S-ar putea să vă placă și
- Service Manual: Publication AP5296Document54 paginiService Manual: Publication AP5296stefano blu100% (2)
- PEC 2017 Short Circuit Calculation SampleDocument8 paginiPEC 2017 Short Circuit Calculation SamplemarvinÎncă nu există evaluări
- Mandibular MovementDocument56 paginiMandibular MovementSahana RangarajanÎncă nu există evaluări
- Brochure Off Grid Backup and Island Systems en WebDocument100 paginiBrochure Off Grid Backup and Island Systems en WebDaniel TrakysÎncă nu există evaluări
- Review: Types of Finish Lines or Gingival Margins Intooth PreparationDocument6 paginiReview: Types of Finish Lines or Gingival Margins Intooth PreparationSahana RangarajanÎncă nu există evaluări
- Different Types of Tooth PreparationDocument56 paginiDifferent Types of Tooth PreparationSahana Rangarajan100% (1)
- 2008-11-16 Service Manual - General - Multi V Sync II Outdoor Unit - mfl50459504 - 20120105122839Document159 pagini2008-11-16 Service Manual - General - Multi V Sync II Outdoor Unit - mfl50459504 - 20120105122839Hamdi KizilyelÎncă nu există evaluări
- Implementation of Robotic Arm Control Wi E4b9b3cb PDFDocument5 paginiImplementation of Robotic Arm Control Wi E4b9b3cb PDFCahya KamilaÎncă nu există evaluări
- A319 - A321 - LAA - and - LUS - A321NX - (Trouble Shooting Manual)Document27 paginiA319 - A321 - LAA - and - LUS - A321NX - (Trouble Shooting Manual)A WongÎncă nu există evaluări
- 3D Printing Industry Roadmap - India (Aerospace) Summit DocumentDocument19 pagini3D Printing Industry Roadmap - India (Aerospace) Summit DocumentSahana RangarajanÎncă nu există evaluări
- 6.clinical Case ReportMultidisciplinary Approach For Rehabilitation of Debilitated Anterior ToothDocument6 pagini6.clinical Case ReportMultidisciplinary Approach For Rehabilitation of Debilitated Anterior ToothSahana RangarajanÎncă nu există evaluări
- Myoelectric Prosthetic ArmDocument2 paginiMyoelectric Prosthetic ArmGRD JournalsÎncă nu există evaluări
- Barco Serie BDocument517 paginiBarco Serie BReynaldo GonzalezÎncă nu există evaluări
- Brain Computer Interface Technical Seminar ReportDocument11 paginiBrain Computer Interface Technical Seminar ReportA.srikanth100% (1)
- 7 RetainerinorthodonticsDocument6 pagini7 RetainerinorthodonticsSahana RangarajanÎncă nu există evaluări
- Occlusion in Complete DentureDocument57 paginiOcclusion in Complete DentureSahana Rangarajan100% (1)
- Support in Complete DentureDocument30 paginiSupport in Complete DentureSahana Rangarajan100% (2)
- Design & Analysis of Prosthetic Hand With EMG Technology in 3-D Printing MachineDocument5 paginiDesign & Analysis of Prosthetic Hand With EMG Technology in 3-D Printing MachineAll Engineering ElectronicsÎncă nu există evaluări
- Design of An Affordable Prosthetic Arm Equipped With Deep Learning Vision-Based ManipulationDocument7 paginiDesign of An Affordable Prosthetic Arm Equipped With Deep Learning Vision-Based Manipulationnessus joshua aragonés salazarÎncă nu există evaluări
- IJEDR1803109 - Myoelectric Hand PDFDocument5 paginiIJEDR1803109 - Myoelectric Hand PDFUmang SutharÎncă nu există evaluări
- IJEDR1803109Document6 paginiIJEDR1803109NilutpalÎncă nu există evaluări
- Myoelectric Control With Abstract DecodersDocument16 paginiMyoelectric Control With Abstract DecodersLaura PasqualÎncă nu există evaluări
- Humanoid-Robot Aswath, Et - AlDocument5 paginiHumanoid-Robot Aswath, Et - Alshaik roshanÎncă nu există evaluări
- 1909 09910 PDFDocument13 pagini1909 09910 PDFDimitrije Mita PešićÎncă nu există evaluări
- Ijirt159791 PaperDocument4 paginiIjirt159791 PaperMadhura Hande -DeshmukhÎncă nu există evaluări
- Design and Implementation of Prosthetic Arm UsingDocument6 paginiDesign and Implementation of Prosthetic Arm UsingNada GhammemÎncă nu există evaluări
