S-ar putea să vă placă și
- Teorias de La AdministraciónDocument25 paginiTeorias de La AdministraciónCirimar Antonella Castellano Rangel67% (3)
- Complejidad y Deporte - Balague Serre, Natalia - TorrentDocument171 paginiComplejidad y Deporte - Balague Serre, Natalia - TorrentFernando Hurtado Bonilla100% (2)
- Acta de Entrega de CelularDocument25 paginiActa de Entrega de CelularJhon Suarez100% (1)
- Tema 1. Lenguaje y Comunicaci+ N (Pimar)Document9 paginiTema 1. Lenguaje y Comunicaci+ N (Pimar)mamasilosabeÎncă nu există evaluări
- 02 - INFORME Técnico PedagógicoDocument5 pagini02 - INFORME Técnico PedagógicoOLMER VALENCIA ASTETEÎncă nu există evaluări
- Tema 6 El Proceso de La ComunicaciónDocument9 paginiTema 6 El Proceso de La ComunicaciónIria Hernández Schweicez100% (1)
- Escribimos AdivinanzasDocument3 paginiEscribimos AdivinanzasJhenavi SystemÎncă nu există evaluări
- El Género y El Número Del SustantivoDocument7 paginiEl Género y El Número Del SustantivoJhon SuarezÎncă nu există evaluări
- FASE 4 - ColaborativoDocument2 paginiFASE 4 - ColaborativoJhon SuarezÎncă nu există evaluări
- Nacido Via HijaDocument1 paginăNacido Via HijaJhon SuarezÎncă nu există evaluări
- Geometria MedidasDocument3 paginiGeometria MedidasJhon SuarezÎncă nu există evaluări
- Anexo EstandarDocument3 paginiAnexo EstandarJhon SuarezÎncă nu există evaluări
- CromogramaDocument2 paginiCromogramaJhon SuarezÎncă nu există evaluări
- Acta de EntregaDocument3 paginiActa de EntregaJhon SuarezÎncă nu există evaluări
- Acta de EntregaDocument3 paginiActa de EntregaJhon SuarezÎncă nu există evaluări
- Acta de Entrega de Celular32323Document25 paginiActa de Entrega de Celular32323Jhon SuarezÎncă nu există evaluări
- Actividadcolaborativa JhonsuarezDocument4 paginiActividadcolaborativa JhonsuarezJhon SuarezÎncă nu există evaluări
- Anexo EstandarDocument3 paginiAnexo EstandarJhon SuarezÎncă nu există evaluări
- Acta Entrega Celulares PIXIDocument1 paginăActa Entrega Celulares PIXIJhon SuarezÎncă nu există evaluări
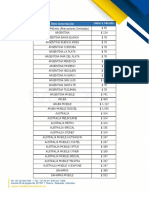
- Costos Llamadas InternacionalesDocument10 paginiCostos Llamadas InternacionalesJhon SuarezÎncă nu există evaluări
- ACTA REUNION Agosto 08 & 09 2019 Union Rio Pamplonita CucutaDocument4 paginiACTA REUNION Agosto 08 & 09 2019 Union Rio Pamplonita CucutaJhon SuarezÎncă nu există evaluări
- Colaborativo Fase4Document6 paginiColaborativo Fase4Jhon SuarezÎncă nu există evaluări
- Colaborativo Fase4 CristianTovarDocument4 paginiColaborativo Fase4 CristianTovarJhon SuarezÎncă nu există evaluări
- PreguntaDocument7 paginiPreguntaalejandraÎncă nu există evaluări
- Fase 3 - Lluvia de Ideas - Sebastian Amaya-299011 - 34Document10 paginiFase 3 - Lluvia de Ideas - Sebastian Amaya-299011 - 34Jhon SuarezÎncă nu există evaluări
- Unidad1Tarea1 JhonSuarezDocument8 paginiUnidad1Tarea1 JhonSuarezJhon SuarezÎncă nu există evaluări
- ERROR Y ECUACIONES NO LINEALESDocument37 paginiERROR Y ECUACIONES NO LINEALESJhon SuarezÎncă nu există evaluări
- Acta de EntregaDocument3 paginiActa de EntregaJhon SuarezÎncă nu există evaluări
- ACTA REUNION Agosto 08 & 09 2019 Union Rio Pamplonita CucutaDocument4 paginiACTA REUNION Agosto 08 & 09 2019 Union Rio Pamplonita CucutaJhon SuarezÎncă nu există evaluări
- 3953 Robotica Jose Camilo Mari NDocument9 pagini3953 Robotica Jose Camilo Mari NSoretroath CutÎncă nu există evaluări
- En El Contexto de SostenibilidadDocument2 paginiEn El Contexto de SostenibilidadJhon SuarezÎncă nu există evaluări
