S-ar putea să vă placă și
- Don Casey's Complete Illustrated Sailboat Maintenance Manual: Including Inspecting the Aging Sailboat, Sailboat Hull and Deck Repair, Sailboat Refinishing, SailboDe la EverandDon Casey's Complete Illustrated Sailboat Maintenance Manual: Including Inspecting the Aging Sailboat, Sailboat Hull and Deck Repair, Sailboat Refinishing, SailboEvaluare: 4.5 din 5 stele4.5/5 (12)
- Copt ManualDocument79 paginiCopt ManualPradeep Shukla94% (17)
- Easy-to-Teach and Easy-to-Operate Arc Welding Robot-Satisfies User's Needs For Saving Space and High ProductivityDocument2 paginiEasy-to-Teach and Easy-to-Operate Arc Welding Robot-Satisfies User's Needs For Saving Space and High Productivityanh thoÎncă nu există evaluări
- Palfinger 74002 PDFDocument8 paginiPalfinger 74002 PDFAnonymous mcCJYBoÎncă nu există evaluări
- Business Events in Oracle Applications - A Sample ImplementationDocument6 paginiBusiness Events in Oracle Applications - A Sample ImplementationAshish HarbhajankaÎncă nu există evaluări
- RM 800ia (E) 01bDocument2 paginiRM 800ia (E) 01bpc100xohmÎncă nu există evaluări
- Kuka YouBot Technical Specs PDFDocument4 paginiKuka YouBot Technical Specs PDFWilliam GuarientiÎncă nu există evaluări
- ES12 BrochureDocument2 paginiES12 BrochureXanti Zabala Da RosaÎncă nu există evaluări
- CHWJ-1H Technical Data BF4L914Document5 paginiCHWJ-1H Technical Data BF4L914nikolaimendozasÎncă nu există evaluări
- M 800ia60 Flyer en PDFDocument2 paginiM 800ia60 Flyer en PDFjean.malvautÎncă nu există evaluări
- Fast, Compact and Versatile Industrial RobotDocument2 paginiFast, Compact and Versatile Industrial RobotLasermodel ServiceÎncă nu există evaluări
- 20150512051926HI Kobelco SK25SR Mini ExcavatorDocument4 pagini20150512051926HI Kobelco SK25SR Mini ExcavatorAkhmad SebehÎncă nu există evaluări
- SC700 Standard SpecificationsDocument15 paginiSC700 Standard SpecificationsXanti Zabala Da RosaÎncă nu există evaluări
- Ims Po LMDM 85R - ADocument2 paginiIms Po LMDM 85R - ATFÎncă nu există evaluări
- ARC Mate 100+D ARC Mate 120+D: Intelligent Arc Welding RobotDocument2 paginiARC Mate 100+D ARC Mate 120+D: Intelligent Arc Welding RobotJose RomeroÎncă nu există evaluări
- IRB-1410-PR10325EN - Rev.CDocument2 paginiIRB-1410-PR10325EN - Rev.CJehan AICÎncă nu există evaluări
- LW300KN: Outline DimensionsDocument4 paginiLW300KN: Outline DimensionsMyrcol RedesÎncă nu există evaluări
- Ssraen 071 006 - Sra H 01 FD11Document30 paginiSsraen 071 006 - Sra H 01 FD11Eddy AlmeidaÎncă nu există evaluări
- Teach PendantDocument1 paginăTeach PendantJorgito XdÎncă nu există evaluări
- XCMG Wheel Loader LW300KNDocument4 paginiXCMG Wheel Loader LW300KNMeliw WuÎncă nu există evaluări
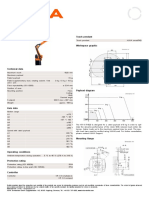
- KR 6 R500 Z200: Workspace GraphicDocument1 paginăKR 6 R500 Z200: Workspace GraphicAkechai OunsiriÎncă nu există evaluări
- Sperry Sun - Motor BookletDocument40 paginiSperry Sun - Motor BookletAnonymous pMAZFE41Tt100% (1)
- KR 6 R700 WP: Workspace GraphicDocument1 paginăKR 6 R700 WP: Workspace GraphicmohsineÎncă nu există evaluări
- Pillar and Wall-Mounted Slewing Jibs and Cranes: Workplace Effi Ciency Improvement With The Demag Crane RangeDocument22 paginiPillar and Wall-Mounted Slewing Jibs and Cranes: Workplace Effi Ciency Improvement With The Demag Crane RangemsecarÎncă nu există evaluări
- 110 Tonnes Liebherr LR1110Document32 pagini110 Tonnes Liebherr LR1110purnimaÎncă nu există evaluări
- Exclusive G-2800DXA Planetary Gear SystemDocument4 paginiExclusive G-2800DXA Planetary Gear SystemAlejandro Faundez IbacetaÎncă nu există evaluări
- IRB1520ID ROB0214EN Rev.IDocument2 paginiIRB1520ID ROB0214EN Rev.IAndrzej WojciechowskiÎncă nu există evaluări
