S-ar putea să vă placă și
- Dynamic Response of Pile-Cap Structure Under Random Sea Wave ActionDocument9 paginiDynamic Response of Pile-Cap Structure Under Random Sea Wave Actionmocker1987Încă nu există evaluări
- Proceedings of The 13-th (2003) ConferenceDocument7 paginiProceedings of The 13-th (2003) ConferenceYuriy KrayniyÎncă nu există evaluări
- Stability of Small Fishing Vessels in Longitudinal Waves: M.A.S. Neves, N.A. Pe Rez, L. ValerioDocument31 paginiStability of Small Fishing Vessels in Longitudinal Waves: M.A.S. Neves, N.A. Pe Rez, L. ValerioLenin ValerioÎncă nu există evaluări
- Broaching of Small BoatsDocument12 paginiBroaching of Small BoatsNourin Obaid DinaÎncă nu există evaluări
- Scale Model Tests of A Fishing Vessel in Roll Motion Parametric ResonanceDocument6 paginiScale Model Tests of A Fishing Vessel in Roll Motion Parametric ResonanceLenin ValerioÎncă nu există evaluări
- MP Avt 110 30Document12 paginiMP Avt 110 30Yanyan2009Încă nu există evaluări
- Ship Stability in Wave A Proposal Method For Dynamic BehaviourDocument6 paginiShip Stability in Wave A Proposal Method For Dynamic BehaviourParbati SahaÎncă nu există evaluări
- Application of Geophysical Methods For PDocument16 paginiApplication of Geophysical Methods For PLama Al KurdiÎncă nu există evaluări
- Hydrodynamical Loads On A FloatingDocument5 paginiHydrodynamical Loads On A FloatingVanessa ThomazÎncă nu există evaluări
- Nwogu Omae 1991Document6 paginiNwogu Omae 1991mohdsolihat1Încă nu există evaluări
- Oe 72 (2013) 453 SRS, CGSDocument17 paginiOe 72 (2013) 453 SRS, CGSsbnrs68Încă nu există evaluări
- Wind Sea and Swell Estimation-Energy equivalence-IIDocument14 paginiWind Sea and Swell Estimation-Energy equivalence-IIranjeetÎncă nu există evaluări
- Faria Et Al-1998-Journal of Geophysical Research - Oceans (1978-2012) PDFDocument16 paginiFaria Et Al-1998-Journal of Geophysical Research - Oceans (1978-2012) PDFAnonymous 7oIDoGjÎncă nu există evaluări
- Introduction To The Analysis and DesignDocument11 paginiIntroduction To The Analysis and DesignSHK_1234Încă nu există evaluări
- Wave Propagation in Shallow Water: Ert - C WDocument24 paginiWave Propagation in Shallow Water: Ert - C WMarco QuirozÎncă nu există evaluări
- CETNNmlongcwDocument13 paginiCETNNmlongcwPiank crazyÎncă nu există evaluări
- 087 GC2014 Deterministic Marine Deghosting Tutorial and AdvancesDocument6 pagini087 GC2014 Deterministic Marine Deghosting Tutorial and AdvancesSudip RayÎncă nu există evaluări
- Dynamic Amplification of Drag Dominated Structures in Irregular SeasDocument9 paginiDynamic Amplification of Drag Dominated Structures in Irregular SeasSholeh Khuddin A MadridistaÎncă nu există evaluări
- XbhuDocument10 paginiXbhuAshish KumarÎncă nu există evaluări
- Numerical Investigation of The Seakeeping Behavior of A CatamaranDocument17 paginiNumerical Investigation of The Seakeeping Behavior of A CatamaranVăn Sương SỳÎncă nu există evaluări
- 1 s2.0 S0029801818307789 MainDocument13 pagini1 s2.0 S0029801818307789 Main杨林Încă nu există evaluări
- 2015 - Numerical Method Trimaran Wave ResistanceDocument15 pagini2015 - Numerical Method Trimaran Wave Resistancenauval.archÎncă nu există evaluări
- Hull Design Considerations For Improved Stability of Fishing Vessels in WavesDocument14 paginiHull Design Considerations For Improved Stability of Fishing Vessels in WavesEd UrquizaÎncă nu există evaluări
- One Degree of Freedom Resonance Wave Energy ConvertorDocument11 paginiOne Degree of Freedom Resonance Wave Energy ConvertorMr PolashÎncă nu există evaluări
- 2 - Special Contribution - Matsumoto - RevDocument6 pagini2 - Special Contribution - Matsumoto - RevNic LeeÎncă nu există evaluări