- Colaborativo Fase4 CristianTovarDocument4 paginiColaborativo Fase4 CristianTovarJhon SuarezÎncă nu există evaluări
- Actividad 3 Desarrollar Fase de CampoDocument13 paginiActividad 3 Desarrollar Fase de CampoJhon SuarezÎncă nu există evaluări
- Actividad 3 Desarrollar Fase de Campo JhonSuarezDocument45 paginiActividad 3 Desarrollar Fase de Campo JhonSuarezJhon SuarezÎncă nu există evaluări
- Erika Vanegas - Actividad 3Document20 paginiErika Vanegas - Actividad 3Jhon SuarezÎncă nu există evaluări
- Inventario de Equipos Computo Pamplona - Cucuta Sacyr y UvrpDocument2 paginiInventario de Equipos Computo Pamplona - Cucuta Sacyr y UvrpJhon SuarezÎncă nu există evaluări
- Solution Partners y Tableristas 2014Document7 paginiSolution Partners y Tableristas 2014HUGOÎncă nu există evaluări
- ¿Qué Es La Comunicación?: - Hablas Por El Móvil y Se Acaba La Batería. Receptor Codigo SituacionDocument6 pagini¿Qué Es La Comunicación?: - Hablas Por El Móvil y Se Acaba La Batería. Receptor Codigo SituacionRumanÎncă nu există evaluări
- Sintonizacion de Control Ad or PI y PID Utilizando Modelos de Polo Doble Mas Tiempo MuertoDocument9 paginiSintonizacion de Control Ad or PI y PID Utilizando Modelos de Polo Doble Mas Tiempo MuertoR Rdez DaveÎncă nu există evaluări
- Cursos de Ricardo PalmsDocument2 paginiCursos de Ricardo PalmsKevin SantosÎncă nu există evaluări
- Definicion de La InformacionDocument7 paginiDefinicion de La InformacionAndres CiqueroÎncă nu există evaluări
- Practica4 Spa PidDocument14 paginiPractica4 Spa PidjoseluisleonÎncă nu există evaluări
- Informe CibernéticaDocument11 paginiInforme CibernéticaJAIR0 VALLEJOS CHUQUIZUTAÎncă nu există evaluări
- Automatizacion y Control IndustrialDocument5 paginiAutomatizacion y Control IndustrialYeimi Lorena Velasquez SosaÎncă nu există evaluări
- Comunicacion Verbal y No Verbal Cuadro ComparativoDocument5 paginiComunicacion Verbal y No Verbal Cuadro ComparativoSepro Café InternetÎncă nu există evaluări
- ComunicaciónDocument5 paginiComunicaciónYainer FlorezÎncă nu există evaluări
- Guia 2 La ComunicacionDocument4 paginiGuia 2 La ComunicacionFrancy Yulieth Suarez LoaizaÎncă nu există evaluări
- BodeDocument35 paginiBodeBrayanÎncă nu există evaluări
- Tema A Elegir - Rivera Lopez Jose EduardoDocument6 paginiTema A Elegir - Rivera Lopez Jose EduardoJosé Eduardo Rivera LópezÎncă nu există evaluări
- Maestria Electronica y AutomatizacionDocument24 paginiMaestria Electronica y AutomatizacionBorisÎncă nu există evaluări
- Modulo de Req Cae A Distancia 2006Document81 paginiModulo de Req Cae A Distancia 2006JULIOÎncă nu există evaluări
- Investigacion de La Inteligencia ArtificialDocument7 paginiInvestigacion de La Inteligencia ArtificialHenry JacintoÎncă nu există evaluări
- Comunicación y Lenguaje PAOLA GARZONDocument14 paginiComunicación y Lenguaje PAOLA GARZONJoel TulcanazoÎncă nu există evaluări
- Ejercicios 5Document13 paginiEjercicios 5RobertAragónLduÎncă nu există evaluări
- Una Unidad Sagrada PDFDocument33 paginiUna Unidad Sagrada PDFJack SkellingtonÎncă nu există evaluări
- SISTEMICA Resumenes-1Document86 paginiSISTEMICA Resumenes-1priscilarf67% (3)
- L10 - Control Cascada DR22Document11 paginiL10 - Control Cascada DR22Benjhy Jordan Castillo ValeraÎncă nu există evaluări
- Clase 08 - 09 - 14Document16 paginiClase 08 - 09 - 14Amanda ReillyÎncă nu există evaluări
- Utp - Sirn - S2 - 3 - Rna 2012-2Document61 paginiUtp - Sirn - S2 - 3 - Rna 2012-2anderson pisconteÎncă nu există evaluări