASR1k 102 Software ArchitectureSaptarshi BhattacharjeeÎncă nu există evaluări
- Linux Wifi Developer GuideDocument287 paginiLinux Wifi Developer GuideKuldeep Kushwaha100% (6)
- 20201221-Complete Notes MCADocument96 pagini20201221-Complete Notes MCADanish UllahÎncă nu există evaluări
- Source Code Libraries: RSL: Sample Implementation (Iec 101 / 104)Document4 paginiSource Code Libraries: RSL: Sample Implementation (Iec 101 / 104)birinderÎncă nu există evaluări
- I.mx Linux Reference ManualDocument289 paginiI.mx Linux Reference Manualyhuke2265Încă nu există evaluări
- BRKSPG 3616Document72 paginiBRKSPG 3616cool dude911Încă nu există evaluări
- SDN Overview: Software Defined Networking ExplainedDocument28 paginiSDN Overview: Software Defined Networking Explainedbala_thegameÎncă nu există evaluări
- Firmware Unit IVDocument42 paginiFirmware Unit IVRaviÎncă nu există evaluări
- 11B Series CNC Controller Offers Integrated Servo Axes and Easy OperationDocument11 pagini11B Series CNC Controller Offers Integrated Servo Axes and Easy OperationTa Thanh TuanÎncă nu există evaluări
- Sca CRCDocument46 paginiSca CRCprasobhÎncă nu există evaluări
- Ideas On A DCS ArchitectureDocument6 paginiIdeas On A DCS ArchitectureajayvgÎncă nu există evaluări
- Core Components of Embedded SystemsDocument12 paginiCore Components of Embedded SystemsPrathameshÎncă nu există evaluări
- Lecture 2 - Typical Embedded SystemDocument5 paginiLecture 2 - Typical Embedded SystemrhodonelduatinÎncă nu există evaluări
- Fuji Micrex SXDocument73 paginiFuji Micrex SXRetno WulandariÎncă nu există evaluări
- Omnipcx 4400Document82 paginiOmnipcx 4400Odair RibeiroÎncă nu există evaluări
- ZCC Group - Embedded Mbedded System Research & Development Evelopment LabDocument1 paginăZCC Group - Embedded Mbedded System Research & Development Evelopment LabA2IT Pvt. Ltd.Încă nu există evaluări
- UFR Series NFC Reader APIDocument426 paginiUFR Series NFC Reader APIHasan TagievÎncă nu există evaluări
- Rexroth Indralogic The Latest Generation of Open PLC SolutionsDocument8 paginiRexroth Indralogic The Latest Generation of Open PLC SolutionsOARIASCOÎncă nu există evaluări
- Unit 1: 1.1 Microprocessors and MicrocontrollersDocument13 paginiUnit 1: 1.1 Microprocessors and Microcontrollerssachin tupeÎncă nu există evaluări
- 2 Programmer View of Computer and Instruction CycleDocument45 pagini2 Programmer View of Computer and Instruction Cycleemansheraz7Încă nu există evaluări
- Next-Generation switching OS configuration and management: Troubleshooting NX-OS in Enterprise EnvironmentsDe la EverandNext-Generation switching OS configuration and management: Troubleshooting NX-OS in Enterprise EnvironmentsÎncă nu există evaluări
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.De la EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Încă nu există evaluări
- "Unleashing the Power of Assembly Language: Mastering the World's Most Efficient Code"De la Everand"Unleashing the Power of Assembly Language: Mastering the World's Most Efficient Code"Încă nu există evaluări
- Lesson 2 - Plant LifeDocument21 paginiLesson 2 - Plant LifeyuvarajnarayanasamyÎncă nu există evaluări
- Lesson 1 - Living and Non-LivingDocument10 paginiLesson 1 - Living and Non-LivingyuvarajnarayanasamyÎncă nu există evaluări
- What Is Can BusDocument2 paginiWhat Is Can Busvdevarajsaran100% (1)
- Memory Allocations in C PDFDocument2 paginiMemory Allocations in C PDFyuvarajnarayanasamyÎncă nu există evaluări
- msp430fr2311 Datasheet PDFDocument94 paginimsp430fr2311 Datasheet PDFyuvarajnarayanasamyÎncă nu există evaluări
