S-ar putea să vă placă și
- Engine and Transmission Systems ExplainedDocument36 paginiEngine and Transmission Systems ExplainedArulmuruganÎncă nu există evaluări
- Multi Port Fuel Injection SystemDocument4 paginiMulti Port Fuel Injection SystemVarsha SreekumarÎncă nu există evaluări
- Multi Point Fuel Injection SystemDocument12 paginiMulti Point Fuel Injection Systemashwini yewaleÎncă nu există evaluări
- Common Rail Fuel System: How It Works & Benefits Over Older SystemsDocument9 paginiCommon Rail Fuel System: How It Works & Benefits Over Older SystemsMANOJÎncă nu există evaluări
- Fuel Injection SystemDocument9 paginiFuel Injection SystemJM PraveenÎncă nu există evaluări
- ME-Motronic System Controls Cylinder Charge and Fuel DeliveryDocument12 paginiME-Motronic System Controls Cylinder Charge and Fuel DeliveryKanagasundram JathursajanÎncă nu există evaluări
- MPFI Vs Carburetor Technology For Multi Cylinder EnginesDocument14 paginiMPFI Vs Carburetor Technology For Multi Cylinder EnginesDipak Kumar100% (1)
- Report-Multi Point Fuel Injection-MpfiDocument19 paginiReport-Multi Point Fuel Injection-MpfiHemant PatraÎncă nu există evaluări
- MPFI System ExplainedDocument15 paginiMPFI System Explainedಶಿವರಾಜ್ ಎನ್Încă nu există evaluări
- MPFI System: How It Works and Its ComponentsDocument6 paginiMPFI System: How It Works and Its Componentsalan kurniawanÎncă nu există evaluări
- FuelInjection SystemDocument24 paginiFuelInjection SystemCharlyn FloresÎncă nu există evaluări
- Everything You Need to Know About Fuel Injection SystemsDocument20 paginiEverything You Need to Know About Fuel Injection Systemsgelo an binbi nonÎncă nu există evaluări
- Engine Management MechatronicsDocument18 paginiEngine Management MechatronicsTanuj Kumar67% (3)
- Ic Engine AssignmentDocument7 paginiIc Engine AssignmentMuhammad Fahad Khan 51-FET/BSCMET/F19Încă nu există evaluări
- Everything You Need to Know About MPFI SystemsDocument16 paginiEverything You Need to Know About MPFI SystemsIshan Rastogi100% (4)
- Electronic Fuel Injection by Dr.S.John AlexisDocument32 paginiElectronic Fuel Injection by Dr.S.John AlexisJ Naveen KumarÎncă nu există evaluări
- Lect 1-Efi Petrol 3HRSDocument50 paginiLect 1-Efi Petrol 3HRSHodge LorneÎncă nu există evaluări
- OBD-InsightsDocument52 paginiOBD-Insightsjayasundar100% (1)
- Chapter - 1: Fig 1.1: Schematic Diagram of GDI EngineDocument39 paginiChapter - 1: Fig 1.1: Schematic Diagram of GDI EngineArun KpÎncă nu există evaluări
- ElectronicsDocument4 paginiElectronicsMarcusÎncă nu există evaluări
- Electronic Fuel Injection in VehiclesDocument38 paginiElectronic Fuel Injection in VehiclesKelvin WairiÎncă nu există evaluări
- AUTOTRONICADocument3 paginiAUTOTRONICAJhon Arreaga AguilarÎncă nu există evaluări
- Fuel Injection System Bosch AfcDocument28 paginiFuel Injection System Bosch AfcShivam TandonÎncă nu există evaluări
- Vehicle Electrical Actuators GuideDocument40 paginiVehicle Electrical Actuators GuideBence M Zoltan100% (1)
- 4-Cylinder Engine EMS ExplainedDocument27 pagini4-Cylinder Engine EMS ExplainedGabriel BalcazarÎncă nu există evaluări
- Mixture Preparation SIDocument42 paginiMixture Preparation SIMekonnen AyalÎncă nu există evaluări
- Electronic Fuel Injection System: Damian CastelinoDocument23 paginiElectronic Fuel Injection System: Damian CastelinoRamjiÎncă nu există evaluări
- ENGINE MANAGEMENT SYSTEM FOR GASOLINE ENGINESDocument18 paginiENGINE MANAGEMENT SYSTEM FOR GASOLINE ENGINESFady Aboukhatwa0% (1)
- 4.1 Engine Management System-R1-1 MINYI EFFADocument24 pagini4.1 Engine Management System-R1-1 MINYI EFFARusonegroÎncă nu există evaluări
