S-ar putea să vă placă și
- CN Chap10 - Moments of InertiaDocument25 paginiCN Chap10 - Moments of Inertiaengineer_atulÎncă nu există evaluări
- StaticsDocument5 paginiStaticsPrinces TuguinayÎncă nu există evaluări
- Moment of InertiaDocument47 paginiMoment of InertiaRahul NayakÎncă nu există evaluări
- Moi Lec 2 & 3Document14 paginiMoi Lec 2 & 3afzal taiÎncă nu există evaluări
- Centroids & Centers of GravityDocument8 paginiCentroids & Centers of GravityElle HeartfiliaÎncă nu există evaluări
- Second Moment of AreaDocument4 paginiSecond Moment of AreaSarath ChandraÎncă nu există evaluări
- University Institute of Engineering Academic Unit 3Document38 paginiUniversity Institute of Engineering Academic Unit 3Vinoth Rouge RockersÎncă nu există evaluări
- Moment of Inertia and Properties of Plane Areas: Da DaDocument4 paginiMoment of Inertia and Properties of Plane Areas: Da DasherlockhishamÎncă nu există evaluări
- CIV Mod4@AzDocuments - inDocument15 paginiCIV Mod4@AzDocuments - inpreethiÎncă nu există evaluări
- Recent Progress of Algebraic Geometry in JapanDe la EverandRecent Progress of Algebraic Geometry in JapanÎncă nu există evaluări
- Moment of InertiaDocument56 paginiMoment of InertiaLalith Koushik GanganapalliÎncă nu există evaluări
- Moment of InertiaDocument56 paginiMoment of InertiaAyush 100ni100% (1)
- Extra Problems For MIDDocument4 paginiExtra Problems For MIDSaquibÎncă nu există evaluări
- 1 - Properties of Plane AreasDocument24 pagini1 - Properties of Plane AreasEng Ahmed Abdullah (Engineer)Încă nu există evaluări
- Moments of Inertia PDFDocument14 paginiMoments of Inertia PDFScott AlephÎncă nu există evaluări
- X X F DX X F: Applications of Integration Plane Areas by IntegrationDocument17 paginiX X F DX X F: Applications of Integration Plane Areas by IntegrationLee Anthony ChingÎncă nu există evaluări
- Inertia FormulasDocument4 paginiInertia FormulasLoysa Agtarap MataÎncă nu există evaluări
- Moment of InertiaDocument27 paginiMoment of InertiaPinca JoshuaÎncă nu există evaluări
- Moment of Inertia 2Document51 paginiMoment of Inertia 2Kunal kumarÎncă nu există evaluări
- Topic 6Document12 paginiTopic 6Sam LoveÎncă nu există evaluări
- Moment of InertiaDocument23 paginiMoment of InertiaHabtie WalleÎncă nu există evaluări
- Steel and Timber Design: Arch 415Document35 paginiSteel and Timber Design: Arch 415Glennson BalacanaoÎncă nu există evaluări
- Properties of Surfaces (Centre of Gravity & Moment of Inertia)Document48 paginiProperties of Surfaces (Centre of Gravity & Moment of Inertia)Tauseef100% (1)
- MATH 2E Lesson 4.5 4.6 4.7 HybridDocument6 paginiMATH 2E Lesson 4.5 4.6 4.7 HybridLyca Rose TrinidadÎncă nu există evaluări
- Principle Moment of InertiaDocument39 paginiPrinciple Moment of InertiaHritik TiwariÎncă nu există evaluări
- Applications of IntegrationDocument42 paginiApplications of IntegrationLoraine Ruth LumenÎncă nu există evaluări
- Trigonometric Functions: 1.1 Radian, and The Sine, Cosine and Tangent of An Angle in Standard PositionDocument9 paginiTrigonometric Functions: 1.1 Radian, and The Sine, Cosine and Tangent of An Angle in Standard PositionKelvin LauÎncă nu există evaluări
- Engineering-Mechanics (Chapter 9)Document23 paginiEngineering-Mechanics (Chapter 9)noah100% (1)
- Chapter 9: Distributed Forces: Moments of Inertia: Da y R A y A P FDocument5 paginiChapter 9: Distributed Forces: Moments of Inertia: Da y R A y A P FEngr Aizaz AhmadÎncă nu există evaluări
