S-ar putea să vă placă și
- Post Processing Methods Used To Improve Surface Finish of Products Which Are Manufactured by AM - A ReviewDocument7 paginiPost Processing Methods Used To Improve Surface Finish of Products Which Are Manufactured by AM - A ReviewMaroknightÎncă nu există evaluări
- Reliability. The Single Integrated and Engine Mounted Control Module Replaces TheDocument2 paginiReliability. The Single Integrated and Engine Mounted Control Module Replaces TheJaafar Fadhil.AbboodÎncă nu există evaluări
- FM 300Document5 paginiFM 300Happy DealÎncă nu există evaluări
- New Cascadia Driver's ManualDocument292 paginiNew Cascadia Driver's ManualVictor Nazario Solís RamirezÎncă nu există evaluări
- AASHTO Publications Catalog - 2017, Volume 2 (Spring)Document21 paginiAASHTO Publications Catalog - 2017, Volume 2 (Spring)Waqas Ahmad AbbasiÎncă nu există evaluări
- 056-023 Adding New CAN FilesDocument2 pagini056-023 Adding New CAN Filesrenato_14078Încă nu există evaluări
- SM - 4700 Series - 912791RJDocument7 paginiSM - 4700 Series - 912791RJjmussolini17Încă nu există evaluări
- Cummins PDFDocument2 paginiCummins PDFCesar ZarateÎncă nu există evaluări
- NC-559-ASM, No-Clean Solder Paste: Product Data SheetDocument2 paginiNC-559-ASM, No-Clean Solder Paste: Product Data SheetAkhmad MukhsinÎncă nu există evaluări
- IC-F70 Series PDFDocument58 paginiIC-F70 Series PDFTopcom Toki-VokiÎncă nu există evaluări
- Wiring DiagramDocument93 paginiWiring DiagramAggrey-Anthony DuncanÎncă nu există evaluări
- Diagramas HVDocument3.544 paginiDiagramas HVToy Story100% (1)
- Service Manual Trucks: Frame Rails and Crossmembers VN/VHDDocument66 paginiService Manual Trucks: Frame Rails and Crossmembers VN/VHDsetiup holjiÎncă nu există evaluări
- Consumables For The Welding of Hardox, Strenx™, Toolox and Armox Techsupport #60Document8 paginiConsumables For The Welding of Hardox, Strenx™, Toolox and Armox Techsupport #60MOÎncă nu există evaluări
- Heavy-Duty Diagnostic: Product CatalogDocument12 paginiHeavy-Duty Diagnostic: Product CatalogMartin CasillasÎncă nu există evaluări
- Test PDFDocument481 paginiTest PDFHung Hua NhuÎncă nu există evaluări
- 2018 2020 MV SerieDocument1.762 pagini2018 2020 MV SeriePablo Porras100% (1)
- Peterbuilt Model - 220 - Body - Builder - Manual - 2017Document85 paginiPeterbuilt Model - 220 - Body - Builder - Manual - 2017Raj ChoudharyÎncă nu există evaluări
- tp99124 PDFDocument20 paginitp99124 PDFDieselkÎncă nu există evaluări
- Ge W1001016 (TJK)Document118 paginiGe W1001016 (TJK)Ana Hernández MonterrubioÎncă nu există evaluări
- VN VHD Us07 Schmatics VolvoDocument80 paginiVN VHD Us07 Schmatics VolvoIngram CharlesÎncă nu există evaluări
- Ifr Com 120bDocument4 paginiIfr Com 120bYohana Milena Gómez GómezÎncă nu există evaluări
- 00 017695Document4 pagini00 017695Walter LazoÎncă nu există evaluări
- Fault Log Viewing OP1Document2 paginiFault Log Viewing OP1wagner_guimarães_1Încă nu există evaluări
- 2GCS303012A0031-Capacitor Banks - Quick Selection Guide ABBDocument3 pagini2GCS303012A0031-Capacitor Banks - Quick Selection Guide ABBSubhash KashyapÎncă nu există evaluări
- NEHS0708Document9 paginiNEHS0708Victor Nunez100% (1)
- Foreword: Warranty Information For North America Booklet, andDocument328 paginiForeword: Warranty Information For North America Booklet, andfernandoÎncă nu există evaluări
- Valvetronic EnginessDocument5 paginiValvetronic EnginessMarie-belle ChallitaÎncă nu există evaluări
- ST 1217 Rev C 01 - 08 - 2018Document2 paginiST 1217 Rev C 01 - 08 - 2018Nacer NacerÎncă nu există evaluări
- OnGuard Collision Mitigation SystemDocument47 paginiOnGuard Collision Mitigation SystemAlexanderÎncă nu există evaluări
- Kioti Daedong CK2610 (H), CK3510 (H), CK4010 (H) Tractors Service ManualDocument19 paginiKioti Daedong CK2610 (H), CK3510 (H), CK4010 (H) Tractors Service ManualLisakolyÎncă nu există evaluări
