Documente Academic
Documente Profesional
Documente Cultură
Mecanismo 4 Barras Cinematica PDF
Încărcat de
luiscorpionsTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Mecanismo 4 Barras Cinematica PDF
Încărcat de
luiscorpionsDrepturi de autor:
Formate disponibile
See discussions, stats, and author profiles for this publication at: https://www.researchgate.
net/publication/327832989
Análisis de posición, velocidad y aceleración de mecanismos de 4 barras por
métodos analíticos y numéricos
Preprint · September 2017
DOI: 10.13140/RG.2.2.16099.81444
CITATIONS READS
0 3,848
1 author:
Carlos Armando De Castro
CIMNAD
12 PUBLICATIONS 3 CITATIONS
SEE PROFILE
Some of the authors of this publication are also working on these related projects:
Solar dryers study View project
COVID-19 spread View project
All content following this page was uploaded by Carlos Armando De Castro on 23 September 2018.
The user has requested enhancement of the downloaded file.
Análisis de posición, velocidad y aceleración mecanismos 4 barras – Carlos Armando De Castro
ANÁLISIS DE POSICIÓN, VELOCIDAD Y ACELERACIÓN DE MECANISMOS DE 4
BARRAS POR MÉTODOS ANALÍTICOS - NUMÉRICOS
Carlos Armando De Castro
Asesorías en Matemáticas, Física e Ingeniería
1. INTRODUCCIÓN
En éste escrito se muestra el análisis cinemático general de un mecanismo de 4 barras por
métodos analíticos – numéricos, implementados en Excel para entregar las soluciones. El
esquema generalizado de un mecanismo de 4 barras es el siguiente:
Figura 1.1. Mecanismo de 4 barras generalizado.
Todos los ángulos son medidos desde el eje x (horizontal), el eslabón impulsor (de entrada) es
el eslabón 2 que parte del pivote (o apoyo) O1. El ángulo 𝛽 que da la posición del punto de salida
P es constante ya que el elemento acoplador APB no cambia de forma en ninguna parte del
movimiento [1].
2. ANÁLISIS DE POSICIÓN
El análisis de posición es utilizado para que con un ángulo de entrada 𝜃2 y conociendo las
coordenadas de los apoyos y las longitudes de los eslabones se puedan establecer los demás
ángulos 𝜃3 , 𝜃4 y por lo tanto la posición del punto P de salida del mecanismo. Si bien éste
análisis puede hacerse de forma gráfica rápidamente para una posición particular se requiere
repetir varias veces el mismo proceso para analizar diversas posiciones del mecanismo [1].
Asesorías en Matemáticas, Física e Ingeniería
Whatsapp/Celular: 312-636-9880
Correo: asesormating@gmail.com
https://sites.google.com/site/matematicasingenieria
1
Análisis de posición, velocidad y aceleración mecanismos 4 barras – Carlos Armando De Castro
Para analizar la posición analíticamente se pone cada eslabón como un vector [1], según el
esquema mostrado:
Figura 2.1. Eslabones del mecanismo como vectores.
Cada uno de los vectores detallado por componentes es:
𝐫1 = (𝑂2𝑥 , 𝑂2𝑦 )
𝐫2 = (𝐿2 cos 𝜃2 , 𝐿2 sin 𝜃2 )
𝐫3 = (𝐿3 cos 𝜃3 , 𝐿3 sin 𝜃3 )
𝐫4 = (𝐿4 cos 𝜃4 , 𝐿4 sin 𝜃4 )
𝐫𝐴𝑃 = (𝑍1 cos(𝜃3 + 𝛽) , 𝑍1 sin(𝜃3 + 𝛽))
(1)
Del álgebra de vectores tenemos que se cumple para el esquema mostrado en la Fig. 2.1 el
siguiente lazo vectorial:
𝐫2 + 𝐫3 = 𝐫1 + 𝐫4
(2)
Igualando por componentes se tiene el sistema de ecuaciones:
𝐿2 cos 𝜃2 + 𝐿3 cos 𝜃3 = 𝑂2𝑥 + 𝐿4 cos 𝜃4
{ 𝐿 sin 𝜃 + 𝐿 sin 𝜃 = 𝑂 + 𝐿 sin 𝜃
2 2 3 3 2𝑦 4 4
(3)
Asesorías en Matemáticas, Física e Ingeniería
Whatsapp/Celular: 312-636-9880
Correo: asesormating@gmail.com
https://sites.google.com/site/matematicasingenieria