- APPLICATION 6 Moment of InertiaDocument44 paginiAPPLICATION 6 Moment of InertiaAnais RosalÎncă nu există evaluări
- Centroids and Centre of GravityDocument31 paginiCentroids and Centre of Gravitysakshm guptaÎncă nu există evaluări
- Moment of Inertia - Study Materials: WWW - Examsdaily.In ExamsdailyDocument3 paginiMoment of Inertia - Study Materials: WWW - Examsdaily.In ExamsdailymaanuÎncă nu există evaluări
- Definition of Moments of Inertia For Areas: Used in Formulas ForDocument10 paginiDefinition of Moments of Inertia For Areas: Used in Formulas ForMuhammad AgilÎncă nu există evaluări
- Review of Properties of Plane AreasDocument22 paginiReview of Properties of Plane Areascad camÎncă nu există evaluări
- Second Moment of AreaDocument9 paginiSecond Moment of AreaPham Cao ThanhÎncă nu există evaluări
- Bending StressDocument55 paginiBending StressRishika VitharanaÎncă nu există evaluări
- MathDocument7 paginiMathner sevillaÎncă nu există evaluări
- MEG 214 - 8aDocument49 paginiMEG 214 - 8aSimiloluwa ObasaÎncă nu există evaluări
- Moment of InertiaDocument50 paginiMoment of InertiaPg PgÎncă nu există evaluări
- Moment of InertiaDocument4 paginiMoment of InertiaZimad DarveÎncă nu există evaluări
- Moment of Inertia and Friction: September 2014Document25 paginiMoment of Inertia and Friction: September 2014Bee Mah LessÎncă nu există evaluări
- Sheet 10Document6 paginiSheet 10Youssef AlaaÎncă nu există evaluări
- Problem Sets - INTEGRAL CALCULUSDocument9 paginiProblem Sets - INTEGRAL CALCULUSMichaelÎncă nu există evaluări
- Moment of Inertia: I.E. P X (X) PXDocument6 paginiMoment of Inertia: I.E. P X (X) PXafzal taiÎncă nu există evaluări
- CH 6Document7 paginiCH 6GadisaÎncă nu există evaluări
- Civil Lect 3 - Propert of Plane Area 2017Document29 paginiCivil Lect 3 - Propert of Plane Area 2017Abdelhay Mohamed HassanÎncă nu există evaluări
- 3.1 Exercises Moment of InertiaDocument6 pagini3.1 Exercises Moment of InertiaSindayiheba PatrickÎncă nu există evaluări
- Unit 5Document19 paginiUnit 5supraskyline2003Încă nu există evaluări
- Moment of Inertia PDFDocument16 paginiMoment of Inertia PDFRio ChanÎncă nu există evaluări
- Area Moment of Inertia WRT An Inclined Axis - 202204070730Document32 paginiArea Moment of Inertia WRT An Inclined Axis - 202204070730Honorio Joshua P.Încă nu există evaluări
- Em Ut4Document21 paginiEm Ut4david josephÎncă nu există evaluări
- LectureSeries 01 SHMDocument42 paginiLectureSeries 01 SHMSUBIR KUMAR DasÎncă nu există evaluări
- Engineering Mechanics Statics: Yousif J. BasDocument25 paginiEngineering Mechanics Statics: Yousif J. Basalnd azadÎncă nu există evaluări
- Moment Inertia IntegrationDocument34 paginiMoment Inertia IntegrationTsuki Zombina100% (1)
- Moment of Inertia PDFDocument18 paginiMoment of Inertia PDFBernalyn ManaogÎncă nu există evaluări
- Properties of An Area:: 1. CentroidDocument2 paginiProperties of An Area:: 1. CentroidRalph Justin NinoblaÎncă nu există evaluări
- Moment of Inertia1 PDFDocument26 paginiMoment of Inertia1 PDFAashish BhandariÎncă nu există evaluări
- Moment of Inertia1 PDFDocument26 paginiMoment of Inertia1 PDFAashish BhandariÎncă nu există evaluări
- Moment of Inertia1 PDFDocument26 paginiMoment of Inertia1 PDFAashish BhandariÎncă nu există evaluări
- Module PreCalculusDocument63 paginiModule PreCalculusKaren JoyÎncă nu există evaluări
- Chap01 PDFDocument24 paginiChap01 PDFMarike Bunga HarfintanaÎncă nu există evaluări
- Bio-Data: Personal InformationDocument1 paginăBio-Data: Personal InformationRobinhood Jevons MartirezÎncă nu există evaluări