- Electronic Fuel Management in I.C Engines G Nagarajan Professor Department of Mechanical Engg. Anna University Chennai 60025Document5 paginiElectronic Fuel Management in I.C Engines G Nagarajan Professor Department of Mechanical Engg. Anna University Chennai 60025alagarg137691Încă nu există evaluări
- AE&ES Lab Front Page Merged Pages 2 22Document4 paginiAE&ES Lab Front Page Merged Pages 2 22VIVEK KUMAR DASÎncă nu există evaluări
- MR SolomonDocument6 paginiMR SolomonMarcusÎncă nu există evaluări
- Lecture 3Document25 paginiLecture 3ShzllÎncă nu există evaluări
- Submitted by P.Nagaraju 160113735159: Electronic Fuel InjectorDocument20 paginiSubmitted by P.Nagaraju 160113735159: Electronic Fuel InjectorvamshiÎncă nu există evaluări
- FUEL SYSTEM OF C18 and C6.6Document135 paginiFUEL SYSTEM OF C18 and C6.6Sahr, Cyprian Fillie100% (2)
- Engine Control UnitDocument7 paginiEngine Control UnittotoÎncă nu există evaluări
- Basic Overview of Electronic Fuel InjectionDocument23 paginiBasic Overview of Electronic Fuel InjectionAndhieAbrahamÎncă nu există evaluări
- Bosch Motronic ME7.9.10Document32 paginiBosch Motronic ME7.9.10paulyvon.dicuÎncă nu există evaluări
- Engine Management: Subject: Mechatronics System Design Submitted To: Engr. Zubair Submitted byDocument6 paginiEngine Management: Subject: Mechatronics System Design Submitted To: Engr. Zubair Submitted byqazi_mohsin87100% (1)
- Exposicion Inyeccion ElectronicaDocument56 paginiExposicion Inyeccion ElectronicaPedro Emanuel Pineda PinedaÎncă nu există evaluări
- E - Theory/Operation - Efi: 1991 Mitsubishi MonteroDocument7 paginiE - Theory/Operation - Efi: 1991 Mitsubishi MonteroAnimemanuel MuñozÎncă nu există evaluări
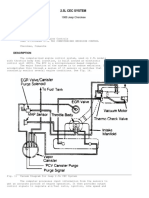
- 2.5l Cec SystemDocument37 pagini2.5l Cec Systemdaniel lacerdaÎncă nu există evaluări
- MPFI: Multi-Point Fuel Injection GuideDocument16 paginiMPFI: Multi-Point Fuel Injection GuideRITIK SHARMAÎncă nu există evaluări
- Diesel Engine ManagementDocument56 paginiDiesel Engine Managementbravo6dÎncă nu există evaluări
- 966 Fuel SystemDocument12 pagini966 Fuel SystemWalid HouranÎncă nu există evaluări
- Unit 2Document49 paginiUnit 2Ramanathan DuraiÎncă nu există evaluări
- An Overview of Electronic Fuel Injection System: S.K. Padmalingesh, S.R. Narun, V. AnnamalaiDocument8 paginiAn Overview of Electronic Fuel Injection System: S.K. Padmalingesh, S.R. Narun, V. AnnamalaiAsif AlamÎncă nu există evaluări
- Cummins ISX Fuel System 02-05Document18 paginiCummins ISX Fuel System 02-05g665013100% (21)
- Modern Automotive Technologies: UNIT-1 Advanced Engine ControlDocument9 paginiModern Automotive Technologies: UNIT-1 Advanced Engine ControlMd zakirÎncă nu există evaluări
- EM1 AssignmentDocument12 paginiEM1 AssignmentThe Three FattyÎncă nu există evaluări
- Seminar on Electronic Control Modules (ECMDocument13 paginiSeminar on Electronic Control Modules (ECMmedesign100% (1)
- Lecture-9-Electronic Engine Management SystemDocument102 paginiLecture-9-Electronic Engine Management SystemPiyush BidwaiÎncă nu există evaluări
- Unit Injectors: Unit Injector Hold-Down Clamp Rack Plunger Injector NozzleDocument14 paginiUnit Injectors: Unit Injector Hold-Down Clamp Rack Plunger Injector NozzleGovea HeduÎncă nu există evaluări
- AssignmentDocument5 paginiAssignmentSai DivakarÎncă nu există evaluări
- Automotive ElectronicsDocument44 paginiAutomotive ElectronicsRohit Kumar100% (1)
- Fuel Injection SystemDocument24 paginiFuel Injection SystemDevendra Pratap SinghÎncă nu există evaluări
- Weber Injection-Ignition SystemDocument27 paginiWeber Injection-Ignition SystemjohnvandurenÎncă nu există evaluări
- Diesel Common Rail Injection Electronic Components ExplainedDe la EverandDiesel Common Rail Injection Electronic Components ExplainedEvaluare: 3.5 din 5 stele3.5/5 (7)