- IJSRET V7 Issue1 145Document8 paginiIJSRET V7 Issue1 145tomrobin1998Încă nu există evaluări
- IJSRET V7 Issue1 145Document8 paginiIJSRET V7 Issue1 145Sachin RathodÎncă nu există evaluări
- Grasp Recognition From Myoelectric Signals: Simon Ferguson G Reg DunlopDocument5 paginiGrasp Recognition From Myoelectric Signals: Simon Ferguson G Reg Dunlopwmp8611024213Încă nu există evaluări
- A Low-Cost, Open-Source, Compliant Hand For Enabling Sensorimotor Control For People With Transradial AmputationsDocument4 paginiA Low-Cost, Open-Source, Compliant Hand For Enabling Sensorimotor Control For People With Transradial Amputationsmanju.vs1546Încă nu există evaluări
- Acquisition and Analysis of EMG Signals To Recognize Multiple Hand Movements For Prosthetic ApplicationsDocument12 paginiAcquisition and Analysis of EMG Signals To Recognize Multiple Hand Movements For Prosthetic ApplicationsEdgarGonzálezÎncă nu există evaluări
- SensorsDocument30 paginiSensorsJuan sebastian lopez escobarÎncă nu există evaluări
- Inkjet Printed Fully Customizable and Low Cost Electrodes Matrix For Gesture RecognitionDocument12 paginiInkjet Printed Fully Customizable and Low Cost Electrodes Matrix For Gesture RecognitionHaider KhalilÎncă nu există evaluări
- Astesj 0203111Document9 paginiAstesj 0203111Eng Hanaa7Încă nu există evaluări
- 1 - 1 - A Article A Systematic StudyDocument13 pagini1 - 1 - A Article A Systematic StudyJavier Canto ÁngelesÎncă nu există evaluări
- Ugen: A Myoelectrically Triggered Orthotic System For Stroke Neurorehabilitation of The Index Finger Using Surface BioelectrodesDocument6 paginiUgen: A Myoelectrically Triggered Orthotic System For Stroke Neurorehabilitation of The Index Finger Using Surface BioelectrodesMatthew DavidsonÎncă nu există evaluări
- 3 - A Modular Transradial Bypass SocketDocument8 pagini3 - A Modular Transradial Bypass SocketMichealowen BabygoalÎncă nu există evaluări
- Biosensors 11 00411 v2Document15 paginiBiosensors 11 00411 v2tanvir anwarÎncă nu există evaluări
- Using Eye Movement To Control A Computer A DesignDocument11 paginiUsing Eye Movement To Control A Computer A DesignMariñañam GonzálezÎncă nu există evaluări
- Prosthetic ArmDocument16 paginiProsthetic ArmJINAL PRAFULKUMAR SHETHÎncă nu există evaluări
- Portable EMG Data Acquisition Module For Upper Limb Prosthesis ApplicationDocument8 paginiPortable EMG Data Acquisition Module For Upper Limb Prosthesis ApplicationHoàng ThắngÎncă nu există evaluări
- Non Invasivebrain ComputerinterfaceforprostheticlimbscontrolinmilitaryDocument14 paginiNon Invasivebrain ComputerinterfaceforprostheticlimbscontrolinmilitaryHayder AdnanÎncă nu există evaluări
- Electroencephalography (EEG) Captured From The Human Scalp Is Commonly Used AnDocument7 paginiElectroencephalography (EEG) Captured From The Human Scalp Is Commonly Used AnKainat YousafÎncă nu există evaluări
- Bionic Arm Using Muscle SensorDocument11 paginiBionic Arm Using Muscle SensorIJRASETPublicationsÎncă nu există evaluări
- Using Textile Electrode EMG For Prosthetic Movement Identification in Transradial AmputeesDocument6 paginiUsing Textile Electrode EMG For Prosthetic Movement Identification in Transradial AmputeesGOKUL THANGAVELÎncă nu există evaluări
- Calibration Algorithm and Electrode Array For EMG of ProstheticDocument19 paginiCalibration Algorithm and Electrode Array For EMG of ProstheticExperian ElitiawanÎncă nu există evaluări
- Proportional EMG Control For Upper-Limb Powered ExoskeletonsDocument5 paginiProportional EMG Control For Upper-Limb Powered ExoskeletonsHassan abokouraÎncă nu există evaluări
- 2020 A Bio-Signal Enhanced Adaptive Impedance Controller For LowerDocument6 pagini2020 A Bio-Signal Enhanced Adaptive Impedance Controller For LowerANSHUMAAN P BHAGATÎncă nu există evaluări