2
Análisis de posición, velocidad y aceleración mecanismos 4 barras – Carlos Armando De Castro
Las incógnitas son los ángulos 𝜃3 , 𝜃4 y despejarlos analíticamente de ésas ecuaciones es una
tarea engorrosa, por tanto se hace de forma iterativa; asumiendo inicialmente un valor para 𝜃3
se tiene del sistema de ecuaciones (3):
𝐿2 sin 𝜃2 + 𝐿3 sin 𝜃3 − 𝑂2𝑦
𝜃4 = arctan ( )
𝐿2 cos 𝜃2 + 𝐿3 cos 𝜃3 − 𝑂2𝑥
(4)
Con éste valor calculado de 𝜃4 se despeja y se calcula 𝜃3 del sistema de ecuaciones (3):
𝑂2𝑦 − 𝐿2 sin 𝜃2 + 𝐿4 sin 𝜃4
𝜃3 = arctan ( )
𝑂2𝑥 − 𝐿2 cos 𝜃2 + 𝐿4 cos 𝜃4
(5)
Se itera con las ecuaciones (4) y (5) hasta alcanzar convergencia del método; éste es el método
numérico de punto fijo multivariable [2]. Una vez calculados los ángulos se calcula la posición
del punto P de salida:
𝐫𝑃 = 𝐫2 + 𝐫𝐴𝑃 (6)
Detallando componentes:
𝑃𝑥 = 𝐿2 cos 𝜃2 + 𝑍1 cos(𝜃3 + 𝛽)
𝑃𝑦 = 𝐿2 sin 𝜃2 + 𝑍1 sin(𝜃3 + 𝛽)
(7)
Ejemplo 2.1. Considere un mecanismo de 4 barras con las siguientes medidas:
Coordenadas apoyo 2
O2x [mm] -350
O2y [mm] 0
Longitudes eslabones
L2 [mm] 700
L3 [mm] 300
L4 [mm] 500
Acoplador
Z1 [mm] 200
β [grados] 30
Asesorías en Matemáticas, Física e Ingeniería
Whatsapp/Celular: 312-636-9880
Correo: asesormating@gmail.com
https://sites.google.com/site/matematicasingenieria
3
Análisis de posición, velocidad y aceleración mecanismos 4 barras – Carlos Armando De Castro
Implementando el esquema iterativo mostrado con las ecuaciones (4) y (5) y la posición de P
con las ecuaciones (7) se tiene la solución a diversas posiciones del eslabón de entrada
implementadas en una hoja de cálculo de Excel:
θ3 θ4
Ángulos eslabón entrada [grados] [grados] Px [mm] Py [mm]
θ2 pos 1 [grados] 90,0 258,9 54,2 64,9 510,8
θ2 pos 2 [grados] 120,0 -34,8 60,5 -285,1 417,0
θ2 pos 3 [grados] 150,0 30,0 89,6 -541,3 160,8
θ2 pos 4 [grados] 180,0 100,3 143,8 -635,1 -189,2
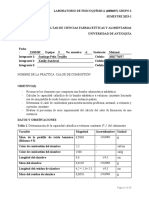
Las posiciones del mecanismo se muestran a continuación:
800
700
600
500
400
300
200
100
0
-800 -700 -600 -500 -400 -300 -200 -100 0 100 200
-100
-200
Figura 2.2. Diversas posiciones del mecanismo del Ejemplo 2.1, mostrando la configuración
de los eslabones y el trazado de la trayectoria del punto P de salida.
Asesorías en Matemáticas, Física e Ingeniería
Whatsapp/Celular: 312-636-9880
Correo: asesormating@gmail.com
https://sites.google.com/site/matematicasingenieria
4
Análisis de posición, velocidad y aceleración mecanismos 4 barras – Carlos Armando De Castro
Ejemplo 2.2. Considere un mecanismo de 4 barras con las siguientes medidas:
Coordenadas apoyo 2
O2x [mm] 1000
O2y [mm] 0
Longitudes eslabones
L2 [mm] 500
L3 [mm] 1000
L4 [mm] 500
Acoplador
Z1 [mm] 200
β [grados] 30
La solución a diversas posiciones es:
Ángulos eslabón entrada θ3 [grados] θ4 [grados] Px [mm] Py [mm]
θ2 pos 1 [grados] 0,0 0,0 0,0 673,2 100,0
θ2 pos 2 [grados] 30,0 0,0 30,0 606,2 350,0
θ2 pos 3 [grados] 90,0 0,0 90,0 173,2 600,0
θ2 pos 4 [grados] 150,0 0,0 150,0 -259,8 350,0
Las posiciones del mecanismo se muestran a continuación:
600
500
400
300
200
100
0
-500-400-300-200-100 0 100 200 300 400 500 600 700 800 900100011001200130014001500
Figura 2.3. Diversas posiciones del mecanismo del Ejemplo 2.2, mostrando la configuración
de los eslabones y el trazado de la trayectoria del punto P de salida. Éste es un mecanismo
para elevar y bajar cargas sin variar la horizontalidad de la misma.