- Control of DC Motor Using Different Control StrategiesDe la EverandControl of DC Motor Using Different Control StrategiesÎncă nu există evaluări
- FoxconnDocument2 paginiFoxconnArulmuruganÎncă nu există evaluări
- Not Filled ListDocument2 paginiNot Filled ListArulmuruganÎncă nu există evaluări
- Fe Reduction in Recycled Aluminium Through Filtration ProcessDocument1 paginăFe Reduction in Recycled Aluminium Through Filtration ProcessArulmuruganÎncă nu există evaluări
- Fees Circular-07032020144337Document2 paginiFees Circular-07032020144337ArulmuruganÎncă nu există evaluări
- Project Report Submission Cum Review CircularDocument2 paginiProject Report Submission Cum Review CircularArulmuruganÎncă nu există evaluări
- Synapse Robotics Requirements For 1 Month Design Engineer Interns - SRECDocument2 paginiSynapse Robotics Requirements For 1 Month Design Engineer Interns - SRECArulmuruganÎncă nu există evaluări
- UG Project BonafideDocument1 paginăUG Project BonafideArulmuruganÎncă nu există evaluări
- I Have Access To Download Books From ScribdDocument1 paginăI Have Access To Download Books From ScribdArulmuruganÎncă nu există evaluări
- 1986 by D. Reidel Publishing Company.: Jo NTDocument2 pagini1986 by D. Reidel Publishing Company.: Jo NTArulmuruganÎncă nu există evaluări
- Phone:-Director Office FAX WWW - Kerala.gov - in 0471-2305230 0471-2305193 0471-2301740Document2 paginiPhone:-Director Office FAX WWW - Kerala.gov - in 0471-2305230 0471-2305193 0471-2301740ArulmuruganÎncă nu există evaluări
- Thursday, September 18, 2008: Pacific Exchange Rate ServiceDocument1 paginăThursday, September 18, 2008: Pacific Exchange Rate ServiceArulmuruganÎncă nu există evaluări
- Average QuestionsDocument22 paginiAverage QuestionsAruna YadavÎncă nu există evaluări
- Module 1 Lesson 1Document11 paginiModule 1 Lesson 19703422499Încă nu există evaluări
- Strength of Materials Deformation Due To Axial Load Hani Aziz Ameen PDFDocument32 paginiStrength of Materials Deformation Due To Axial Load Hani Aziz Ameen PDFArulmuruganÎncă nu există evaluări
- I Have Access To Download Books From ScribdDocument1 paginăI Have Access To Download Books From ScribdArulmuruganÎncă nu există evaluări
- 1986 by D. Reidel Publishing Company.: Jo NTDocument2 pagini1986 by D. Reidel Publishing Company.: Jo NTArulmuruganÎncă nu există evaluări
- Me 2010Document16 paginiMe 2010ArulmuruganÎncă nu există evaluări
- I Have Access To Download Books From ScribdDocument1 paginăI Have Access To Download Books From ScribdArulmuruganÎncă nu există evaluări
- Fluid Mechanics Tutorial Questions on Flow through PipesDocument2 paginiFluid Mechanics Tutorial Questions on Flow through PipesArulmuruganÎncă nu există evaluări
- Fluid Mechanics Tutorial Questions on Flow through PipesDocument2 paginiFluid Mechanics Tutorial Questions on Flow through PipesArulmuruganÎncă nu există evaluări
- I Have Access To Download Books From ScribdDocument1 paginăI Have Access To Download Books From ScribdArulmuruganÎncă nu există evaluări
- I Have Access To Download Books From ScribdDocument1 paginăI Have Access To Download Books From ScribdArulmuruganÎncă nu există evaluări
- I Have Access To Download Books From ScribdDocument1 paginăI Have Access To Download Books From ScribdArulmuruganÎncă nu există evaluări
- I Have Access To Download Books From ScribdDocument1 paginăI Have Access To Download Books From ScribdArulmuruganÎncă nu există evaluări
- I Have Access To Download Books From ScribdDocument1 paginăI Have Access To Download Books From ScribdArulmuruganÎncă nu există evaluări
- I Have Access To Download Books From ScribdDocument1 paginăI Have Access To Download Books From ScribdArulmuruganÎncă nu există evaluări