- TMP DBE7Document6 paginiTMP DBE7FrontiersÎncă nu există evaluări
- Psoc-Based Embedded System For The Acquisition of Emg Signals With Android Mobile Device DisplayDocument6 paginiPsoc-Based Embedded System For The Acquisition of Emg Signals With Android Mobile Device DisplayAlex BogmaÎncă nu există evaluări
- Signal Condition and Acquisition System For A Low Cost EMG Based Prosthetic HandDocument9 paginiSignal Condition and Acquisition System For A Low Cost EMG Based Prosthetic HandNazhan HakeemÎncă nu există evaluări
- Gesture Recognition Based On Nano-Gold Flexible Sensor UsingDocument6 paginiGesture Recognition Based On Nano-Gold Flexible Sensor UsingChristian F. VegaÎncă nu există evaluări
- Bio Mechatronic HandDocument27 paginiBio Mechatronic HandDeviprasad M100% (1)
- Adaptive Control of Exoskeleton Robots For Periodic Assistive Behaviours Based On EMG Feedback MinimisationDocument26 paginiAdaptive Control of Exoskeleton Robots For Periodic Assistive Behaviours Based On EMG Feedback MinimisationSadoÎncă nu există evaluări
- Classification of Wrist Movements Through EMG Signals With Fuzzy Logic AlgorithmDocument4 paginiClassification of Wrist Movements Through EMG Signals With Fuzzy Logic AlgorithmMushfiqur Rahman JimÎncă nu există evaluări
- The Starfish Procedure For Independent Digital.12Document7 paginiThe Starfish Procedure For Independent Digital.12DavidÎncă nu există evaluări
- Eathe - Music: A Multimedia Interface Controlled by Eye Movement and BreathingDocument4 paginiEathe - Music: A Multimedia Interface Controlled by Eye Movement and Breathingharrywright88Încă nu există evaluări
- Human Hand Motion Analysis With Multisensory Information: Zhaojie Ju, Member, IEEE, and Honghai Liu, Senior Member, IEEEDocument11 paginiHuman Hand Motion Analysis With Multisensory Information: Zhaojie Ju, Member, IEEE, and Honghai Liu, Senior Member, IEEEchoomerÎncă nu există evaluări
- Materials, Devices, and Systems of On-Skin Electrodes For Electrophysiological Monitoring and Human-Machine InterfacesDocument30 paginiMaterials, Devices, and Systems of On-Skin Electrodes For Electrophysiological Monitoring and Human-Machine InterfacesRendy PutraaaÎncă nu există evaluări
- V3i8 Ijertv3is080865Document6 paginiV3i8 Ijertv3is080865علي كامل الاسديÎncă nu există evaluări
- Electro Oculography: A Current Project Beeing Done by Us Under Indian Institute of Technology Madras (Iitm)Document8 paginiElectro Oculography: A Current Project Beeing Done by Us Under Indian Institute of Technology Madras (Iitm)ARVINDÎncă nu există evaluări
- Electronics: Analysis and Recognition of Human Lower Limb Motions Based On Electromyography (EMG) SignalsDocument21 paginiElectronics: Analysis and Recognition of Human Lower Limb Motions Based On Electromyography (EMG) SignalsAhmad M. DagamsehÎncă nu există evaluări
- 1 PB PDFDocument15 pagini1 PB PDFsrikanth thallapalliÎncă nu există evaluări
- Bioarm, A Prostheses Without Surgery: J. Sagouis, A. Chamel, E. Carre, C. Casasreales, G. Rudnik, M. CerdanDocument4 paginiBioarm, A Prostheses Without Surgery: J. Sagouis, A. Chamel, E. Carre, C. Casasreales, G. Rudnik, M. Cerdanranganath lollaÎncă nu există evaluări
- Myoelectric ArmDocument22 paginiMyoelectric ArmmoinaersadÎncă nu există evaluări
- Biomechatronics Design of A Novel Artificial Arm: A. Malik Mohd Ali M. Mahadi - Abdul JamilDocument5 paginiBiomechatronics Design of A Novel Artificial Arm: A. Malik Mohd Ali M. Mahadi - Abdul JamilİTYÎncă nu există evaluări
- Fernández-Rodríguez 2016 Review Real Brain Controlled WheelchairsDocument16 paginiFernández-Rodríguez 2016 Review Real Brain Controlled WheelchairsCindy ZuritaÎncă nu există evaluări
