S-ar putea să vă placă și
- Informe de Pase de ViaDocument15 paginiInforme de Pase de ViaRuth Meria Zapata TiconaÎncă nu există evaluări
- Barrido Manual y MecanicoDocument12 paginiBarrido Manual y MecanicoPilar NaspudÎncă nu există evaluări
- A.P.U Obras CivilesDocument94 paginiA.P.U Obras CivilesNICOLEASCÎncă nu există evaluări
- Trabajo de Maquinaria para ObrasDocument29 paginiTrabajo de Maquinaria para ObrasEva Vilca MullisacaÎncă nu există evaluări
- Insumos Obras CivilesDocument154 paginiInsumos Obras CivilesjowacocoÎncă nu există evaluări
- Semana 06 - Captación de Manantiales PDFDocument54 paginiSemana 06 - Captación de Manantiales PDFLisber Principe AteroÎncă nu există evaluări
- SikaDocument8 paginiSikaAstrid Ruth Pomalaya CerrónÎncă nu există evaluări
- Diseño de SeñalizacionDocument12 paginiDiseño de SeñalizacionGuillermo Del ValleÎncă nu există evaluări
- Octava Práctica DirigidaDocument1 paginăOctava Práctica DirigidaObeth DominguezÎncă nu există evaluări
- Diseno de PresasDocument49 paginiDiseno de PresasFreddy Manuel Casas AlhuayÎncă nu există evaluări
- Presupuesto Campamentos v2Document7 paginiPresupuesto Campamentos v2Corporación TritonÎncă nu există evaluări
- Manual WathergmsDocument1.708 paginiManual WathergmsWilfredo AntallacaÎncă nu există evaluări
- Especificaciones Tecnicas ElectricasDocument1 paginăEspecificaciones Tecnicas ElectricasRene Tintaya QuispeÎncă nu există evaluări
- INFORME de MaquinariaDocument10 paginiINFORME de MaquinariaEdu Arias RamosÎncă nu există evaluări
- Informe de PVC y GeosinteticosDocument19 paginiInforme de PVC y GeosinteticosJhamir Gavidia ObregonÎncă nu există evaluări
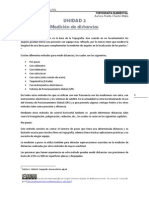
- Medicion de DistanciasDocument9 paginiMedicion de DistanciasLoboprimeroÎncă nu există evaluări
- Análisis Estructural-SeudotridimensionalDocument41 paginiAnálisis Estructural-SeudotridimensionaljulidanitzaÎncă nu există evaluări
- Enunciado TPNº 7-2019 - Alumnos - UTNDocument1 paginăEnunciado TPNº 7-2019 - Alumnos - UTNVirginia RochiettiÎncă nu există evaluări
- Puente 01Document12 paginiPuente 01Franklin Smith Aroni ChecmapoccoÎncă nu există evaluări
- Memoria de Calculo Epanet HuanucoDocument11 paginiMemoria de Calculo Epanet HuanucoMario Sergio S MÎncă nu există evaluări
- Formato Check List RH Rain CondorDocument2 paginiFormato Check List RH Rain CondorJuan AvilaÎncă nu există evaluări
- Manual de EmpedradosDocument96 paginiManual de EmpedradosRamiro JiménezÎncă nu există evaluări
- Especificaciones Tecnicas para SuelosDocument18 paginiEspecificaciones Tecnicas para SuelosYhghjj HhggyÎncă nu există evaluări
- Estudio Asignacion Agua - Parte BajaDocument170 paginiEstudio Asignacion Agua - Parte BajaJairo Miranda DíazÎncă nu există evaluări
- Especificaciones TecnicasDocument222 paginiEspecificaciones TecnicasKingefrain Yusuke AmamiyaÎncă nu există evaluări