- I Have Access To Download Books From ScribdDocument1 paginăI Have Access To Download Books From ScribdArulmuruganÎncă nu există evaluări
- Manual Mercedes W220Document416 paginiManual Mercedes W220Артур Острейко50% (2)
- A5 Octavia OwnersManualDocument230 paginiA5 Octavia OwnersManualHaris DedicÎncă nu există evaluări
- b5 45-06Document15 paginib5 45-06Tanee BoonmalertÎncă nu există evaluări
- VW Equipment Code ListDocument132 paginiVW Equipment Code Listricarsenio0% (1)
- Parts Catalog of XML6112J14 Euro 4 (Peru)Document176 paginiParts Catalog of XML6112J14 Euro 4 (Peru)Miguel CardenasÎncă nu există evaluări
- TigerTool V3.0 InstructionsDocument28 paginiTigerTool V3.0 Instructionslindkvist.andreasÎncă nu există evaluări
- Pin Assignment Pin Color Wire Size Option Function: Astra H - x48 - Under SeatDocument12 paginiPin Assignment Pin Color Wire Size Option Function: Astra H - x48 - Under SeatgerasimovruslanÎncă nu există evaluări
- Technical Specifications 2004 Audi A4 1.8T Sedan: EngineDocument28 paginiTechnical Specifications 2004 Audi A4 1.8T Sedan: EngineEsther KoltermanÎncă nu există evaluări
- Softail 2018 Service Manual Harley Davidson 94000529 OPTDocument1.988 paginiSoftail 2018 Service Manual Harley Davidson 94000529 OPTIván DesordenÎncă nu există evaluări
- Especificacion Chasis DieselDocument108 paginiEspecificacion Chasis Dieselluisvelandia1975Încă nu există evaluări
- Foton BrochureDocument2 paginiFoton BrochureAliÎncă nu există evaluări
- FPCDocument30 paginiFPCJohan RiemersmaÎncă nu există evaluări
- Katalog Alat Peraga TKRDocument18 paginiKatalog Alat Peraga TKRMkks SiplahÎncă nu există evaluări
- Honda CBR250 Price, Specs, Review, Pics & Mileage in India - Https - Autos - Maxabout.com - Bikes - Honda - cbr250rDocument11 paginiHonda CBR250 Price, Specs, Review, Pics & Mileage in India - Https - Autos - Maxabout.com - Bikes - Honda - cbr250rArul Gnana JohnÎncă nu există evaluări
- Brochure Peugeot 3008Document13 paginiBrochure Peugeot 3008pasistÎncă nu există evaluări
- Celerio CatalogueDocument10 paginiCelerio CatalogueRehab Taha HelalÎncă nu există evaluări
- Difference Between Toyota Hilux Vigo G and Toyota Hilux Vigo eDocument37 paginiDifference Between Toyota Hilux Vigo G and Toyota Hilux Vigo eDavide Boreaneze100% (1)
- Xmq6117y3 Operation Manual - Philippines 4 2014 Eb100072 81Document144 paginiXmq6117y3 Operation Manual - Philippines 4 2014 Eb100072 81papagunzÎncă nu există evaluări
- Automotive Electronics ECU Design and DiagnosticsDocument50 paginiAutomotive Electronics ECU Design and DiagnosticsleninkishgmailcomÎncă nu există evaluări
- Honda Cb1000r Ra Owners Manual 107551Document160 paginiHonda Cb1000r Ra Owners Manual 107551Razvan Grecu100% (1)
- Aen MicroprojectDocument12 paginiAen MicroprojectArvind YadavÎncă nu există evaluări
- Emc 0200000001Document68 paginiEmc 0200000001Gurmi100Încă nu există evaluări
- Superb BrochureDocument10 paginiSuperb BrochuregoaltechÎncă nu există evaluări
- 2012 GMC Acadia OwnersDocument456 pagini2012 GMC Acadia OwnersarstjunkÎncă nu există evaluări
- KTM Duke 790Document290 paginiKTM Duke 790David Francisco Benites MillanÎncă nu există evaluări
- Tiago-AMT-OMSB Rev03 03.01.18Document156 paginiTiago-AMT-OMSB Rev03 03.01.18jotowekidÎncă nu există evaluări
- Suzuki Jimny 2015 UKDocument20 paginiSuzuki Jimny 2015 UKJhonathan BaptistaÎncă nu există evaluări
- Hino Diesel Trucks 1998-2004 Quick Referance Parts CatalogDocument70 paginiHino Diesel Trucks 1998-2004 Quick Referance Parts CatalogVerónica Maila FigueroaÎncă nu există evaluări
- Brake SystemsDocument82 paginiBrake SystemsRoman NevaznoÎncă nu există evaluări
- Catalogo Haldex EuropaDocument226 paginiCatalogo Haldex EuropaJas SumÎncă nu există evaluări