S-ar putea să vă placă și
- DSP Question Bank PDFDocument4 paginiDSP Question Bank PDFSarath KumarÎncă nu există evaluări
- Soft Computing AssignmentDocument13 paginiSoft Computing AssignmentAkshit Singla100% (1)
- Multirate Signal Processing 1.4Document45 paginiMultirate Signal Processing 1.4criharshaÎncă nu există evaluări
- AI AssignmentDocument5 paginiAI AssignmentRajeev SahaniÎncă nu există evaluări
- Soft Computing 2016Document4 paginiSoft Computing 2016Sandeep RoyÎncă nu există evaluări
- CS361 Soft Computing CSE Syllabus-Semesters - 5 PDFDocument3 paginiCS361 Soft Computing CSE Syllabus-Semesters - 5 PDFKATE WATSONÎncă nu există evaluări
- AE306 Digital Signal ProcessingDocument2 paginiAE306 Digital Signal ProcessingjaikeÎncă nu există evaluări
- AI-Lecture 12 - Simple PerceptronDocument24 paginiAI-Lecture 12 - Simple PerceptronMadiha Nasrullah100% (1)
- EC360 Soft Computing S5-EC-SyllabusDocument2 paginiEC360 Soft Computing S5-EC-SyllabusRensiÎncă nu există evaluări
- The Decision-Feedback Equalizer PDFDocument5 paginiThe Decision-Feedback Equalizer PDFHuy Nguyễn QuốcÎncă nu există evaluări
- DSP Question Paper April 2012Document2 paginiDSP Question Paper April 2012Famida Begam100% (1)
- Soft Computing Assignment-I: Greg Viot's Fuzzy Cruise Control System Using MatlabDocument7 paginiSoft Computing Assignment-I: Greg Viot's Fuzzy Cruise Control System Using MatlabSpk SudhinÎncă nu există evaluări
- DSP Book by NagoorkaniDocument11 paginiDSP Book by Nagoorkanigeetha657595Încă nu există evaluări
- Genetic - Algorithms - Traveling - Salesman - ProblemDocument15 paginiGenetic - Algorithms - Traveling - Salesman - ProblemSandeep RoyÎncă nu există evaluări
- Good Books of Digital Signal ProcessingDocument2 paginiGood Books of Digital Signal Processingchaitanya100% (1)
- DSP Question Paper Unit 4Document2 paginiDSP Question Paper Unit 4shankarÎncă nu există evaluări
- DSP Question Paper PDFDocument3 paginiDSP Question Paper PDFRaja PrabhuÎncă nu există evaluări
- Fuzzy Control: Lect 4 Fuzzy Logic ProcessDocument89 paginiFuzzy Control: Lect 4 Fuzzy Logic ProcessAjayÎncă nu există evaluări
- 1 Digital Signal Processing - IntroductionDocument19 pagini1 Digital Signal Processing - IntroductionArifiana Satya NastitiÎncă nu există evaluări
- M.tech. (Digital Systems & Signal Processing)Document41 paginiM.tech. (Digital Systems & Signal Processing)Ali MaaroufÎncă nu există evaluări
- EE8691 Embedded Systems NotesDocument76 paginiEE8691 Embedded Systems NotesMalik MubeenÎncă nu există evaluări
- EE407 Digital Signal ProcessingDocument2 paginiEE407 Digital Signal ProcessingbibuthomasÎncă nu există evaluări
- Menu - 634641189420527500 - CS5106 Soft Computing Lab AssignmentsDocument3 paginiMenu - 634641189420527500 - CS5106 Soft Computing Lab Assignmentsmohammad650% (1)
- Microcontrollers - UNIT IDocument45 paginiMicrocontrollers - UNIT IyayavaramÎncă nu există evaluări
- Data Structure Question BankDocument30 paginiData Structure Question BankamitukumarÎncă nu există evaluări
- Advanced Digital Signal Processing With Matlab (R)Document4 paginiAdvanced Digital Signal Processing With Matlab (R)srinivaskaredlaÎncă nu există evaluări
- Advanced Data Structures and AlgorithmsDocument7 paginiAdvanced Data Structures and AlgorithmsPrahitha MovvaÎncă nu există evaluări
- Lab # 07 IIR PDFDocument13 paginiLab # 07 IIR PDFIrfan HaiderÎncă nu există evaluări
- Digital Signal Processing R13 Previous PapersDocument5 paginiDigital Signal Processing R13 Previous PapersPrasannaKumar KaraNam100% (1)
- Filtering in The Frequency DomainDocument34 paginiFiltering in The Frequency DomainK.R.Raguram100% (1)
- CH 2 Raster Scan GraphicsDocument23 paginiCH 2 Raster Scan GraphicskanchangawndeÎncă nu există evaluări
- Course File OSDocument18 paginiCourse File OSMukesh KumarÎncă nu există evaluări