- Tesis-Rendimientos de Maquinaria Pesada en Las Actividades de Conformacion y Compactacion - ZEGARRA MEJIA YILLIANEDocument198 paginiTesis-Rendimientos de Maquinaria Pesada en Las Actividades de Conformacion y Compactacion - ZEGARRA MEJIA YILLIANEEmerson LopezÎncă nu există evaluări
- Modelo PresupuestoDocument84 paginiModelo Presupuestojairolopez0211Încă nu există evaluări
- Metodo Numerico Fenomeno TranspDocument310 paginiMetodo Numerico Fenomeno TranspYolver peñalozaÎncă nu există evaluări
- TDR Sistema DrenajeDocument20 paginiTDR Sistema DrenajeLuis Raul Rojas GarciaÎncă nu există evaluări
- Diseño Rejas FinasDocument1 paginăDiseño Rejas FinasSp EliusÎncă nu există evaluări
- Analisis Costo Minimo de Expansion de CapacidadDocument12 paginiAnalisis Costo Minimo de Expansion de CapacidadFred Ancco RamirezÎncă nu există evaluări
- Informe de SeñalizaciónDocument9 paginiInforme de SeñalizaciónPOOL HMÎncă nu există evaluări
- 3 Ficha Niveles de Servicio y Estandares de Calidad Por ServicioDocument3 pagini3 Ficha Niveles de Servicio y Estandares de Calidad Por ServicioVictor Reyes SebastianÎncă nu există evaluări
- UniDocument1 paginăUniWILBER PACCO MAMANIÎncă nu există evaluări
- Inf TXT HidrologiaCanales Rev3Document14 paginiInf TXT HidrologiaCanales Rev3melodia20Încă nu există evaluări
- Universidad Nacional de Ingeniería: Facul Tao de Ingenieria CivilDocument151 paginiUniversidad Nacional de Ingeniería: Facul Tao de Ingenieria CivilluisÎncă nu există evaluări
- Esp. Tec. de Las Estrcuturas Civiles Pag. 23 32 PDFDocument196 paginiEsp. Tec. de Las Estrcuturas Civiles Pag. 23 32 PDFKevinÎncă nu există evaluări
- BicapaDocument277 paginiBicapainolo lopezÎncă nu există evaluări
- Memoria SimbeniDocument104 paginiMemoria SimbeniloyolalopezÎncă nu există evaluări
- Tesis Fajas MarconaDocument151 paginiTesis Fajas MarconaAntonio GuzmanÎncă nu există evaluări
- Modelos Matematicos - 2 PDFDocument61 paginiModelos Matematicos - 2 PDFKarem Meza Capcha100% (1)
- Sesión 3 - Gestión de La CalidadDocument21 paginiSesión 3 - Gestión de La CalidadreynosoÎncă nu există evaluări
- Transporte de SedimentoDocument28 paginiTransporte de Sedimento191162Încă nu există evaluări
- Estudio TopograficoDocument21 paginiEstudio TopograficoFernando Ticona AvendañoÎncă nu există evaluări
- Vertedores de Cresta Controlada Fernando Ojeda TorresDocument207 paginiVertedores de Cresta Controlada Fernando Ojeda TorresJose Antonio Zevallos AdrianoÎncă nu există evaluări
- PLANIFICACIÓN DE ACTIVADES SA-253 I 2023 - 1 Guillermo A CORDOVA JULCA v1 PDFDocument2 paginiPLANIFICACIÓN DE ACTIVADES SA-253 I 2023 - 1 Guillermo A CORDOVA JULCA v1 PDFJONATHAN BORIS LICAS AGUILARÎncă nu există evaluări
- Exposición Final RepresaDocument28 paginiExposición Final RepresaraulitocalleÎncă nu există evaluări
- CD 3154Document189 paginiCD 3154cesitar03100% (1)