- Bionic Arm: AbstractDocument3 paginiBionic Arm: AbstractImran AkhtarÎncă nu există evaluări
- EMG Based Hand Gesture Classification UsingDocument4 paginiEMG Based Hand Gesture Classification UsingChristian F. VegaÎncă nu există evaluări
- Advanced Exoskeleton Armv1.5Document5 paginiAdvanced Exoskeleton Armv1.5MasterAnimusÎncă nu există evaluări
- Self-Contained Neuromusculoskeletal Arm Prostheses: Brief ReportDocument7 paginiSelf-Contained Neuromusculoskeletal Arm Prostheses: Brief ReportGaspar ContrerasÎncă nu există evaluări
- AttentivU A Wearable Pair of EEG and EOGDocument4 paginiAttentivU A Wearable Pair of EEG and EOGPriya ManojÎncă nu există evaluări
- Conexión Directa ANTIGUA (2009) Entre El Cerebro y Protesisdirect - Neural - Sensory - Feedback - and - Control - of - A - Prosthetic - ArmDocument5 paginiConexión Directa ANTIGUA (2009) Entre El Cerebro y Protesisdirect - Neural - Sensory - Feedback - and - Control - of - A - Prosthetic - ArmAERMÎncă nu există evaluări
- Brain Computer Interface Decoding Performance using EEG Error Related PotentialsDe la EverandBrain Computer Interface Decoding Performance using EEG Error Related PotentialsÎncă nu există evaluări
- Dynamic Navigation in Dental Implantology: The Influence of Surgical Experience On Implant Placement Accuracy and Operating Time. An in Vitro StudyDocument9 paginiDynamic Navigation in Dental Implantology: The Influence of Surgical Experience On Implant Placement Accuracy and Operating Time. An in Vitro StudySahana RangarajanÎncă nu există evaluări
- Finishing and Polishing Agents: - Presented by DR Arpita DuttaDocument89 paginiFinishing and Polishing Agents: - Presented by DR Arpita DuttaSahana RangarajanÎncă nu există evaluări
- Support in Complete DentureDocument16 paginiSupport in Complete DentureSahana RangarajanÎncă nu există evaluări
- Factors Affecting Shade of All Ceramic Restorations - A Literature ReviewDocument8 paginiFactors Affecting Shade of All Ceramic Restorations - A Literature ReviewSahana RangarajanÎncă nu există evaluări
- A Hollow Bulb Obturator For Maxillary Resection in A Completely Edentulous PatientDocument6 paginiA Hollow Bulb Obturator For Maxillary Resection in A Completely Edentulous PatientSahana RangarajanÎncă nu există evaluări
- Fulltext - Jda v5 Id1107Document3 paginiFulltext - Jda v5 Id1107Sahana RangarajanÎncă nu există evaluări
- Clinical Report Rehabilitation of Maxillary Surgical Defect With A Cast Partial Denture ObturatorDocument4 paginiClinical Report Rehabilitation of Maxillary Surgical Defect With A Cast Partial Denture ObturatorSahana RangarajanÎncă nu există evaluări
- 7 Shreeprada Dash IJPHRDDecember 2018 IssueDocument7 pagini7 Shreeprada Dash IJPHRDDecember 2018 IssueSahana RangarajanÎncă nu există evaluări
- Sauser 1957Document9 paginiSauser 1957Sahana RangarajanÎncă nu există evaluări
- Long-Term Follow-Up of Maxillary Fixed Retention: Survival Rate and Periodontal HealthDocument7 paginiLong-Term Follow-Up of Maxillary Fixed Retention: Survival Rate and Periodontal HealthSahana RangarajanÎncă nu există evaluări
- Mouth Guards in Dentistry-A Review: September 2018Document6 paginiMouth Guards in Dentistry-A Review: September 2018Sahana RangarajanÎncă nu există evaluări
- Significance of Facebow For Dental RestorationsDocument5 paginiSignificance of Facebow For Dental RestorationsSahana RangarajanÎncă nu există evaluări
- Elegant Galaxy Background Breakthrough by SlidesgoDocument48 paginiElegant Galaxy Background Breakthrough by SlidesgoSahana RangarajanÎncă nu există evaluări
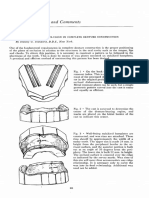
- Cases and Comments: by Stanley G. Standard, D.D.S., New YorkDocument3 paginiCases and Comments: by Stanley G. Standard, D.D.S., New YorkSahana RangarajanÎncă nu există evaluări