- B122LnotesBV PDFDocument37 paginiB122LnotesBV PDFryanÎncă nu există evaluări
- MSP430FR2311 Launchpad User Guide PDFDocument35 paginiMSP430FR2311 Launchpad User Guide PDFyuvarajnarayanasamyÎncă nu există evaluări
- English 101 - 3Document12 paginiEnglish 101 - 3Akundi VsjÎncă nu există evaluări
- CC3x20 Labs PDFDocument29 paginiCC3x20 Labs PDFyuvarajnarayanasamyÎncă nu există evaluări
- MSP430FR2XX Family User Guide PDFDocument661 paginiMSP430FR2XX Family User Guide PDFyuvarajnarayanasamyÎncă nu există evaluări
- Programming Skills PDFDocument6 paginiProgramming Skills PDFyuvarajnarayanasamyÎncă nu există evaluări
- Topic 5-Embedded C BasicsDocument35 paginiTopic 5-Embedded C BasicsVarunSunilÎncă nu există evaluări
- 20.2 Nested Header FilesDocument3 pagini20.2 Nested Header FilesyuvarajnarayanasamyÎncă nu există evaluări
- C Interview Questions and Answers123 PDFDocument49 paginiC Interview Questions and Answers123 PDFBalakrishnaÎncă nu există evaluări
- User's Guide: Tiva™ TM4C129X Development BoardDocument41 paginiUser's Guide: Tiva™ TM4C129X Development BoardyuvarajnarayanasamyÎncă nu există evaluări
- tm4c1294ncpdt PDFDocument1.890 paginitm4c1294ncpdt PDFEmmanuel Alvarez TeloxaÎncă nu există evaluări
- Rpi 3b v1 2 Schematic ReducedDocument1 paginăRpi 3b v1 2 Schematic ReducedZeirus100% (1)
- lpc1763 lpc1764 lpc1765 lpc1766 lpc1767 lpc1768 lpc1769Document79 paginilpc1763 lpc1764 lpc1765 lpc1766 lpc1767 lpc1768 lpc1769Tiago Coelho PereiraÎncă nu există evaluări
- 30A BLDC ESC Product Manual PDFDocument9 pagini30A BLDC ESC Product Manual PDFPePe Eduardo Mendoza EstradaÎncă nu există evaluări
- USB Drivers: Ted Baker Andy Wang COP 5641 / CIS 4930Document87 paginiUSB Drivers: Ted Baker Andy Wang COP 5641 / CIS 4930AArdianDigicompÎncă nu există evaluări
- Vcast Interactive Tutorials PDFDocument365 paginiVcast Interactive Tutorials PDFyuvarajnarayanasamyÎncă nu există evaluări
- I2C - Learn - SparkfunDocument6 paginiI2C - Learn - SparkfunyuvarajnarayanasamyÎncă nu există evaluări
- Autosar IntroDocument54 paginiAutosar IntroaravindÎncă nu există evaluări
- Clock, Stretching, Arbitration - I2C BusDocument2 paginiClock, Stretching, Arbitration - I2C BusyuvarajnarayanasamyÎncă nu există evaluări
- Autosar SWS Os PDFDocument247 paginiAutosar SWS Os PDFyuvarajnarayanasamyÎncă nu există evaluări
- Vcast Quick Start PDFDocument42 paginiVcast Quick Start PDFyuvarajnarayanasamyÎncă nu există evaluări
- AUTOSAR LayeredSoftwareArchitecture PDFDocument89 paginiAUTOSAR LayeredSoftwareArchitecture PDFyuvarajnarayanasamyÎncă nu există evaluări
- Document Title: Specification of Diagnostics Event ManagerDocument176 paginiDocument Title: Specification of Diagnostics Event ManageryuvarajnarayanasamyÎncă nu există evaluări
- SSD1960 Application Note v1.3Document32 paginiSSD1960 Application Note v1.3KrishÎncă nu există evaluări
- Switching Converters ExplainedDocument470 paginiSwitching Converters ExplainedAyushmaanÎncă nu există evaluări
- Service Guide SpecificationDocument30 paginiService Guide SpecificationLuiz Roberto Honório Alves FilhoÎncă nu există evaluări
- Digital Speed Control of DC Motor For Industrial Automation Using Pulse Width Modulation TechniqueDocument6 paginiDigital Speed Control of DC Motor For Industrial Automation Using Pulse Width Modulation TechniquevendiÎncă nu există evaluări
- DRV MV Air Cooled Catalog PDFDocument104 paginiDRV MV Air Cooled Catalog PDFLaurentiu Catalin100% (1)