- Page 1: Breaker (Design, With 1 Paragraph) - For Layout PaDocument1 paginăPage 1: Breaker (Design, With 1 Paragraph) - For Layout PaRobinhood Jevons MartirezÎncă nu există evaluări
- STEM - Pre-Calculus CG PDFDocument5 paginiSTEM - Pre-Calculus CG PDFQuinnie Anne CarreonÎncă nu există evaluări
- WS #13 Piecewise PDFDocument2 paginiWS #13 Piecewise PDFRobinhood Jevons MartirezÎncă nu există evaluări
- Physics Kinematics Worksheet: SolutionsDocument3 paginiPhysics Kinematics Worksheet: SolutionsRobinhood Jevons MartirezÎncă nu există evaluări
- AdU Differential Equations Activity 1Document1 paginăAdU Differential Equations Activity 1Robinhood Jevons MartirezÎncă nu există evaluări
- Jiepr 1Document4 paginiJiepr 1Robinhood Jevons MartirezÎncă nu există evaluări
- Adamson University: Impact of Commuting Devices To The SocietyDocument8 paginiAdamson University: Impact of Commuting Devices To The SocietyRobinhood Jevons MartirezÎncă nu există evaluări
- 2 Less Lonely People in Da WordsDocument4 pagini2 Less Lonely People in Da WordsRobinhood Jevons MartirezÎncă nu există evaluări
- Jiepr 1Document4 paginiJiepr 1Robinhood Jevons MartirezÎncă nu există evaluări
- Jiepr 1Document4 paginiJiepr 1Robinhood Jevons MartirezÎncă nu există evaluări
- Explain The Cell Cycle As A ProcessDocument2 paginiExplain The Cell Cycle As A ProcessRobinhood Jevons MartirezÎncă nu există evaluări
- QwertyuiopDocument2 paginiQwertyuiopRobinhood Jevons MartirezÎncă nu există evaluări
- Jiepr 1Document4 paginiJiepr 1Robinhood Jevons MartirezÎncă nu există evaluări
- Chapter 1 - Process Description and Basis: Title Page Executive SummaryDocument1 paginăChapter 1 - Process Description and Basis: Title Page Executive SummaryRobinhood Jevons MartirezÎncă nu există evaluări
- Chapter 4Document8 paginiChapter 4Robinhood Jevons MartirezÎncă nu există evaluări
- Chap01 PDFDocument24 paginiChap01 PDFMarike Bunga HarfintanaÎncă nu există evaluări
- Collaborative Publishing, & and School Paper ManagementDocument60 paginiCollaborative Publishing, & and School Paper ManagementRobinhood Jevons MartirezÎncă nu există evaluări
- Sample STS Term PaperDocument8 paginiSample STS Term Paperchristian achicoÎncă nu există evaluări
- Chemistry For Engineers Problem Set #1Document1 paginăChemistry For Engineers Problem Set #1Robinhood Jevons MartirezÎncă nu există evaluări
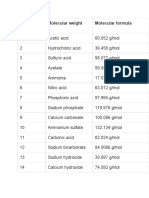
- Compound Name Molecular Weight Molecular FormulaDocument21 paginiCompound Name Molecular Weight Molecular FormulaRobinhood Jevons MartirezÎncă nu există evaluări
- Egg Drop LabDocument5 paginiEgg Drop LabRobinhood Jevons MartirezÎncă nu există evaluări
- Activity For Pe4Document2 paginiActivity For Pe4Robinhood Jevons MartirezÎncă nu există evaluări
- Math 21 Sample 1st ExamDocument2 paginiMath 21 Sample 1st ExamRobinhood Jevons MartirezÎncă nu există evaluări
- Gabrielle Palomillo: CredentialsDocument2 paginiGabrielle Palomillo: CredentialsRobinhood Jevons MartirezÎncă nu există evaluări
- The Problem and Its BackgroundDocument41 paginiThe Problem and Its BackgroundRobinhood Jevons MartirezÎncă nu există evaluări
- Production of Toilet SoapDocument60 paginiProduction of Toilet Soapiko856100% (2)
- Sample Term-End ProjectDocument23 paginiSample Term-End ProjectRobinhood Jevons MartirezÎncă nu există evaluări
- Form 4 Physics Chapter 4 - Teacher'sDocument9 paginiForm 4 Physics Chapter 4 - Teacher'sPavithiran50% (2)