Asesorías en Matemáticas, Física e Ingeniería
Whatsapp/Celular: 312-636-9880
Correo: asesormating@gmail.com
https://sites.google.com/site/matematicasingenieria
5
Análisis de posición, velocidad y aceleración mecanismos 4 barras – Carlos Armando De Castro
3. ANÁLISIS DE VELOCIDAD
Para el análisis de velocidad se utiliza el método vectorial de velocidades relativas [3]. La
entrada en éste caso es la velocidad angular del eslabón 2, entonces para el punto A se tiene:
𝑖 𝑗 𝑘
𝐯𝐴 = 𝛚2 × 𝐫2 = | 0 0 𝜔2 |
𝐿2 cos 𝜃2 𝐿2 sin 𝜃2 0
𝐯𝐴 = (−𝜔2 𝐿2 sin 𝜃2 , 𝜔2 𝐿2 cos 𝜃2 )
(8)
Mirando la velocidad del punto B por el eslabón 4 se tiene:
𝑖 𝑗 𝑘
𝐯𝐵 = 𝛚4 × 𝐫4 = | 0 0 𝜔4 |
𝐿4 cos 𝜃4 𝐿4 sin 𝜃4 0
𝐯𝐵 = (−𝜔4 𝐿4 sin 𝜃4 , 𝜔4 𝐿4 cos 𝜃4 )
(9)
Mirando la velocidad del punto B por el eslabón 3 se tiene:
𝑖 𝑗 𝑘
𝐯𝐵 = 𝐯𝐴 + 𝛚3 × 𝐫3 = (𝑣𝐴𝑥 , 𝑣𝐴𝑦 ) + | 0 0 𝜔3 |
𝐿3 cos 𝜃3 𝐿3 sin 𝜃3 0
𝐯𝐵 = (𝑣𝐴𝑥 − 𝜔3 𝐿3 sin 𝜃3 , 𝑣𝐴𝑦 + 𝜔3 𝐿3 cos 𝜃3 )
(10)
Donde 𝑣𝐴𝑥 y 𝑣𝐴𝑦 son las componentes de la velocidad del punto A dados por la ecuación (8).
Igualando por componentes las ecuaciones (9) y (10) se tiene el sistema de ecuaciones:
−𝜔4 𝐿4 sin 𝜃4 = 𝑣𝐴𝑥 − 𝜔3 𝐿3 sin 𝜃3
{ 𝜔 𝐿 cos 𝜃 = 𝑣 + 𝜔 𝐿 cos 𝜃
4 4 4 𝐴𝑦 3 3 3
(11)
Las incógnitas son las velocidades angulares de los eslabones 3 y 4; en forma matricial:
𝐿3 sin 𝜃3 −𝐿4 sin 𝜃4 𝜔3 𝑣𝐴𝑥
( ) (𝜔 ) = (𝑣 )
−𝐿3 cos 𝜃3 𝐿4 cos 𝜃4 4 𝐴𝑦
(12)
Asesorías en Matemáticas, Física e Ingeniería
Whatsapp/Celular: 312-636-9880
Correo: asesormating@gmail.com
https://sites.google.com/site/matematicasingenieria
6
Análisis de posición, velocidad y aceleración mecanismos 4 barras – Carlos Armando De Castro
Éste sistema se resuelve de forma rápida utilizando la regla de Cramer [4]:
𝑣𝐴𝑥 −𝐿4 sin 𝜃4 𝐿3 sin 𝜃3 𝑣𝐴𝑥
|𝑣 𝐿4 cos 𝜃4 | |−𝐿 cos 𝜃 𝑣 |
𝐴𝑦 3 3 𝐴𝑦
𝜔3 = , 𝜔4 =
𝐿3 sin 𝜃3 −𝐿4 sin 𝜃4 𝐿 sin 𝜃3 −𝐿4 sin 𝜃4
| | | 3 |
−𝐿3 cos 𝜃3 𝐿4 cos 𝜃4 −𝐿3 cos 𝜃3 𝐿4 cos 𝜃4
Desarrollando los determinantes y simplificando se tiene:
𝑣𝐴𝑥 cos 𝜃4 + 𝑣𝐴𝑦 sin 𝜃4
𝜔3 = (13)
𝐿3 sin(𝜃3 − 𝜃4 )
𝑣𝐴𝑥 cos 𝜃3 + 𝑣𝐴𝑦 sin 𝜃3
𝜔4 = (14)
𝐿4 sin(𝜃3 − 𝜃4 )
Con las velocidades angulares se puede calcular la velocidad del punto B con la ecuación (9) y
la velocidad del punto P es:
𝑖 𝑗 𝑘
𝐯𝑃 = 𝐯𝐴 + 𝛚3 × 𝐫𝐴𝑃 = (𝑣𝐴𝑥 , 𝑣𝐴𝑦 ) + | 0 0 𝜔 3|
𝑍1 cos(𝜃3 + 𝛽) 𝑍1 sin(𝜃3 + 𝛽) 0
𝐯𝑃 = (𝑣𝐴𝑥 − 𝜔3 𝑍1 sin(𝜃3 + 𝛽) , 𝑣𝐴𝑦 + 𝜔3 𝑍1 cos(𝜃3 + 𝛽))