- Underwater Explosion Damage of Ship Hull Panels PDFDocument10 paginiUnderwater Explosion Damage of Ship Hull Panels PDFFernando Raúl LADINOÎncă nu există evaluări
- Wave Piercing Cat at SeaDocument7 paginiWave Piercing Cat at SeaNanda Hlaing Myint100% (1)
- Surface Waves Dispersion Curves of Eurasian Earthquakes: The Sval ProgramDocument18 paginiSurface Waves Dispersion Curves of Eurasian Earthquakes: The Sval Programdebora sÎncă nu există evaluări
- Calculation of Expected Sliding Distance of CaissonDocument36 paginiCalculation of Expected Sliding Distance of CaissonDinar IstiyantoÎncă nu există evaluări
- Rsu Drilling Mooring Riser ProposalDocument9 paginiRsu Drilling Mooring Riser ProposalCROSSFIELD ENGINEERING ENERGYÎncă nu există evaluări
- Literature Review On The Stratified WakesDocument23 paginiLiterature Review On The Stratified WakesSugan NallaÎncă nu există evaluări
- Simulation of Ship Motion in Seaway: and Mogens BlankeDocument13 paginiSimulation of Ship Motion in Seaway: and Mogens BlankeEgwuatu UchennaÎncă nu există evaluări
- Computer Simulation of Moored Ship Motion Induced by Harbor Resonance in Pohang New HarborDocument12 paginiComputer Simulation of Moored Ship Motion Induced by Harbor Resonance in Pohang New HarborrezbahalÎncă nu există evaluări
- Design of Offshore StructuresDocument11 paginiDesign of Offshore StructuresInayath Hussain100% (1)
- Denoising DataDocument7 paginiDenoising DataTugba ÖzacarÎncă nu există evaluări
- GP 418 - 1 - Exploration Seismology-I IntroductionDocument80 paginiGP 418 - 1 - Exploration Seismology-I IntroductionvishnuÎncă nu există evaluări
- Wave Propagation ModellingDocument12 paginiWave Propagation ModellingsimoÎncă nu există evaluări
- Estimating Ocean Wave Directional SpreadingDocument23 paginiEstimating Ocean Wave Directional SpreadingYoungkook KimÎncă nu există evaluări
- Paper Muttray Et AlDocument13 paginiPaper Muttray Et AlWakhidatik NurfaidaÎncă nu există evaluări
- Jao Apna Kaam KroDocument12 paginiJao Apna Kaam KroFahim MarwatÎncă nu există evaluări
- Wavemaker TheoriesDocument33 paginiWavemaker TheoriesRonaldyn DabuÎncă nu există evaluări
- Fatigue Analysis of Jacket Support Structure For Offshore Wind TurbinesDocument14 paginiFatigue Analysis of Jacket Support Structure For Offshore Wind TurbineshuutrongÎncă nu există evaluări
- 國內填海造陸背填料防漏設計案例探討Document14 pagini國內填海造陸背填料防漏設計案例探討喬誌江Încă nu există evaluări
- CFD and CHA Simulation of Underwater Noise Induced by A Marine Propeller in Two-Phase FlowsDocument15 paginiCFD and CHA Simulation of Underwater Noise Induced by A Marine Propeller in Two-Phase FlowsMalvin SetiawanÎncă nu există evaluări
- Bower 1966 The Determination of Cross-Coupling Errors in The Measurement of Gravity at SeaDocument7 paginiBower 1966 The Determination of Cross-Coupling Errors in The Measurement of Gravity at Seaandres pientroÎncă nu există evaluări
- Reliability and Safety of Tension Leg PlatformsDocument8 paginiReliability and Safety of Tension Leg PlatformsStevenÎncă nu există evaluări
- Fully Three-Dimensional Ship Seakeeping Computations With A Surge-Corrected Rankine Panel MethodDocument8 paginiFully Three-Dimensional Ship Seakeeping Computations With A Surge-Corrected Rankine Panel MethodSahil JawaÎncă nu există evaluări
- Colagrossi Etal Nutts98Document4 paginiColagrossi Etal Nutts98dhana_benzÎncă nu există evaluări
- Calculating Wave-Generated Bottom Orbital Velocities From Surface-Wave ParametersDocument20 paginiCalculating Wave-Generated Bottom Orbital Velocities From Surface-Wave Parametersgana slimÎncă nu există evaluări
- 2017 - Numerical Prediction of Vertical Ship Motions and Added ResistanceDocument11 pagini2017 - Numerical Prediction of Vertical Ship Motions and Added ResistanceGeorge NovacÎncă nu există evaluări