- Dip Assignment Questions Unit-1Document8 paginiDip Assignment Questions Unit-1OMSAINATH MPONLINEÎncă nu există evaluări
- 1 3Document59 pagini1 3Anteneh AtumoÎncă nu există evaluări
- Question Bank Module 1: An Overview of JavaDocument4 paginiQuestion Bank Module 1: An Overview of JavaVaishnavi SrinathÎncă nu există evaluări
- Project Assignment For Fuzzy LogicDocument23 paginiProject Assignment For Fuzzy LogicDan TavrovÎncă nu există evaluări
- ANN ProjectDocument38 paginiANN ProjectmaheshkundrapuÎncă nu există evaluări
- Ics2307 Simulation and ModellingDocument79 paginiIcs2307 Simulation and ModellingOloo PunditÎncă nu există evaluări
- Mamdani and SugenoDocument9 paginiMamdani and Sugenoanilshaw27Încă nu există evaluări
- Lecture-06 Fuzzy NumbersDocument3 paginiLecture-06 Fuzzy Numbersbkjr2008Încă nu există evaluări
- Principles of Digital Signal Processing - Lecture Notes, Study Material and Important Questions, AnswersDocument11 paginiPrinciples of Digital Signal Processing - Lecture Notes, Study Material and Important Questions, AnswersM.V. TV0% (1)
- Fuzzy Logic SeminarDocument22 paginiFuzzy Logic SeminarJatin BudhirajaÎncă nu există evaluări
- MATLAB ManualDocument17 paginiMATLAB Manualishan varshneyÎncă nu există evaluări
- MIMO OFDM Program ListDocument3 paginiMIMO OFDM Program ListSandip GajeraÎncă nu există evaluări
- Exercícios Extras (Em Inglês)Document51 paginiExercícios Extras (Em Inglês)Rayner AugustoÎncă nu există evaluări
- Digital Signal Processors Architectures Implementations and ApplicationsDocument17 paginiDigital Signal Processors Architectures Implementations and ApplicationsAbirami Kannan0% (3)
- RII & RIF FiltersDocument13 paginiRII & RIF FiltersMedab Abd El MalekÎncă nu există evaluări
- Feedback and Control Systems: Activity No. 2 - Time Response of Dynamic SystemsDocument15 paginiFeedback and Control Systems: Activity No. 2 - Time Response of Dynamic SystemsYvesExequielPascuaÎncă nu există evaluări
- Mechatronic Sensor and Actuator SystemsDocument1 paginăMechatronic Sensor and Actuator SystemscakarenesÎncă nu există evaluări
- Digital Signal Processing (ECEG-3171) : Course DescriptionDocument7 paginiDigital Signal Processing (ECEG-3171) : Course DescriptionDANIEL ABERAÎncă nu există evaluări
- Digital Signal Processing AssignmentDocument5 paginiDigital Signal Processing AssignmentM Faizan FarooqÎncă nu există evaluări
- Antennas and Wave PropagationDocument107 paginiAntennas and Wave PropagationvivekanandaÎncă nu există evaluări
- Partial-Update Adaptive Signal Processing: Design Analysis and ImplementationDe la EverandPartial-Update Adaptive Signal Processing: Design Analysis and ImplementationÎncă nu există evaluări
- Optical and Microwave Lab Manual PDFDocument33 paginiOptical and Microwave Lab Manual PDFAravindhan SaravananÎncă nu există evaluări
- 40 Lessons On Digital CommunicationsDocument364 pagini40 Lessons On Digital Communicationsijaved88100% (1)
- Feedback Control SystemDocument40 paginiFeedback Control SystemMuhammad SaeedÎncă nu există evaluări
- FAMDocument8 paginiFAMAnanya ZabinÎncă nu există evaluări
- 54118-mt - Advanced Digital Signal ProcessingDocument2 pagini54118-mt - Advanced Digital Signal ProcessingSRINIVASA RAO GANTAÎncă nu există evaluări
- Engineering Optimization: An Introduction with Metaheuristic ApplicationsDe la EverandEngineering Optimization: An Introduction with Metaheuristic ApplicationsÎncă nu există evaluări
- Assignment 2 Img PDFDocument7 paginiAssignment 2 Img PDFUtkrisht KashyapÎncă nu există evaluări
- Vaishno College of Engineering: Name Roll No. Branch SubjectDocument11 paginiVaishno College of Engineering: Name Roll No. Branch SubjectUtkrisht KashyapÎncă nu există evaluări
- Project Synopsis: Bachelor On Engineering IN Computer Science & EngineeringDocument4 paginiProject Synopsis: Bachelor On Engineering IN Computer Science & EngineeringUtkrisht KashyapÎncă nu există evaluări