(15)
Ejemplo 3.1. Considere el mecanismo del Ejemplo 2.1, con velocidad angular y posición
siguientes:
Datos entrada
θ2 [grados] 120,0
ω2 [rad/s] 5,00
Soluciones:
Vel. Angulares
ω3 [rad/s] 10,10
ω4 [rad/s] 2,99
Velocidades
Punto A
v_Ax [m/s] -3,03
v_Ay [m/s] -1,75
Punto B
v_Bx [m/s] -1,30
v_By [m/s] 0,74
Asesorías en Matemáticas, Física e Ingeniería
Whatsapp/Celular: 312-636-9880
Correo: asesormating@gmail.com
https://sites.google.com/site/matematicasingenieria
7
Análisis de posición, velocidad y aceleración mecanismos 4 barras – Carlos Armando De Castro
Punto P
v_Px [m/s] -2,86
v_Py [m/s] 0,26
Las gráficas en ese instante de la posición y velocidades de los puntos son:
Posición del mecanismo
700
600
500
400
y
300
200
100
0
-400 -300 -200 -100 0
x
Figura 3.1. Posición del mecanismo en el instante analizado.
1000
500
0
-4000 -3000 -2000 -1000 0
Vy [mm/s]
Vel. A
-500
Vel. B
-1000 Vel. P
-1500
-2000
Vx [mm/s]
Figura 3.2. Vectores de velocidad puntos A, B y P en el instante analizado.
Asesorías en Matemáticas, Física e Ingeniería
Whatsapp/Celular: 312-636-9880
Correo: asesormating@gmail.com
https://sites.google.com/site/matematicasingenieria
8
Análisis de posición, velocidad y aceleración mecanismos 4 barras – Carlos Armando De Castro
Ejemplo 3.2. Considere el mecanismo del Ejemplo 2.2, con velocidad angular y posición
siguientes:
Datos entrada
θ2 [grados] 60,0
ω2 [rad/s] 5,00
Soluciones:
Vel. Angulares
ω3 [rad/s] 0,00
ω4 [rad/s] 5,00
Velocidades
Punto A
v_Ax [m/s] -2,17
v_Ay [m/s] 1,25
Punto B
v_Bx [m/s] -2,17
v_By [m/s] 1,25
Punto P
v_Px [m/s] -2,17
v_Py [m/s] 1,25
Las gráficas en ese instante de la posición y velocidades de los puntos son:
Posición del mecanismo
600
500
400
300
y
200
100
0
0 500 1000 1500
x
Figura 3.3. Posición del mecanismo en el instante analizado.
Asesorías en Matemáticas, Física e Ingeniería
Whatsapp/Celular: 312-636-9880
Correo: asesormating@gmail.com
https://sites.google.com/site/matematicasingenieria
9
Análisis de posición, velocidad y aceleración mecanismos 4 barras – Carlos Armando De Castro
1400
1200
1000
Vy [mm/s] 800
Vel. A
600
Vel. B
400 Vel. P
200
0
-2500 -2000 -1500 -1000 -500 0
Vx [mm/s]
Figura 3.4. Vectores de velocidad puntos A, B y P en el instante analizado.