- XGA20ACEDocument2 paginiXGA20ACEexperimental valueÎncă nu există evaluări
- Outstanding Path Accuracy: Maximum Precision andDocument2 paginiOutstanding Path Accuracy: Maximum Precision andJorge GodielÎncă nu există evaluări
- Outline Dimensions: XCMG Construction Machinery Co., LTDDocument4 paginiOutline Dimensions: XCMG Construction Machinery Co., LTD余Încă nu există evaluări
- Teach PendantDocument1 paginăTeach PendantTuấn TúÎncă nu există evaluări
- KR 6 R1820 Arc HW: Teach PendantDocument1 paginăKR 6 R1820 Arc HW: Teach PendantAHMED ghribiÎncă nu există evaluări
- KR 8 R1420 Arc HW: Teach PendantDocument1 paginăKR 8 R1420 Arc HW: Teach PendantLuis miguel Erazo leivaÎncă nu există evaluări
- S650 - Final PDFDocument2 paginiS650 - Final PDFPrashant BothraÎncă nu există evaluări
- ARC Mate 100+C: Intelligent Arc Welding RobotDocument2 paginiARC Mate 100+C: Intelligent Arc Welding Robotnemuriciu232Încă nu există evaluări
- Bunker E-BookDocument4 paginiBunker E-BookEmaxÎncă nu există evaluări
- UC ULS 140 DTFV CompressedDocument2 paginiUC ULS 140 DTFV CompressedcooluniuÎncă nu există evaluări
- LW300KN: Outline DimensionsDocument4 paginiLW300KN: Outline Dimensionsمحمود المستكاويÎncă nu există evaluări
- G9190 BrochureDocument2 paginiG9190 BrochureDody Tri SeptianÎncă nu există evaluări
- HD+ 90 VV VO en (82f)Document2 paginiHD+ 90 VV VO en (82f)james arboledaÎncă nu există evaluări
- MZ07-02 Standard SpecificationsDocument18 paginiMZ07-02 Standard SpecificationsXanti Zabala Da RosaÎncă nu există evaluări
- PC4000-6 Loading Shovel PC4000-6 BackhoeDocument8 paginiPC4000-6 Loading Shovel PC4000-6 BackhoeThakaneÎncă nu există evaluări
- Linear Ball Spline: C-Lube Linear Ball Spline MAG Linear Ball Spline G Block Type Linear Ball Spline Stroke Ball SplineDocument25 paginiLinear Ball Spline: C-Lube Linear Ball Spline MAG Linear Ball Spline G Block Type Linear Ball Spline Stroke Ball SplineMilan MikulićÎncă nu există evaluări
- Robot SCARA Cobra I600Document2 paginiRobot SCARA Cobra I600OM2019Încă nu există evaluări
- Manual ShortDocument2 paginiManual ShortViktor SokolovÎncă nu există evaluări
- Screenshot 2023-11-16 at 3.45.42 PMDocument20 paginiScreenshot 2023-11-16 at 3.45.42 PMrajeevbhardwaj20Încă nu există evaluări
- Geometric Description DH/DHM Stiffness (2) : R Ef ErencesDocument1 paginăGeometric Description DH/DHM Stiffness (2) : R Ef ErencesAyman DamounÎncă nu există evaluări
- Uc-Und 140Document2 paginiUc-Und 140cooluniuÎncă nu există evaluări
- IRB6650S 220818 DatasheetDocument2 paginiIRB6650S 220818 DatasheetJuanjoÎncă nu există evaluări
- Brosur Sany SY75CDocument2 paginiBrosur Sany SY75Cmbah petruk100% (1)
- Compact Style Precise Servo Technology: Technical Data DK-250 DK-500 DK-1000 DK-1500 DK-2500Document1 paginăCompact Style Precise Servo Technology: Technical Data DK-250 DK-500 DK-1000 DK-1500 DK-2500Iulia CostacheÎncă nu există evaluări
- DK 1008-En 04.15 13 PDFDocument1 paginăDK 1008-En 04.15 13 PDFIulia CostacheÎncă nu există evaluări
- Spec I Fi Ca Tions Hydrostatic Trans Mis Sion: Spicer Off-High Way ProductsDocument2 paginiSpec I Fi Ca Tions Hydrostatic Trans Mis Sion: Spicer Off-High Way Productshernan dueñas100% (1)
- Series: Actuators General CatalogDocument10 paginiSeries: Actuators General Catalogrieza_fÎncă nu există evaluări
- p5003drg Eng LDocument2 paginip5003drg Eng Lr.brekenÎncă nu există evaluări
- MZ04 Standard SpecificationsDocument29 paginiMZ04 Standard SpecificationsXanti Zabala Da RosaÎncă nu există evaluări
- And Versatile: Strong, CompactDocument2 paginiAnd Versatile: Strong, Compactperop123Încă nu există evaluări
- STC700C5单行本 中英文版20220727Document16 paginiSTC700C5单行本 中英文版20220727Kevin AzrialÎncă nu există evaluări