- Network Technologies: Internet Technologies and ApplicationsDocument48 paginiNetwork Technologies: Internet Technologies and ApplicationsUtkrisht KashyapÎncă nu există evaluări
- 330 Uday Kore Dissertation Report PDFDocument40 pagini330 Uday Kore Dissertation Report PDFuday koreÎncă nu există evaluări
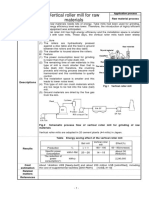
- Vertical Roller Mill For Raw MaterialsDocument1 paginăVertical Roller Mill For Raw Materialsअहा मधुमक्खीपालनÎncă nu există evaluări
- SOP Shear WallDocument2 paginiSOP Shear WallMuhammad SafdarÎncă nu există evaluări
- Setembro :outubroDocument4 paginiSetembro :outubroblackgotravelÎncă nu există evaluări
- Pronunciation NEWDocument7 paginiPronunciation NEWTrần Minh ThànhÎncă nu există evaluări
- Assignment No. 3 - Eng Maj 11Document4 paginiAssignment No. 3 - Eng Maj 11Mark GutierrezÎncă nu există evaluări
- Smart Agricultural Crop Prediction Using Machine LearningDocument9 paginiSmart Agricultural Crop Prediction Using Machine Learning19-512 Ratnala AshwiniÎncă nu există evaluări
- AvntDocument5 paginiAvntDeekshith YennamÎncă nu există evaluări
- Deltapoint: Installation and Operation Manual 12 GPM Water SaverDocument30 paginiDeltapoint: Installation and Operation Manual 12 GPM Water SaverRaúl FisÎncă nu există evaluări
- Undergraduate-Prospectus SsuetDocument141 paginiUndergraduate-Prospectus SsuetRuman AnwarÎncă nu există evaluări
- 5.monitoring and Controlling of Poultry Farm USing IoTDocument7 pagini5.monitoring and Controlling of Poultry Farm USing IoTTECHer YTÎncă nu există evaluări
- Lecture1 Object Oriented Paradigms, Abstraction, PrinciplesDocument55 paginiLecture1 Object Oriented Paradigms, Abstraction, PrinciplesAbdul HaseebÎncă nu există evaluări
- Plasma Cut Series: Operator ManualDocument20 paginiPlasma Cut Series: Operator ManualprisilliawongÎncă nu există evaluări
- RapidWright Tutorials (3) .OdtDocument17 paginiRapidWright Tutorials (3) .OdtSrijeet GuhaÎncă nu există evaluări
- RP Magz NOV1Document6 paginiRP Magz NOV1Mangata AcaronarÎncă nu există evaluări
- 09007dcc8030bc1cDocument5 pagini09007dcc8030bc1cVenkatesh PeruthambiÎncă nu există evaluări
- Mts InfoDocument2 paginiMts InfoscrbddÎncă nu există evaluări
- Library Copy Merge ProcedureDocument6 paginiLibrary Copy Merge ProcedurecarloÎncă nu există evaluări
- Type 3372 Electropneumatic Actuator: Versions With 120 and 350 CM and Type 3725 PositionerDocument44 paginiType 3372 Electropneumatic Actuator: Versions With 120 and 350 CM and Type 3725 Positioneroscarcito08Încă nu există evaluări
- Magna-Tyres brochure-USA ConstructionDocument14 paginiMagna-Tyres brochure-USA ConstructionKashyapÎncă nu există evaluări
- JISKOOT 210 SD Probe Rev 4Document49 paginiJISKOOT 210 SD Probe Rev 4ray mojicaÎncă nu există evaluări
- Ejma 2015Document306 paginiEjma 2015Azima Zalfa AuliyakÎncă nu există evaluări
- Juniper Netscreen ISG Series DatasheetDocument12 paginiJuniper Netscreen ISG Series Datasheetbh.youssefÎncă nu există evaluări
- Stress Analysis Slug Flow PulsationDocument18 paginiStress Analysis Slug Flow Pulsationbhavesh shuklaÎncă nu există evaluări
- DigitalForensics Autonomous SyllabusDocument2 paginiDigitalForensics Autonomous Syllabusswarna_793238588Încă nu există evaluări
- Backup Depth and Speed Display ALS6A200: Operations and Maintenance ManualDocument27 paginiBackup Depth and Speed Display ALS6A200: Operations and Maintenance ManualDiego CorderoÎncă nu există evaluări
- AS-T-T013 A15Air Conditioning System and Anti-TheftDocument56 paginiAS-T-T013 A15Air Conditioning System and Anti-TheftMtto Proyecto FúqueneÎncă nu există evaluări
- KBC GameDocument27 paginiKBC GamerishabhÎncă nu există evaluări
- Sec 01 PDFDocument23 paginiSec 01 PDFTalha AltafÎncă nu există evaluări
- Records - POEA,,GemmaDocument2 paginiRecords - POEA,,GemmaERROYD KEVIN TOLENTINOÎncă nu există evaluări