Observación importante: en todo el análisis de velocidad se ha asumido que los ángulos de
todos los eslabones son conocidos, esto se logra por medio de un análisis de posición por lo
que es claro entonces que para hacer un análisis de velocidad hay que haber hecho de
antemano el análisis de posición.
Observación adicional: para el análisis de aceleración (próximo a verse) debe ya haberse
hecho el análisis de velocidad.
4. ANÁLISIS DE ACELERACIÓN
Para el análisis de aceleración se utiliza el método vectorial de aceleraciones relativas [3]. La
entrada en éste caso es la aceleración angular del eslabón 2 y las velocidades ya conocidas del
mecanismo calculadas por medio del análisis de velocidades, entonces para el punto A se tiene:
𝑖 𝑗 𝑘 𝑖 𝑗 𝑘
𝐚𝐴 = 𝛂2 × 𝐫2 + 𝛚2 × 𝐯𝐴 = | 0 0 𝛼2 | + | 0 0 𝜔2 |
𝐿2 cos 𝜃2 𝐿2 sin 𝜃2 0 𝑣𝐴𝑥 𝑣𝐴𝑦 0
𝐚𝐴 = (−𝛼2 𝐿2 sin 𝜃2 − 𝜔2 𝑣𝐴𝑦 , 𝛼2 𝐿2 cos 𝜃2 + 𝜔2 𝑣𝐴𝑥 )
(16)
Asesorías en Matemáticas, Física e Ingeniería
Whatsapp/Celular: 312-636-9880
Correo: asesormating@gmail.com
https://sites.google.com/site/matematicasingenieria
10
Análisis de posición, velocidad y aceleración mecanismos 4 barras – Carlos Armando De Castro
Mirando la aceleración del punto B por el eslabón 4 se tiene:
𝑖 𝑗 𝑘 𝑖 𝑗 𝑘
𝐚𝐵 = 𝛂4 × 𝐫4 + 𝛚4 × 𝐯𝐵 = | 0 0 𝛼4 | + | 0 0 𝜔4 |
𝐿4 cos 𝜃4 𝐿4 sin 𝜃4 0 𝑣𝐵𝑥 𝑣𝐵𝑦 0
𝐚𝐵 = (−𝛼4 𝐿4 sin 𝜃4 − 𝜔4 𝑣𝐵𝑦 , 𝛼4 𝐿4 cos 𝜃4 + 𝜔4 𝑣𝐵𝑥 )
(17)
Mirando la aceleración del punto B por el eslabón 3 se tiene:
𝐚𝐵 = 𝐚𝐴 + 𝛂3 × 𝐫3 + 𝛚3 × (𝐯𝐵 − 𝐯𝐴 )
𝑖 𝑗 𝑘 𝑖 𝑗 𝑘
𝐚𝐵 = (𝑎𝐴𝑥 , 𝑎𝐴𝑦 ) + | 0 0 𝛼3 | + | 0 0 𝜔3 |
𝐿3 cos 𝜃3 𝐿3 sin 𝜃3 0 𝑣𝐵𝑥 − 𝑣𝐴𝑥 𝑣𝐵𝑦 − 𝑣𝐴𝑦 0
𝐚𝐵 = (𝑎𝐴𝑥 − 𝛼3 𝐿3 sin 𝜃3 − 𝜔3 (𝑣𝐵𝑦 − 𝑣𝐴𝑦 ) , 𝑎𝐴𝑦 + 𝛼3 𝐿3 cos 𝜃3 + 𝜔3 (𝑣𝐵𝑥 − 𝑣𝐴𝑥 ))
(18)
Donde 𝑎𝐴𝑥 y 𝑎𝐴𝑦 son las componentes de la aceleración del punto A dados por la ecuación (16).