- CBSE Class 12 Physics Board Exam 2019: Most Important Topics and DerivationsDocument8 paginiCBSE Class 12 Physics Board Exam 2019: Most Important Topics and DerivationsSahil SainiÎncă nu există evaluări
- Applications of Circular MotionDocument3 paginiApplications of Circular Motionmonkey2rockz100% (2)
- Get TRDocDocument347 paginiGet TRDockrishnamoorthy_krish100% (1)
- Siemens PLM LMS Torsional Vibration WP Tcm78 228179Document19 paginiSiemens PLM LMS Torsional Vibration WP Tcm78 228179liu123yongÎncă nu există evaluări
- Modul Ansys Day 3Document28 paginiModul Ansys Day 3GiLang MaulanaÎncă nu există evaluări
- Gen Physics 1 Wk3Document10 paginiGen Physics 1 Wk3Hannah Bianca RegullanoÎncă nu există evaluări
- MIND MAP For PhysicsDocument4 paginiMIND MAP For Physicsalliey71% (7)
- Module of Analytic MechanicsDocument32 paginiModule of Analytic MechanicsMirza MueidÎncă nu există evaluări
- 10 Lenoir CycleDocument2 pagini10 Lenoir Cyclecaptainhass100% (1)
- Nonlinear FE Analysis of The Ultimate Behavior of Steel Castellated Beams PDFDocument14 paginiNonlinear FE Analysis of The Ultimate Behavior of Steel Castellated Beams PDFNoviantyHePheiFangÎncă nu există evaluări
- Introdution To OpenfoamDocument6 paginiIntrodution To OpenfoamFarid Ahmed KhanÎncă nu există evaluări
- Deformation and Failure of Materials: Dr. Rer. Nat. Ravi Kumar, N VDocument38 paginiDeformation and Failure of Materials: Dr. Rer. Nat. Ravi Kumar, N VAvani mm21b013Încă nu există evaluări
- Lab 1 (Full)Document22 paginiLab 1 (Full)Anonymous 8UOCBqiÎncă nu există evaluări
- Trim-Cfd Marseille 24mai2012Document24 paginiTrim-Cfd Marseille 24mai2012Manoj KumarÎncă nu există evaluări
- Materials and Design: Paul J. Hazell, Colin J. Roberson, Mauricio MoutinhoDocument7 paginiMaterials and Design: Paul J. Hazell, Colin J. Roberson, Mauricio MoutinhoBhasker RamagiriÎncă nu există evaluări
- Free-Falling Object ExperimentDocument9 paginiFree-Falling Object ExperimentUgur ASİT100% (4)
- Pages From DESIGN OF STEEL STRUCTURES (NORSOK) - 3Document5 paginiPages From DESIGN OF STEEL STRUCTURES (NORSOK) - 3dunglxÎncă nu există evaluări
- TripticoDocument2 paginiTripticoapi-294011342Încă nu există evaluări
- Nano Indentation PDFDocument48 paginiNano Indentation PDFshreyam100% (1)
- Classical MachanicsDocument14 paginiClassical Machanicsrahul shuklaÎncă nu există evaluări
- CFDDocument36 paginiCFDpavan_joshi_5Încă nu există evaluări
- Solutions 2 PHYSICS 2Document6 paginiSolutions 2 PHYSICS 2MARIAMA SILLAHÎncă nu există evaluări
- PhysicsBowl 2017Document11 paginiPhysicsBowl 2017Ajay NegiÎncă nu există evaluări
- Generalized Matrix Method For The Design and Analysis of Vibration-Isolation SystemsDocument10 paginiGeneralized Matrix Method For The Design and Analysis of Vibration-Isolation SystemsJessica VieiraÎncă nu există evaluări
- Generalized Quasicontinuum Modeling of Metallic Lattices With Geometrical and Material Nonlinearity and VariabilityDocument26 paginiGeneralized Quasicontinuum Modeling of Metallic Lattices With Geometrical and Material Nonlinearity and VariabilitykishoreÎncă nu există evaluări
- Basic Tech Question JSS1Document6 paginiBasic Tech Question JSS1sunliasÎncă nu există evaluări
- Paper AcumDocument10 paginiPaper AcumHectorMaldonadoÎncă nu există evaluări
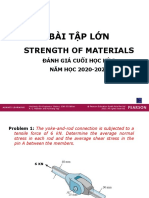
- Đề Bài tập lớn - Môn Strength of MaterialsDocument10 paginiĐề Bài tập lớn - Môn Strength of MaterialsDinh leÎncă nu există evaluări
- Lab Report 3 - Energy and MotionDocument6 paginiLab Report 3 - Energy and MotionDawood SulemanÎncă nu există evaluări