- Simulation of Shoreline Change Behind A Submerged Permeable BreakwaterDocument10 paginiSimulation of Shoreline Change Behind A Submerged Permeable BreakwaterSantosh KoriÎncă nu există evaluări
- Ocean Engineering: Hiroshi KagemotoDocument11 paginiOcean Engineering: Hiroshi KagemotoJoao Paiva SantosÎncă nu există evaluări
- Catamaran Wave Piercing Bow 1Document9 paginiCatamaran Wave Piercing Bow 1Akbari KarimÎncă nu există evaluări
- J. Phys. Earth, 40, 285-295, 1992Document11 paginiJ. Phys. Earth, 40, 285-295, 1992Moaz MoazÎncă nu există evaluări
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsDe la EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsÎncă nu există evaluări
- Negative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 3: Gravitational and Inertial Control, #3De la EverandNegative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 3: Gravitational and Inertial Control, #3Încă nu există evaluări
- M B P RDocument73 paginiM B P Ry_596688032Încă nu există evaluări
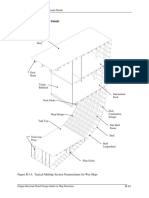
- B.5.4 Warship Structure Details: Figure B.5.4: Typical Midship Section Nomenclature For War ShipsDocument28 paginiB.5.4 Warship Structure Details: Figure B.5.4: Typical Midship Section Nomenclature For War Shipsy_596688032Încă nu există evaluări
- B.5.2 Bulk Carrier Structure Details: Figure B.5.2: Typical Midship Section Nomenclature For Bulk CarriersDocument56 paginiB.5.2 Bulk Carrier Structure Details: Figure B.5.2: Typical Midship Section Nomenclature For Bulk Carriersy_596688032Încă nu există evaluări
- Ship Operations in Cold Climate: DNV MaritimeDocument4 paginiShip Operations in Cold Climate: DNV Maritimey_596688032Încă nu există evaluări
- Fatigue-Resistant Detail Design Guide For Ship StructuresDocument79 paginiFatigue-Resistant Detail Design Guide For Ship Structuresy_596688032Încă nu există evaluări
- Fatigue-Resistant Detail Design Guide For Ship StructuresDocument6 paginiFatigue-Resistant Detail Design Guide For Ship Structuresy_596688032Încă nu există evaluări
- DNV Supports The Tanker IndustryDocument4 paginiDNV Supports The Tanker Industryy_596688032Încă nu există evaluări
- Mixed-Integer Quadrangulation: David Bommes Henrik Zimmer Leif Kobbelt RWTH Aachen UniversityDocument10 paginiMixed-Integer Quadrangulation: David Bommes Henrik Zimmer Leif Kobbelt RWTH Aachen Universityy_596688032Încă nu există evaluări
- Brosjyre Tankers - QXDDocument8 paginiBrosjyre Tankers - QXDy_596688032Încă nu există evaluări
- A Mathematical Scheme For Calculation of Lift of Planing Crafts With Large Mean Wetted Length and A Comparative Study of Effective ParametersDocument20 paginiA Mathematical Scheme For Calculation of Lift of Planing Crafts With Large Mean Wetted Length and A Comparative Study of Effective Parametersy_596688032Încă nu există evaluări
- Mixed-Integer Quadrangulation: David Bommes Henrik Zimmer Leif Kobbelt RWTH Aachen UniversityDocument10 paginiMixed-Integer Quadrangulation: David Bommes Henrik Zimmer Leif Kobbelt RWTH Aachen Universityy_596688032Încă nu există evaluări
- PublistJuly2003 tcm4-10019Document12 paginiPublistJuly2003 tcm4-10019y_596688032Încă nu există evaluări
- Finding The Hull Form For Given Seakeeping Characteristics PDFDocument8 paginiFinding The Hull Form For Given Seakeeping Characteristics PDFy_596688032Încă nu există evaluări
- 2313Document4 pagini2313y_596688032Încă nu există evaluări
- Improving Propeller Efficiency Through Tip Loading: NOVEMBER 2014Document18 paginiImproving Propeller Efficiency Through Tip Loading: NOVEMBER 2014y_596688032Încă nu există evaluări
- T1 Ikits: - Kefs Leebikmsi Information AgencyDocument51 paginiT1 Ikits: - Kefs Leebikmsi Information Agencyy_596688032Încă nu există evaluări
- Mixtures and SeparationDocument33 paginiMixtures and SeparationArvin DalisayÎncă nu există evaluări