- TRAB, PARCIAL EJEMPLO X-No Verificado SARAVIADocument23 paginiTRAB, PARCIAL EJEMPLO X-No Verificado SARAVIASo MuchÎncă nu există evaluări
- Memoria Geologia PDFDocument193 paginiMemoria Geologia PDFCesar Romero OscamaytaÎncă nu există evaluări
- Diapositiva DG AvanzadoDocument17 paginiDiapositiva DG AvanzadoJorge Romero100% (1)
- Checklist Presas MsDocument6 paginiChecklist Presas MsAMIRAÎncă nu există evaluări
- Vasquez CM PDFDocument271 paginiVasquez CM PDFAnderson Cocha SanchezÎncă nu există evaluări
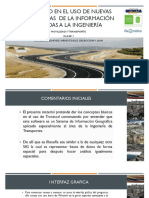
- Clase 1 TransCADDocument11 paginiClase 1 TransCADLaitonedÎncă nu există evaluări
- Libro Texto Explanaciones Plan D 28 MayoDocument228 paginiLibro Texto Explanaciones Plan D 28 MayoFélixMichaelHernándezLópezÎncă nu există evaluări
- Examen Energ 08d02d2018Document6 paginiExamen Energ 08d02d2018Ángel RodríguezÎncă nu există evaluări
- Inf. Mecanismo Recolector BasuraDocument7 paginiInf. Mecanismo Recolector BasuraManuel Villegas CÎncă nu există evaluări
- Informe CinemáticaDocument6 paginiInforme CinemáticaYisusÎncă nu există evaluări
- Laboratorio 4 Teoria de MaquinasDocument16 paginiLaboratorio 4 Teoria de MaquinasVALERIA NICOLE RODRIGUEZ PONCEÎncă nu există evaluări
- diSciascioPeaKlenzi ModeladoyanlisisdeladinmicadegrasAADECA2000 PDFDocument7 paginidiSciascioPeaKlenzi ModeladoyanlisisdeladinmicadegrasAADECA2000 PDFAna DelgadoÎncă nu există evaluări
- 2020B 1era PRACTICA Diseño Equipos DETCDocument1 pagină2020B 1era PRACTICA Diseño Equipos DETCPablo MamaniÎncă nu există evaluări
- 5 (Pag216 219)Document4 pagini5 (Pag216 219)Pablo MamaniÎncă nu există evaluări
- Esquema de Plan de TesisDocument10 paginiEsquema de Plan de TesisPablo MamaniÎncă nu există evaluări
- Gúia de Lab. 2, ModeloDocument1 paginăGúia de Lab. 2, ModeloPablo MamaniÎncă nu există evaluări
- Seleccion y Compra de Bienes Segun OSCEDocument16 paginiSeleccion y Compra de Bienes Segun OSCEDani ChambiÎncă nu există evaluări
- 5 Condensacion de Vapores SimplesDocument15 pagini5 Condensacion de Vapores SimplesPablo MamaniÎncă nu există evaluări
- 2020B 1era PRACTICA RECUPERACION Diseño Equipos DETCDocument1 pagină2020B 1era PRACTICA RECUPERACION Diseño Equipos DETCPablo MamaniÎncă nu există evaluări
- ESTATICADocument2 paginiESTATICAPablo MamaniÎncă nu există evaluări
- Tercera Evaluación - I&O - 14 - 08 - 20Document4 paginiTercera Evaluación - I&O - 14 - 08 - 20Pablo MamaniÎncă nu există evaluări
- Arado de VertederaDocument11 paginiArado de VertederaPablo MamaniÎncă nu există evaluări
- PRIMER EXAMEN Ventiladores y Compresores Grupo B - 2020-BDocument2 paginiPRIMER EXAMEN Ventiladores y Compresores Grupo B - 2020-BPablo MamaniÎncă nu există evaluări
- CONTROL 1 TERCERA PARTE ING. y MEDIO AMBIENTEDocument3 paginiCONTROL 1 TERCERA PARTE ING. y MEDIO AMBIENTEPablo MamaniÎncă nu există evaluări
- Ghantt TifDocument2 paginiGhantt TifPablo MamaniÎncă nu există evaluări