Igualando por componentes las ecuaciones (17) y (18) se tiene el sistema de ecuaciones:
−𝛼4 𝐿4 sin 𝜃4 − 𝜔4 𝑣𝐵𝑦 = 𝑎𝐴𝑥 − 𝛼3 𝐿3 sin 𝜃3 − 𝜔3 (𝑣𝐵𝑦 − 𝑣𝐴𝑦 )
{
𝛼4 𝐿4 cos 𝜃4 + 𝜔4 𝑣𝐵𝑥 = 𝑎𝐴𝑦 + 𝛼3 𝐿3 cos 𝜃3 + 𝜔3 (𝑣𝐵𝑥 − 𝑣𝐴𝑥 )
(19)
Las incógnitas son las aceleraciones angulares de los eslabones 3 y 4; en forma matricial:
𝐿 sin 𝜃3 −𝐿4 sin 𝜃4 𝛼3 𝑎𝐴𝑥 − 𝜔3 (𝑣𝐵𝑦 − 𝑣𝐴𝑦 ) + 𝜔4 𝑣𝐵𝑦
( 3 ) (𝛼 ) = ( )
−𝐿3 cos 𝜃3 𝐿4 cos 𝜃4 4 𝑎𝐴𝑦 + 𝜔3 (𝑣𝐵𝑥 − 𝑣𝐴𝑥 ) − 𝜔4 𝑣𝐵𝑥
(20)
Para simplificar se definen:
𝑎1 = 𝑎𝐴𝑥 − 𝜔3 (𝑣𝐵𝑦 − 𝑣𝐴𝑦 ) + 𝜔4 𝑣𝐵𝑦
𝑎2 = 𝑎𝐴𝑦 + 𝜔3 (𝑣𝐵𝑥 − 𝑣𝐴𝑥 ) − 𝜔4 𝑣𝐵𝑥
(21)
Entonces la solución por regla de Cramer [4] del sistema (20) es:
Asesorías en Matemáticas, Física e Ingeniería
Whatsapp/Celular: 312-636-9880
Correo: asesormating@gmail.com
https://sites.google.com/site/matematicasingenieria
11
Análisis de posición, velocidad y aceleración mecanismos 4 barras – Carlos Armando De Castro
𝑎1 −𝐿4 sin 𝜃4 𝐿 sin 𝜃3 𝑎1
| | | 3 |
𝑎2 𝐿4 cos 𝜃4 −𝐿3 cos 𝜃3 𝑎2
𝛼3 = , 𝛼4 =
𝐿 sin 𝜃3 −𝐿4 sin 𝜃4 𝐿 sin 𝜃3 −𝐿4 sin 𝜃4
| 3 | | 3 |
−𝐿3 cos 𝜃3 𝐿4 cos 𝜃4 −𝐿3 cos 𝜃3 𝐿4 cos 𝜃4
Desarrollando los determinantes y simplificando se tiene:
𝑎1 cos 𝜃4 + 𝑎2 sin 𝜃4
𝛼3 = (22)
𝐿3 sin(𝜃3 − 𝜃4 )
𝑎1 cos 𝜃3 + 𝑎2 sin 𝜃3
𝛼4 = (23)
𝐿4 sin(𝜃3 − 𝜃4 )
Con las aceleraciones angulares se puede calcular la aceleración del punto B con la ecuación
(17) y la aceleración del punto P es:
𝐚𝑃 = 𝐚𝐴 + 𝛂3 × 𝐫𝐴𝑃 + 𝛚3 × (𝐯𝑃 − 𝐯𝐴 )
𝑖 𝑗 𝑘 𝑖 𝑗 𝑘
𝐚𝑃 = (𝑎𝐴𝑥 , 𝑎𝐴𝑦 ) + | 0 0 𝛼3 | + | 0 0 𝜔3 |
𝑍1 cos(𝜃3 + 𝛽) 𝑍1 sin(𝜃3 + 𝛽) 0 𝑣𝑃𝑥 − 𝑣𝑃𝑥 𝑣𝑃𝑦 − 𝑣𝐴𝑦 0
𝐚𝑃 = (𝑎𝐴𝑥 − 𝛼3 𝑍1 sin(𝜃3 + 𝛽) − 𝜔3 (𝑣𝑃𝑦 − 𝑣𝐴𝑦 ), 𝑎𝐴𝑦 + 𝛼3 𝑍1 cos(𝜃3 + 𝛽) + 𝜔3 (𝑣𝑃𝑥 − 𝑣𝐴𝑥 ))
(24)
Ejemplo 4.1. Considere el mecanismo de los ejemplos 2.1 y 3.1 con 𝛼2 = 0, se tiene:
Acel. Angulares
α3 [rad/s2] 5,31
α4 [rad/s2] 30,46
Aceleraciones
Punto A
a_Ax [m/s2] 8,8
a_Ay [m/s2] -15,2
Punto B
a_Bx [m/s2] -15,5
a_By [m/s2] 3,6
Punto P
a_Px [m/s2] -11,5
a_Py [m/s2] -12,4
Asesorías en Matemáticas, Física e Ingeniería
Whatsapp/Celular: 312-636-9880
Correo: asesormating@gmail.com
https://sites.google.com/site/matematicasingenieria
12
Análisis de posición, velocidad y aceleración mecanismos 4 barras – Carlos Armando De Castro
5000
0
-20000 -10000 0 10000
Ay [mm/s2]
-5000
Acel. A
Acel. B
-10000
Acel. P
-15000
-20000
Ax [mm/s2]
Figura 4.1. Vectores de aceleración puntos A, B y P en el instante analizado.