- CVVT System CVVT SystemDocument15 paginiCVVT System CVVT SystemSubbu Kannappan SrinivasanÎncă nu există evaluări
- SU Idiot GuideDocument7 paginiSU Idiot GuideHimanshu SinghÎncă nu există evaluări
- Bomba MORODocument29 paginiBomba MOROcesarvalenciaperdomoÎncă nu există evaluări
- Heavy-Duty Right To Repair Status Update: Kenneth Degrant - Drew TechnologiesDocument25 paginiHeavy-Duty Right To Repair Status Update: Kenneth Degrant - Drew TechnologiesAntony100% (1)
- C13 Service Manual - 1Document180 paginiC13 Service Manual - 1mes100% (1)
- AC Machine ManualDocument25 paginiAC Machine ManualmainesquirrelÎncă nu există evaluări
- Installation Manual & Technical Information Automatic Laser Control Control Box Model CB26 Model CB24+Document33 paginiInstallation Manual & Technical Information Automatic Laser Control Control Box Model CB26 Model CB24+magzigio100% (1)
- 00 CANFDSymposium Zeltwanger CiADocument11 pagini00 CANFDSymposium Zeltwanger CiAChihming HungÎncă nu există evaluări
- Compresor: Servi CE Parts LI ST F or 05G BUS 41 CF M HGB MF R # 6GCH00GTA03404Document12 paginiCompresor: Servi CE Parts LI ST F or 05G BUS 41 CF M HGB MF R # 6GCH00GTA03404Pablo Porras100% (1)
- Aeb09202 PDFDocument16 paginiAeb09202 PDFCesar G.Încă nu există evaluări
- MRS 07updateDocument3 paginiMRS 07updateИгорь БасмановÎncă nu există evaluări
- Aftermarket Replacement Guide 2010Document251 paginiAftermarket Replacement Guide 2010AnDy RacerÎncă nu există evaluări
- Kaiser WhaleDocument2 paginiKaiser WhaleKathirrasuÎncă nu există evaluări
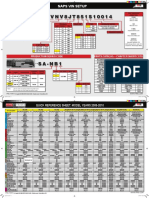
- HINO VIN Code - LT-0013 Quick Reference Counter CardDocument2 paginiHINO VIN Code - LT-0013 Quick Reference Counter CardVerónica Maila FigueroaÎncă nu există evaluări
- Power DistributionDocument8 paginiPower Distributionluc-andré lalibertéÎncă nu există evaluări
- Deutsch DRC Connector SeriesDocument4 paginiDeutsch DRC Connector SeriesO mecanicoÎncă nu există evaluări
- Simard Workshop ManualDocument26 paginiSimard Workshop ManualDawn Hall50% (2)
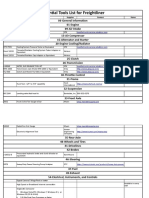
- Essential Tool List For Freightliner - MasterDocument4 paginiEssential Tool List For Freightliner - MasterAngel FraustoÎncă nu există evaluări
- PCpaK User ManualDocument61 paginiPCpaK User ManualJure MrduljasÎncă nu există evaluări
- Wiring ComunicacionDocument4 paginiWiring ComunicacionHamilton MirandaÎncă nu există evaluări
- Gen Datalink CommDocument323 paginiGen Datalink CommJohn SantosÎncă nu există evaluări
- Vecu5 pc28 23970505011wDocument145 paginiVecu5 pc28 23970505011wramon hidalgoÎncă nu există evaluări
- Cummins AEB 24.20 Iss. 2010-09, Hoses and Connections (ID 157459)Document35 paginiCummins AEB 24.20 Iss. 2010-09, Hoses and Connections (ID 157459)Krzysztof OkrajekÎncă nu există evaluări
- Instek SPD 3606 User ManualDocument34 paginiInstek SPD 3606 User ManualMengHan LuÎncă nu există evaluări
- Aeb 02138Document33 paginiAeb 02138Bosko KalicaninÎncă nu există evaluări
- F6Document2 paginiF6namduong368Încă nu există evaluări
- 02b2462c f0d8 41f7 8c8c D6ce304e67cc Sterling Acterra Driver's ManualDocument148 pagini02b2462c f0d8 41f7 8c8c D6ce304e67cc Sterling Acterra Driver's ManualEnrique GiesbrechtÎncă nu există evaluări
- Sciencedirect Sciencedirect SciencedirectDocument6 paginiSciencedirect Sciencedirect SciencedirectFelipe RuizÎncă nu există evaluări
- Lead Time Prediction Using Machine Learning Algorithms A Case Study by A Semiconductor ManufacturerDocument6 paginiLead Time Prediction Using Machine Learning Algorithms A Case Study by A Semiconductor ManufacturerRicardo KatoÎncă nu există evaluări
- Bosch cp4 PumpDocument4 paginiBosch cp4 PumpIonut-alexandru Iordache100% (5)
- Induction Course For Tech002Document2 paginiInduction Course For Tech002Jennifer GuthrieÎncă nu există evaluări
- Abraçando o Amanhã - Martin ScottDocument200 paginiAbraçando o Amanhã - Martin ScottAndréiaPerioto75% (4)