- Uc3842 Monitor Power Supply Regulator IcDocument7 paginiUc3842 Monitor Power Supply Regulator IcJoseph Sidhom SnadaÎncă nu există evaluări
- Installation Manual Series PW 404: Electronic ModuleDocument7 paginiInstallation Manual Series PW 404: Electronic Modulemehdi810Încă nu există evaluări
- Manual Completo Sinovo SD600Document221 paginiManual Completo Sinovo SD600Felipe de PaulaÎncă nu există evaluări
- DatasheetDocument14 paginiDatasheetArmando JMÎncă nu există evaluări
- PRO-53 Categorized SoundbanksDocument4 paginiPRO-53 Categorized SoundbanksjohnnyÎncă nu există evaluări
- DC to AC Inverter GuideDocument33 paginiDC to AC Inverter Guideबृजभूषणशर्माÎncă nu există evaluări
- Guide Timer MSP430Document13 paginiGuide Timer MSP430Tatiana Leal del RíoÎncă nu există evaluări
- Accelerating Motor Control Design For Functional Safety PDFDocument11 paginiAccelerating Motor Control Design For Functional Safety PDFLuu TinhÎncă nu există evaluări
- IRAMS10UP60B: Series 10A, 600VDocument17 paginiIRAMS10UP60B: Series 10A, 600VAngel VelasquezÎncă nu există evaluări
- (Dos, Don'Ts, and Common Pitfalls) : Compactpci SystemsDocument4 pagini(Dos, Don'Ts, and Common Pitfalls) : Compactpci SystemsMadhavesh KulkarniÎncă nu există evaluări
- Self-Oscillating Buck Driver For Power LEDsDocument7 paginiSelf-Oscillating Buck Driver For Power LEDsr2salinasÎncă nu există evaluări
- LNK364PNDocument16 paginiLNK364PNウイレイヘル メロネÎncă nu există evaluări
- Bourgault X30 Set-Up For Version 3 - 18 - 517Document81 paginiBourgault X30 Set-Up For Version 3 - 18 - 517JasoÎncă nu există evaluări
- BLDC Motor Control Using Rapid Control Prototyping: Control Engineering and Applied Informatics March 2010Document8 paginiBLDC Motor Control Using Rapid Control Prototyping: Control Engineering and Applied Informatics March 2010Fahmi GbÎncă nu există evaluări
- Series H2 AC V/HZ and Open Vector Control: Installation & Operating ManualDocument143 paginiSeries H2 AC V/HZ and Open Vector Control: Installation & Operating ManualAnonymous AsIbqUÎncă nu există evaluări
- TPS40305Document37 paginiTPS40305gjsmoÎncă nu există evaluări
- 6.selective Harmonic Elimination of Multilevel Inverter Using SHEPWM TechniqueDocument4 pagini6.selective Harmonic Elimination of Multilevel Inverter Using SHEPWM Techniqueanji.guvvalaÎncă nu există evaluări
- A Novel High Power Factor PWM Rectifier Inverter For Electric Vehicle Charging StationDocument6 paginiA Novel High Power Factor PWM Rectifier Inverter For Electric Vehicle Charging StationAlap KareepadathÎncă nu există evaluări
- Arduino Pneumatic Flight SimulatorDocument11 paginiArduino Pneumatic Flight SimulatornelmindoÎncă nu există evaluări
- Innovative Smart Dustbin With An Android Applications Using IOTDocument5 paginiInnovative Smart Dustbin With An Android Applications Using IOTRaghavendra TalankiÎncă nu există evaluări
- EC Centrifugal Fan G1G133DE1902 ENGDocument5 paginiEC Centrifugal Fan G1G133DE1902 ENGWagesusilo23121986_Încă nu există evaluări
- FTM 1201Document28 paginiFTM 1201remelefeleÎncă nu există evaluări
- 50V/1.5A Step-Down High Brightness LED Driver: General Description FeaturesDocument11 pagini50V/1.5A Step-Down High Brightness LED Driver: General Description FeaturesKwun Hok ChongÎncă nu există evaluări
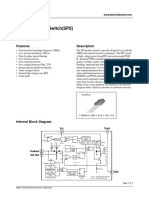
- Datasheet 5m0965Document14 paginiDatasheet 5m0965Carlos GoncalvezÎncă nu există evaluări
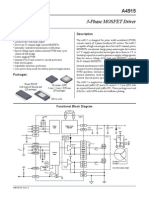
- 3-Phase MOSFET Driver: Description Features and BenefitsDocument17 pagini3-Phase MOSFET Driver: Description Features and BenefitsRyan DelaneyÎncă nu există evaluări