Ejemplo 4.2. Considere el mecanismo de los ejemplos 2.2 y 3.2 con 𝛼2 = 0, se tiene:
Acel. Angulares
α3 [rad/s2] 0,00
α4 [rad/s2] 0,00
Aceleraciones
Punto A
a_Ax [m/s2] -6,3
a_Ay [m/s2] -10,8
Punto B
a_Bx [m/s2] -6,3
a_By [m/s2] -10,8
Punto P
a_Px [m/s2] -6,3
a_Py [m/s2] -10,8
Asesorías en Matemáticas, Física e Ingeniería
Whatsapp/Celular: 312-636-9880
Correo: asesormating@gmail.com
https://sites.google.com/site/matematicasingenieria
13
Análisis de posición, velocidad y aceleración mecanismos 4 barras – Carlos Armando De Castro
0
-8000 -6000 -4000 -2000 0
-2000
-4000
Ay [mm/s2]
Acel. A
-6000
Acel. B
Acel. P
-8000
-10000
-12000
Ax [mm/s2]
Figura 4.2. Vectores de aceleración puntos A, B y P en el instante analizado.
BIBLIOGRAFÍA:
[1] Robert L. Norton. Dinámica de maquinaria. McGraw Hill.
[2] Carlos Armando De Castro. Métodos numéricos básicos para ingeniería.
https://sites.google.com/site/matematicasingenieria/metodos_numericos_ingenieria
[3] Andrew Pytel, Jaan Kiusalaas. Ingeniería Mecánica: Dinámica. Cengage Learning.
[4] Tom Apostol. Calculus. 2ª edición. Ed. Reverté.
¿Desea más profundización y ejemplos prácticos?
Contáctenos para una clase personalizada.
Asesorías en Matemáticas, Física e Ingeniería
Whatsapp/Celular: 312-636-9880
Correo: asesormating@gmail.com
https://sites.google.com/site/matematicasingenieria
14
View publication stats
S-ar putea să vă placă și
- Sgi-Itm-Ac-Po-007-01 Solicitud ResidenciasDocument3 paginiSgi-Itm-Ac-Po-007-01 Solicitud ResidenciasluiscorpionsÎncă nu există evaluări
- Sgi-Itm-Ac-Po-007-02 Asignacion AsesorDocument2 paginiSgi-Itm-Ac-Po-007-02 Asignacion AsesorluiscorpionsÎncă nu există evaluări
- Sgi-Itm-Ac-Po-007-03 Carta de PresentaciónDocument2 paginiSgi-Itm-Ac-Po-007-03 Carta de PresentaciónluiscorpionsÎncă nu există evaluări
- Sgi-Itm-Ac-Po-007-08formato de Reporte Preliminar de Residencias ProfesionalesDocument7 paginiSgi-Itm-Ac-Po-007-08formato de Reporte Preliminar de Residencias ProfesionalesluiscorpionsÎncă nu există evaluări
- Instituto Tecnologico de MatamorosDocument1 paginăInstituto Tecnologico de MatamorosluiscorpionsÎncă nu există evaluări
- Hoja de PresentacionDocument1 paginăHoja de PresentacionluiscorpionsÎncă nu există evaluări
- Potada para Residencia Con Logo NuevoDocument2 paginiPotada para Residencia Con Logo NuevoluiscorpionsÎncă nu există evaluări
- Formato de Residencia ActualizadoDocument3 paginiFormato de Residencia ActualizadoluiscorpionsÎncă nu există evaluări
- Informe Calor de CombustiónDocument11 paginiInforme Calor de CombustiónSantiagoÎncă nu există evaluări
- Práctica Física II, Pt. 1Document5 paginiPráctica Física II, Pt. 1Anthony RomanoÎncă nu există evaluări
- Guia 5 Circuitos EléctricosDocument10 paginiGuia 5 Circuitos EléctricosMACARENA DIAZ LATRACHÎncă nu există evaluări
- Mapa Conceptual Unidad 2Document1 paginăMapa Conceptual Unidad 2Fernando MontalvanÎncă nu există evaluări
- Experiencia 3 MRUADocument9 paginiExperiencia 3 MRUALeslie SanchezÎncă nu există evaluări