- Bellus Minni Book GuideDocument9 paginiBellus Minni Book GuideMikkjel ThonÎncă nu există evaluări
- Reserve Bank of India-ShrikantDocument53 paginiReserve Bank of India-ShrikantShrikant BaldawaÎncă nu există evaluări
- The Sixth Sense Technology: Vidyalankar Institute of Technology Department of MmsDocument23 paginiThe Sixth Sense Technology: Vidyalankar Institute of Technology Department of MmsAbhinandan SawantÎncă nu există evaluări
- Stadium ACL Test PlanDocument10 paginiStadium ACL Test Planonlycisco.tkÎncă nu există evaluări
- Tvs Motors FinalDocument68 paginiTvs Motors FinalNikhil SakleshpurÎncă nu există evaluări
- Dorma 2Document8 paginiDorma 2omarÎncă nu există evaluări
- Admin JobsDocument4 paginiAdmin JobsLakshmann ChettiarÎncă nu există evaluări
- Rec Erc 78 08Document22 paginiRec Erc 78 08Jerry PellerÎncă nu există evaluări
- RG Cabble Losses ChartDocument7 paginiRG Cabble Losses Chartsyr_rif11Încă nu există evaluări
- (Free Scores - Com) - Di Capua Eduardo o Sole Mio 22271 PDFDocument3 pagini(Free Scores - Com) - Di Capua Eduardo o Sole Mio 22271 PDFSeulki HongÎncă nu există evaluări
- An5200 Eogas AbatorDocument3 paginiAn5200 Eogas AbatorDinhtrung TruongÎncă nu există evaluări
- MS Samsung Ar7000 Inverter Airconditioning PDFDocument2 paginiMS Samsung Ar7000 Inverter Airconditioning PDFMacSparesÎncă nu există evaluări
- Sequence Based SpecificationsDocument11 paginiSequence Based SpecificationsrexthrottleÎncă nu există evaluări
- Technical Data: 1. DescriptionDocument6 paginiTechnical Data: 1. DescriptionAnthonyÎncă nu există evaluări
- Detector Balance Induccion.Document11 paginiDetector Balance Induccion.Jesus OrtizÎncă nu există evaluări
- Desain Ruangan CT-ScanDocument3 paginiDesain Ruangan CT-ScannewmanonmarsÎncă nu există evaluări
- IOCL-EKC-STATIONARY CASCADE-DIA 559 X 06 CYLINDER X 3000 LTR-SHEET 5 OF 5-REV.01Document1 paginăIOCL-EKC-STATIONARY CASCADE-DIA 559 X 06 CYLINDER X 3000 LTR-SHEET 5 OF 5-REV.01subudhiprasannaÎncă nu există evaluări
- Oil and DrillingDocument3 paginiOil and DrillingAmri YogiÎncă nu există evaluări
- Fingerprint Recognition: Some Biological Principles (Moenssens 1971) Related To Fingerprint Recognition Are As FollowsDocument40 paginiFingerprint Recognition: Some Biological Principles (Moenssens 1971) Related To Fingerprint Recognition Are As Follows00matrix00100% (1)
- Lab 2 WorksheetDocument3 paginiLab 2 WorksheetPohuyistÎncă nu există evaluări
- PM Trailer 16T General Purpose RevBDocument60 paginiPM Trailer 16T General Purpose RevBHANNESÎncă nu există evaluări
- ENG - B1.1.0106S Talking On The Phone PDFDocument23 paginiENG - B1.1.0106S Talking On The Phone PDFankira78Încă nu există evaluări
- Prescribing and Describing: Popular and Academic Views of "Correctness"Document17 paginiPrescribing and Describing: Popular and Academic Views of "Correctness"zaid ahmed100% (2)
- Unit-4 Refrigeration and Air ConditioningDocument11 paginiUnit-4 Refrigeration and Air ConditioningMatthew SmithÎncă nu există evaluări
- WI - C.4.1 Set Up Site Documentation V1.1aDocument5 paginiWI - C.4.1 Set Up Site Documentation V1.1ayoen_anÎncă nu există evaluări
- The Great Eggscape: Corey Kelvin Group 73 Nizam Umayr PatriciaDocument7 paginiThe Great Eggscape: Corey Kelvin Group 73 Nizam Umayr PatriciaLegendaryNÎncă nu există evaluări
- Sully: The Untold Story Behind the Miracle on the HudsonDe la EverandSully: The Untold Story Behind the Miracle on the HudsonEvaluare: 4 din 5 stele4/5 (103)
- The Future of Geography: How the Competition in Space Will Change Our WorldDe la EverandThe Future of Geography: How the Competition in Space Will Change Our WorldEvaluare: 4 din 5 stele4/5 (6)
- The Fabric of Civilization: How Textiles Made the WorldDe la EverandThe Fabric of Civilization: How Textiles Made the WorldEvaluare: 4.5 din 5 stele4.5/5 (58)