- Power Train: - 170 - STMGXXX 4/97Document66 paginiPower Train: - 170 - STMGXXX 4/97Evan AT YoelÎncă nu există evaluări
- Method Statement Fo Reinforcement Works BlogDocument8 paginiMethod Statement Fo Reinforcement Works BlogMohasin Khan100% (1)
- Efa FitnetDocument20 paginiEfa FitnetQuoc VinhÎncă nu există evaluări
- TMG PC Strands, Wire & BarDocument10 paginiTMG PC Strands, Wire & BarHenrique Braglia PachecoÎncă nu există evaluări
- Conduction: C C C CDocument20 paginiConduction: C C C Cashok pradhanÎncă nu există evaluări
- Water Shutoff Techniques in Oil WellsDocument15 paginiWater Shutoff Techniques in Oil WellsOmar ZareefÎncă nu există evaluări
- CH 04Document52 paginiCH 04Ng Heng Lim83% (12)
- Maruti Suzuki Placement Papers-1Document3 paginiMaruti Suzuki Placement Papers-1Rabindra2416Încă nu există evaluări
- MiniProject Stage 3 - Process Dynamic & ControlDocument8 paginiMiniProject Stage 3 - Process Dynamic & ControlFarihah Eyfa100% (2)
- Mechanics of Materials - Shear Stress in Beam PDFDocument13 paginiMechanics of Materials - Shear Stress in Beam PDFDiradiva DitaÎncă nu există evaluări
- Dalian DB Pump EAP-Catalogue-English-2009Document13 paginiDalian DB Pump EAP-Catalogue-English-2009Lukarsa2013100% (1)
- Shallow Foundation - SettlementDocument31 paginiShallow Foundation - SettlementDelina TedrosÎncă nu există evaluări
- Graphene Based TextileDocument10 paginiGraphene Based TextileTaofiqur Rahman ShochchoÎncă nu există evaluări
- Indian Association of Chemistry Teachers: National Standard Examination in Chemistry (Nsec) 2018-19Document27 paginiIndian Association of Chemistry Teachers: National Standard Examination in Chemistry (Nsec) 2018-19sankalp somaniÎncă nu există evaluări
- C&zpurlin ProfileDocument8 paginiC&zpurlin ProfileRyan BeciosÎncă nu există evaluări
- Me2121 2Document12 paginiMe2121 2Wei QuanÎncă nu există evaluări
- 04 - Data Sheet - Mech Seals-Cipf Inj PumpDocument3 pagini04 - Data Sheet - Mech Seals-Cipf Inj Pumpisaac2408Încă nu există evaluări
- Matachana - AP4 - Water Treatment System For Steriliser - User ManualDocument8 paginiMatachana - AP4 - Water Treatment System For Steriliser - User ManualWahidi AzaniÎncă nu există evaluări
- ENGINE COOLANT - CHANGE - Fiat - GRANDE PUNTO - Elearn - 4CarDataDocument1 paginăENGINE COOLANT - CHANGE - Fiat - GRANDE PUNTO - Elearn - 4CarDataDevs AbdouÎncă nu există evaluări
- Sieving Methods of Sieve AnalysisDocument6 paginiSieving Methods of Sieve AnalysisAlyssa Joy Santos PaguioÎncă nu există evaluări
- Experiment #3: Sublimation and Melting Point DeterminationDocument3 paginiExperiment #3: Sublimation and Melting Point DeterminationMarthy DayagÎncă nu există evaluări
- Technology of Production of Edible Flours and Protein Products From Soybeans. Chapter 3Document19 paginiTechnology of Production of Edible Flours and Protein Products From Soybeans. Chapter 3Hamid Vahedi LarijaniÎncă nu există evaluări
- Heating & Cooling LoadsDocument66 paginiHeating & Cooling LoadsAbdullah Maqsood50% (2)
- PARTES - TurbineMeterManual212FDocument16 paginiPARTES - TurbineMeterManual212FronaldÎncă nu există evaluări
- Lesson Notes About SoundsDocument6 paginiLesson Notes About Soundsmark joseph cometaÎncă nu există evaluări
- Engineering Properties of SoilDocument30 paginiEngineering Properties of SoilChung MHÎncă nu există evaluări
- AD Krušik - Precision Casting MionicaDocument18 paginiAD Krušik - Precision Casting MionicaAnnie ToddÎncă nu există evaluări
- PI Piezoelectric Solutions Catalog PDFDocument108 paginiPI Piezoelectric Solutions Catalog PDFramuÎncă nu există evaluări
- Regenerator Reflux Pump - 2L1x2-10ARV 1Document4 paginiRegenerator Reflux Pump - 2L1x2-10ARV 1Efril dilen franciscoÎncă nu există evaluări