- The Complete Rigger's Apprentice: Tools and Techniques for Modern and Traditional RiggingDe la EverandThe Complete Rigger's Apprentice: Tools and Techniques for Modern and Traditional RiggingÎncă nu există evaluări
- Privacy and Data ProtectionDocument2 paginiPrivacy and Data ProtectionAloukik SharmaÎncă nu există evaluări
- PRB - 21 Sealed Beam Lamp Array: Website: EmailDocument2 paginiPRB - 21 Sealed Beam Lamp Array: Website: EmailHujÎncă nu există evaluări
- NMON - Analyser User Guide For V6.6Document34 paginiNMON - Analyser User Guide For V6.6carlosÎncă nu există evaluări
- For Refeence Only: Bell 412ep With BLR Fastfin™ SystemDocument3 paginiFor Refeence Only: Bell 412ep With BLR Fastfin™ SystemHerlambang Surya100% (1)
- Four Best Uncensored AI Art GeneratorsDocument16 paginiFour Best Uncensored AI Art Generatorsmoneygain4ever100% (1)
- PD Interview QuestionsDocument3 paginiPD Interview QuestionsChiranjeevi PandamaneniÎncă nu există evaluări
- Value1200ELCD/Value1500ELCD/Value2200ELCD User 'S Manual: Important Safety Instructions Basic OperationDocument2 paginiValue1200ELCD/Value1500ELCD/Value2200ELCD User 'S Manual: Important Safety Instructions Basic OperationDigimonÎncă nu există evaluări
- Sage Tutorial PDFDocument113 paginiSage Tutorial PDFIonut StoicaÎncă nu există evaluări
- Indian Telecom SectorDocument40 paginiIndian Telecom Sectoragrawalrohit_228384Încă nu există evaluări
- 09 SlideDocument61 pagini09 SlideAbeer MahmoudÎncă nu există evaluări
- Chapt 1 Quy Dinh Lien Quan KD XNK - Ver2020Document9 paginiChapt 1 Quy Dinh Lien Quan KD XNK - Ver2020Thy NguyễnÎncă nu există evaluări
- Assessment Ers5900Document7 paginiAssessment Ers5900Asma AsmaÎncă nu există evaluări
- Fine-Grained Food Classification Methods On TheDocument5 paginiFine-Grained Food Classification Methods On ThePavan KumarÎncă nu există evaluări
- Seminar Report ON Cloud Storage 1Document25 paginiSeminar Report ON Cloud Storage 1Krishna KhedkarÎncă nu există evaluări
- Let Us Discover: Quarter: 4 Week: 4 ELC: Perform Testing, Documentation, and Pre DeploymentDocument3 paginiLet Us Discover: Quarter: 4 Week: 4 ELC: Perform Testing, Documentation, and Pre Deploymentrianeprogod3600Încă nu există evaluări
- Real Life Startup Pitch DeckDocument55 paginiReal Life Startup Pitch DeckWalter TenecotaÎncă nu există evaluări
- Asme BPVC III D 1 NF 2015Document226 paginiAsme BPVC III D 1 NF 2015Tino OrtizÎncă nu există evaluări
- RIXL UserManualDocument29 paginiRIXL UserManualPeela NaveenÎncă nu există evaluări
- PrivateDocument774 paginiPrivateazoz alseanÎncă nu există evaluări
- New Aqua Calibration CertificateDocument20 paginiNew Aqua Calibration Certificateahmed mohamedÎncă nu există evaluări
- Power SupplyDocument15 paginiPower SupplyVelu SÎncă nu există evaluări
- CDS BIG OMEGA ® 20in. 133lb-ft K55 API Drift 18.543in.Document1 paginăCDS BIG OMEGA ® 20in. 133lb-ft K55 API Drift 18.543in.ThierryÎncă nu există evaluări
- CCNA 1 v3.0 Module 3 Networking Media: © 2003, Cisco Systems, Inc. All Rights ReservedDocument64 paginiCCNA 1 v3.0 Module 3 Networking Media: © 2003, Cisco Systems, Inc. All Rights ReservedPŘincê ÂĻĩÎncă nu există evaluări
- Grading Rubric For Commercials 1Document2 paginiGrading Rubric For Commercials 1Teacher MoÎncă nu există evaluări
- Roller Coaster Tycoon 3 ManualDocument14 paginiRoller Coaster Tycoon 3 Manualjohnlondon125Încă nu există evaluări
- Sample Integration MS 1 Level Seq 1Document3 paginiSample Integration MS 1 Level Seq 1sol heimÎncă nu există evaluări
- CHAPTER - 1 - MapReduceDocument27 paginiCHAPTER - 1 - MapReduceDhana Lakshmi BoomathiÎncă nu există evaluări
- Mic850 E Rev2Document172 paginiMic850 E Rev2donitoticoÎncă nu există evaluări