- Hero Found: The Greatest POW Escape of the Vietnam WarDe la EverandHero Found: The Greatest POW Escape of the Vietnam WarEvaluare: 4 din 5 stele4/5 (19)
- Fire on the Horizon: The Untold Story of the Gulf Oil DisasterDe la EverandFire on the Horizon: The Untold Story of the Gulf Oil DisasterÎncă nu există evaluări
- System Error: Where Big Tech Went Wrong and How We Can RebootDe la EverandSystem Error: Where Big Tech Went Wrong and How We Can RebootÎncă nu există evaluări
- The Technology Trap: Capital, Labor, and Power in the Age of AutomationDe la EverandThe Technology Trap: Capital, Labor, and Power in the Age of AutomationEvaluare: 4.5 din 5 stele4.5/5 (46)
- Dirt to Soil: One Family’s Journey into Regenerative AgricultureDe la EverandDirt to Soil: One Family’s Journey into Regenerative AgricultureEvaluare: 5 din 5 stele5/5 (125)
- The End of Craving: Recovering the Lost Wisdom of Eating WellDe la EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellEvaluare: 4.5 din 5 stele4.5/5 (83)
- Pale Blue Dot: A Vision of the Human Future in SpaceDe la EverandPale Blue Dot: A Vision of the Human Future in SpaceEvaluare: 4.5 din 5 stele4.5/5 (588)
- Four Battlegrounds: Power in the Age of Artificial IntelligenceDe la EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceEvaluare: 5 din 5 stele5/5 (5)
- Transformed: Moving to the Product Operating ModelDe la EverandTransformed: Moving to the Product Operating ModelEvaluare: 4 din 5 stele4/5 (1)
- When the Heavens Went on Sale: The Misfits and Geniuses Racing to Put Space Within ReachDe la EverandWhen the Heavens Went on Sale: The Misfits and Geniuses Racing to Put Space Within ReachEvaluare: 3.5 din 5 stele3.5/5 (6)
- Permaculture for the Rest of Us: Abundant Living on Less than an AcreDe la EverandPermaculture for the Rest of Us: Abundant Living on Less than an AcreEvaluare: 4.5 din 5 stele4.5/5 (33)
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestDe la EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestEvaluare: 4 din 5 stele4/5 (28)
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaDe la EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaÎncă nu există evaluări
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyDe la EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyÎncă nu există evaluări
- Mini Farming: Self-Sufficiency on 1/4 AcreDe la EverandMini Farming: Self-Sufficiency on 1/4 AcreEvaluare: 4 din 5 stele4/5 (76)
- Packing for Mars: The Curious Science of Life in the VoidDe la EverandPacking for Mars: The Curious Science of Life in the VoidEvaluare: 4 din 5 stele4/5 (1396)
- Highest Duty: My Search for What Really MattersDe la EverandHighest Duty: My Search for What Really MattersÎncă nu există evaluări
- How to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerDe la EverandHow to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerEvaluare: 4.5 din 5 stele4.5/5 (54)
- The Book of the Moon: A Guide to Our Closest NeighborDe la EverandThe Book of the Moon: A Guide to Our Closest NeighborEvaluare: 4.5 din 5 stele4.5/5 (11)
- Process Plant Equipment: Operation, Control, and ReliabilityDe la EverandProcess Plant Equipment: Operation, Control, and ReliabilityEvaluare: 5 din 5 stele5/5 (1)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindDe la EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindÎncă nu există evaluări
- Lean Six Sigma: The Ultimate Guide to Lean Six Sigma, Lean Enterprise, and Lean Manufacturing, with Tools Included for Increased Efficiency and Higher Customer SatisfactionDe la EverandLean Six Sigma: The Ultimate Guide to Lean Six Sigma, Lean Enterprise, and Lean Manufacturing, with Tools Included for Increased Efficiency and Higher Customer SatisfactionEvaluare: 5 din 5 stele5/5 (2)
- From Darwin to Derrida: Selfish Genes, Social Selves, and the Meanings of LifeDe la EverandFrom Darwin to Derrida: Selfish Genes, Social Selves, and the Meanings of LifeEvaluare: 4 din 5 stele4/5 (2)