- Cuestionario de Centrales TermoelectricasDocument1 paginăCuestionario de Centrales TermoelectricasPablo MamaniÎncă nu există evaluări
- Modelo de SolicitudDocument1 paginăModelo de SolicitudAllison Villaizan100% (1)
- Solución:: Tanque ADocument6 paginiSolución:: Tanque APablo MamaniÎncă nu există evaluări
- Problema 5.8-1 EstructuralDocument2 paginiProblema 5.8-1 EstructuralPablo MamaniÎncă nu există evaluări
- Thomas Examen 2.0Document5 paginiThomas Examen 2.0Pablo MamaniÎncă nu există evaluări
- Videos CaudalimetroDocument1 paginăVideos CaudalimetroPablo MamaniÎncă nu există evaluări
- IntroduccionDocument89 paginiIntroduccionPablo MamaniÎncă nu există evaluări
- Tercera Evaluación - I&O - 14 - 08 - 20Document4 paginiTercera Evaluación - I&O - 14 - 08 - 20Pablo MamaniÎncă nu există evaluări
- Bombas: Prof. Dr. Emilio C. Nelli SilvaDocument11 paginiBombas: Prof. Dr. Emilio C. Nelli SilvaPablo MamaniÎncă nu există evaluări
- Problema Final 3er Examen - AlumnosDocument2 paginiProblema Final 3er Examen - AlumnosPablo MamaniÎncă nu există evaluări
- Ejericios EstructuralDocument6 paginiEjericios EstructuralPablo MamaniÎncă nu există evaluări
- Malla Curricular PDFDocument1 paginăMalla Curricular PDFPablo MamaniÎncă nu există evaluări
- Ejericios EstructuralDocument6 paginiEjericios EstructuralPablo MamaniÎncă nu există evaluări
- Deformacion en VigasDocument43 paginiDeformacion en Vigas18283967133% (3)
- Presupuesto Bajo CeroDocument6 paginiPresupuesto Bajo Cerodbarbosa9709Încă nu există evaluări
- Debate Sobre PucciniDocument6 paginiDebate Sobre PuccinijonnyleiruÎncă nu există evaluări
- Guía de Polímeros 4° MedioDocument3 paginiGuía de Polímeros 4° MedioPilar VildosolaÎncă nu există evaluări
- ZMG Salmo 119p1Document9 paginiZMG Salmo 119p1Juan Martínez OchoaÎncă nu există evaluări
- Dialnet 1 JavanetDocument9 paginiDialnet 1 JavanetLuisGenaroRoblesOréÎncă nu există evaluări
- 12 Cursos Gratis Online de Marketing Político (Videocursos, PDF y Canales para Ver en Youtube) - AlRetoDocument3 pagini12 Cursos Gratis Online de Marketing Político (Videocursos, PDF y Canales para Ver en Youtube) - AlRetoCastalia VargasÎncă nu există evaluări
- Resumen Inventario Modelo de Gestion de OperacionesDocument4 paginiResumen Inventario Modelo de Gestion de OperacionesRafael Sepulveda RojasÎncă nu există evaluări
- Porque Es Importante Masticar Bien Los AlimentosDocument6 paginiPorque Es Importante Masticar Bien Los AlimentosSergio PolaniaÎncă nu există evaluări
- ImpuestoDocument4 paginiImpuestoFrancisco Javie Ortega ÑÎncă nu există evaluări
- Apolo y Dionisos PDFDocument103 paginiApolo y Dionisos PDFdaferromÎncă nu există evaluări
- Dussel Enrique - para Una Erotica Latinoamericana PDFDocument142 paginiDussel Enrique - para Una Erotica Latinoamericana PDFPoni Maldit100% (1)
- Sesion de Aprendizaje 2019Document191 paginiSesion de Aprendizaje 2019juanitaÎncă nu există evaluări