- L7 Reactancia PotierDocument6 paginiL7 Reactancia PotierMelissa ZepitaÎncă nu există evaluări
- Historia de La Ingenieria AntisismicaDocument11 paginiHistoria de La Ingenieria AntisismicaLuis Armando Cuzco Trigozo100% (1)
- APLICASIONDocument13 paginiAPLICASIONFJXGCHKBHIÑÎncă nu există evaluări
- Educación Física Preescolar 2013-2014Document4 paginiEducación Física Preescolar 2013-2014Carlos ArguellesÎncă nu există evaluări
- 1.2. - Tipos de EnergíaDocument7 pagini1.2. - Tipos de EnergíaOctavio SanchezÎncă nu există evaluări
- FísicaDocument35 paginiFísicagatito99Încă nu există evaluări
- Recipientes Esfericos.Document11 paginiRecipientes Esfericos.hebert_huertoÎncă nu există evaluări
- Jorge Mahecha-Mecanica Clasica Avanzada-Editorial Universidad de Antioquia (2006)Document620 paginiJorge Mahecha-Mecanica Clasica Avanzada-Editorial Universidad de Antioquia (2006)fmillananjari100% (5)
- Ejercicio 1 - Sistema de TuberíasDocument9 paginiEjercicio 1 - Sistema de Tuberías//Jetary//Încă nu există evaluări
- Trabajo Final de Investigacion Fisica UCVDocument12 paginiTrabajo Final de Investigacion Fisica UCVKaren Santos100% (1)
- Fisica 1Document7 paginiFisica 1Paul AlexanderÎncă nu există evaluări
- Tema 02-Est Particula 20-21Document19 paginiTema 02-Est Particula 20-21Todo SpamÎncă nu există evaluări
- 37 Reservorio Apoyado 10 m3 - CalculoDocument30 pagini37 Reservorio Apoyado 10 m3 - CalculoandreacorazonÎncă nu există evaluări
- Taller Fisica AcusticaDocument4 paginiTaller Fisica AcusticaRizo Noriega Laura SofiaÎncă nu există evaluări
- 2013 Leading Knowledge Esp Seg WebDocument47 pagini2013 Leading Knowledge Esp Seg WebainogÎncă nu există evaluări
- Péndulo ElectrostaticoDocument4 paginiPéndulo ElectrostaticoSamuelÎncă nu există evaluări
- Primer Taller Fisica III. 2°semestre 2012 PDFDocument5 paginiPrimer Taller Fisica III. 2°semestre 2012 PDFcamfersalÎncă nu există evaluări
- Informe Resistencia de MaterialesDocument12 paginiInforme Resistencia de Materialesroberto carlos vargas villarroel100% (2)
- Teoria General de SistemasDocument10 paginiTeoria General de SistemasHernandinho Vargas RojasÎncă nu există evaluări
- Ejercicios FenómenosDocument3 paginiEjercicios Fenómenoscesar_t_285% (13)
- MS002-0000-ME-CTR-201 - R0 - Criterio de DiseñoDocument14 paginiMS002-0000-ME-CTR-201 - R0 - Criterio de DiseñoJaime Muñoz SaezÎncă nu există evaluări
- Densidad y Peso Molecular AparenteDocument9 paginiDensidad y Peso Molecular AparenteRios Rios100% (2)
- Teoria Atomica de BohrDocument10 paginiTeoria Atomica de BohrErick MartínezÎncă nu există evaluări
- Ensayos A La Llama Colores Del Espectro Electromagnético en Diferentes Compuestos QuímicosDocument4 paginiEnsayos A La Llama Colores Del Espectro Electromagnético en Diferentes Compuestos QuímicosCristhian CasanovaÎncă nu există evaluări
- Mecánica Estadística IIDocument4 paginiMecánica Estadística IIAnonymous 5Mj54NyTXfÎncă nu există evaluări