- Prosthodontics Horizontal Jaw Relation: Dr. Firas AbdulameerDocument6 paginiProsthodontics Horizontal Jaw Relation: Dr. Firas AbdulameerSahana RangarajanÎncă nu există evaluări
- Gothic Arch TrachingDocument7 paginiGothic Arch TrachingSahana RangarajanÎncă nu există evaluări
- Lot No. SL Awb Year No. of Pkgs Gross Wt. in Kg. Description of Goods Category Hs Code Igst% Year of Import 2017. Nobid E-Auction 003Document4 paginiLot No. SL Awb Year No. of Pkgs Gross Wt. in Kg. Description of Goods Category Hs Code Igst% Year of Import 2017. Nobid E-Auction 003anoopiit2012Încă nu există evaluări
- Photo - 2 - 2023 04 18 - 14 23 38 MergedDocument13 paginiPhoto - 2 - 2023 04 18 - 14 23 38 MergedDon't KnowÎncă nu există evaluări
- Dell Xps l501x - Quanta Gm6b Dis - Rev 2bDocument56 paginiDell Xps l501x - Quanta Gm6b Dis - Rev 2bRicardo JuckiewskiÎncă nu există evaluări
- Operation Manual of TAIE (FU, FY, FA)Document65 paginiOperation Manual of TAIE (FU, FY, FA)Cristian Ortiz0% (1)
- Clasificacion de Temperatura en Cables y TerminalesDocument7 paginiClasificacion de Temperatura en Cables y TerminalesMaxÎncă nu există evaluări
- Integrated Voltage RegulatorDocument23 paginiIntegrated Voltage RegulatorGabriel Paco LunaÎncă nu există evaluări
- DS3231 Extremely Accurate I C-Integrated RTC/TCXO/Crystal: General Description FeaturesDocument20 paginiDS3231 Extremely Accurate I C-Integrated RTC/TCXO/Crystal: General Description FeaturesPuiu BercioiuÎncă nu există evaluări
- Datasheet - HK F30u60dn 2216470 PDFDocument4 paginiDatasheet - HK F30u60dn 2216470 PDFHeri AltisÎncă nu există evaluări
- CI60 CI60G InstallationManualDocument102 paginiCI60 CI60G InstallationManualChristian ReyesÎncă nu există evaluări
- A Review On Reversible Computing and It's Applications On Combinational CircuitsDocument9 paginiA Review On Reversible Computing and It's Applications On Combinational CircuitsVelumani sÎncă nu există evaluări
- Tas 5612 LaDocument43 paginiTas 5612 LaArcangel CasteloÎncă nu există evaluări
- 540w Axitec Germany Brand Solar PV Panels ModulesDocument2 pagini540w Axitec Germany Brand Solar PV Panels Modulessalem jawherÎncă nu există evaluări
- Lab Report 2Document10 paginiLab Report 2Muhammad Nabeel TayyabÎncă nu există evaluări
- GSM 350 PG2 InstallationManualDocument1 paginăGSM 350 PG2 InstallationManualcbochrisÎncă nu există evaluări
- Comparison of WiFi Amplifiers As Output Power Amplifier For QO-100 Transmit Converter - RA3APW Personal WebsiteDocument15 paginiComparison of WiFi Amplifiers As Output Power Amplifier For QO-100 Transmit Converter - RA3APW Personal WebsiteVictor P (YO4TNV)Încă nu există evaluări
- Determination of Pack-Set Index of Portland Cement: Standard Test Method ForDocument5 paginiDetermination of Pack-Set Index of Portland Cement: Standard Test Method ForINARQ1979Încă nu există evaluări
- RM-5000 Series: Indicator/Alarm UnitDocument81 paginiRM-5000 Series: Indicator/Alarm UnitpcatruongÎncă nu există evaluări
- Wireless Transmission MediaDocument14 paginiWireless Transmission Mediavikas vermaÎncă nu există evaluări
- ER TFTM0.96 1 - DatasheetDocument23 paginiER TFTM0.96 1 - DatasheetEdon DergutiÎncă nu există evaluări
- Altivar 71 - ATV71HD37N4Document5 paginiAltivar 71 - ATV71HD37N4Antonio ValenzuelaÎncă nu există evaluări
- Sequential Shifter Fitting Instructions v2 A4Document17 paginiSequential Shifter Fitting Instructions v2 A4Ufix FabricationÎncă nu există evaluări
- Automatic Transfer Switch Between Two Generator Sets: IntroductionDocument7 paginiAutomatic Transfer Switch Between Two Generator Sets: IntroductionGalal qasimÎncă nu există evaluări
- Distributor: Breaker & Switchgears Overseas Sales DeptDocument58 paginiDistributor: Breaker & Switchgears Overseas Sales DeptLUATÎncă nu există evaluări