- Actividad 3 - Comparando Saberes Sobre Los Mecanismos Alternativos de Resolución de Conflictos, Actividad IndividualDocument11 paginiActividad 3 - Comparando Saberes Sobre Los Mecanismos Alternativos de Resolución de Conflictos, Actividad IndividualWistonFelipeOvalle100% (1)
- Taller - Estudio de Caso de ComunicaciónDocument3 paginiTaller - Estudio de Caso de ComunicaciónKarol Hernandez100% (1)
- Reporte de Farenheit 451Document3 paginiReporte de Farenheit 451Nea612Încă nu există evaluări
- GEOMARKETINGDocument13 paginiGEOMARKETINGLizbethReyesOÎncă nu există evaluări
- Comportamiento Organizacional 15edi RobbinsDocument11 paginiComportamiento Organizacional 15edi RobbinsErick Santos0% (1)
- Proyecto 5: Construimos Un Pais Libre de Discriminacion Con Una Ciudadania Critica Y ActivaDocument5 paginiProyecto 5: Construimos Un Pais Libre de Discriminacion Con Una Ciudadania Critica Y ActivaAriadne GarciaÎncă nu există evaluări
- Apuntes Medina Legal - by Shirley C.JDocument6 paginiApuntes Medina Legal - by Shirley C.JShirley CambindoÎncă nu există evaluări
- RIESCO CHUECA P (main res.); ALCÁNTARA J; CÁCERES CLAVERO F; DIAZ IGLESIAS JM; GUISLANZONI M; GÓMEZ ZOTANO J; GUERRERO ÁLVAREZ JJ; MOREIRA MADUEÑO JM; RAMÍREZ RAMÍREZ A; RODRÍGUEZ RODRÍGUEZ J; ZOIDO NARANJO F (ed.) (2014) Bases paisaje Andalucía SCIPA. Aplicac. a Sierra Morena. Junta de Andalucía.Document536 paginiRIESCO CHUECA P (main res.); ALCÁNTARA J; CÁCERES CLAVERO F; DIAZ IGLESIAS JM; GUISLANZONI M; GÓMEZ ZOTANO J; GUERRERO ÁLVAREZ JJ; MOREIRA MADUEÑO JM; RAMÍREZ RAMÍREZ A; RODRÍGUEZ RODRÍGUEZ J; ZOIDO NARANJO F (ed.) (2014) Bases paisaje Andalucía SCIPA. Aplicac. a Sierra Morena. Junta de Andalucía.Pascual RIESCO CHUECAÎncă nu există evaluări
- Tipos de Comunicación OralDocument5 paginiTipos de Comunicación OralJOSE DAVID LOPEZ CASTILLOÎncă nu există evaluări
- COY1 Torres Rivas 258 PDFDocument12 paginiCOY1 Torres Rivas 258 PDFDanilo HernandezÎncă nu există evaluări
- Tema 4 LA PRUEBA DEL LIDERAZGODocument8 paginiTema 4 LA PRUEBA DEL LIDERAZGONicol TorresÎncă nu există evaluări
- Flashcards CiruDocument8 paginiFlashcards CiruSandra M del SobralÎncă nu există evaluări
- Informe de Practicas AnaDocument43 paginiInforme de Practicas AnaAnnaAlfaroGonzales100% (1)
- Taller de Diarrea. Prevencion, Evaluacion y ClasificacionDocument7 paginiTaller de Diarrea. Prevencion, Evaluacion y ClasificacionesmeraldaÎncă nu există evaluări
- Donacion Navideña2Document2 paginiDonacion Navideña2groveriv0% (1)
- Semana 2 Diagnóstico o Aprestamiento TerceroDocument6 paginiSemana 2 Diagnóstico o Aprestamiento TerceroPriscila MosqueraÎncă nu există evaluări
- Marshall Sahlins (Trabajo Practico)Document5 paginiMarshall Sahlins (Trabajo Practico)Nadia NavarroÎncă nu există evaluări
- 8 - Cap 4 PrácticaDocument8 pagini8 - Cap 4 PrácticaSantiago HeinÎncă nu există evaluări