S-ar putea să vă placă și
- When Things Fall Apart PDFDocument6 paginiWhen Things Fall Apart PDFmatache valiÎncă nu există evaluări
- Friend of GodDocument2 paginiFriend of GodJeppÎncă nu există evaluări
- Surveillance Through Walls and Other Opaque MaterialsDocument5 paginiSurveillance Through Walls and Other Opaque MaterialsGcmarshall82Încă nu există evaluări
- Army 2025Document1 paginăArmy 2025ThinkDefence100% (1)
- Rafale Aircraft-The Untold Story-Part IIIDocument10 paginiRafale Aircraft-The Untold Story-Part IIIПриходько РомаÎncă nu există evaluări
- The UK Approach To Unmanned Aircraft SystemsDocument102 paginiThe UK Approach To Unmanned Aircraft SystemsthiagojiÎncă nu există evaluări
- Standard BOQ TemplateDocument4 paginiStandard BOQ TemplatePirated Soul100% (1)
- Training Report On 509 Army Base Workshop Agra CanttDocument26 paginiTraining Report On 509 Army Base Workshop Agra CanttNeelam Pari0% (1)
- Future Surface Radar Technology: From: Air Defence To Air and Missile DefenceDocument6 paginiFuture Surface Radar Technology: From: Air Defence To Air and Missile DefenceBiplob SarkerÎncă nu există evaluări
- Airborne Weather Radar: PART II: Theory & Operation For More Effective TroubleshootingDocument8 paginiAirborne Weather Radar: PART II: Theory & Operation For More Effective Troubleshootingsaravanaraj4u100% (1)
- Air To Air Refuelling Flight PlanDocument68 paginiAir To Air Refuelling Flight PlanThinkDefence100% (1)
- Eurofighter Technical Guide 2013Document30 paginiEurofighter Technical Guide 2013ThinkDefence100% (4)
- Production Weekly - Issue 1096 - Thursday, June 7, 2018 / 150 Listings - 34 PagesDocument1 paginăProduction Weekly - Issue 1096 - Thursday, June 7, 2018 / 150 Listings - 34 PagesProduction WeeklyÎncă nu există evaluări
- Airborne Imaging in 2011Document29 paginiAirborne Imaging in 2011Emil EterovićÎncă nu există evaluări
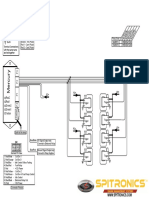
- 8cyl 8coil Ext PDFDocument1 pagină8cyl 8coil Ext PDFwallyÎncă nu există evaluări
- White Skeleton VisualizationDocument3 paginiWhite Skeleton VisualizationPeneminPolcasÎncă nu există evaluări
- Radio Control for Model Ships, Boats and AircraftDe la EverandRadio Control for Model Ships, Boats and AircraftEvaluare: 5 din 5 stele5/5 (1)
- Ship To ShoreDocument488 paginiShip To ShoreThinkDefenceÎncă nu există evaluări
- LOSAT Thermal DeviceDocument13 paginiLOSAT Thermal DeviceRasmus PeterssonÎncă nu există evaluări
- Technology Transfer Book - November 2021Document208 paginiTechnology Transfer Book - November 2021K04Anoushka TripathiÎncă nu există evaluări
- EMKITDocument21 paginiEMKITThinkDefenceÎncă nu există evaluări
- LAHAV Kfir Block 60Document27 paginiLAHAV Kfir Block 60ThinkDefence100% (2)
- Mobile and Stationary Laser Weapon Demonstrators of RheinmetallDocument9 paginiMobile and Stationary Laser Weapon Demonstrators of Rheinmetallgrindormh53Încă nu există evaluări
- Primus 660 Weather Radar PDFDocument4 paginiPrimus 660 Weather Radar PDFjorge furtado de freitasÎncă nu există evaluări
- Think Big SummaryDocument2 paginiThink Big Summaryyouandi news86% (7)
- APG-65 Radar 60Nm Range PDFDocument6 paginiAPG-65 Radar 60Nm Range PDFsvinche4354650% (2)
- P8a Navy League 0412Document16 paginiP8a Navy League 0412ThinkDefence100% (1)
- Customs of Tagalogs Reaction PaperDocument2 paginiCustoms of Tagalogs Reaction PaperKatherine Guiriba86% (86)
- New Microsoft Office Word DocumentDocument5 paginiNew Microsoft Office Word Documentajay100% (1)
- Land Based SensorsDocument40 paginiLand Based SensorsJ.MichaelLooneyÎncă nu există evaluări
- Raytheon Advanced Forward Looking Infrared (ATFLIR) PodDocument8 paginiRaytheon Advanced Forward Looking Infrared (ATFLIR) PodGeorgios Bosch100% (1)
- Valkryie Virtual MastDocument1 paginăValkryie Virtual MastThinkDefenceÎncă nu există evaluări
- 43 Military RadarsDocument15 pagini43 Military RadarsShaik Ashwaq JavedÎncă nu există evaluări
- Slides On Military RadarsDocument31 paginiSlides On Military RadarsAnandKushwaha100% (1)
- Rapid RangerDocument2 paginiRapid RangerThinkDefence100% (2)
- Silent Knight RadarDocument9 paginiSilent Knight RadarThinkDefence100% (3)
- Military RadarDocument15 paginiMilitary RadarNaresh Dandu89% (9)
- Inspection of Components With The Support of The DronesDocument6 paginiInspection of Components With The Support of The DronesF. GiacobbeÎncă nu există evaluări
- 3862 Tha Watchkeeper Brochure 2013Document5 pagini3862 Tha Watchkeeper Brochure 2013ThinkDefenceÎncă nu există evaluări
- A Study of Reconnaissance Surveillance UAVDocument99 paginiA Study of Reconnaissance Surveillance UAVJacob Issa100% (1)
- Logistics Support For The P8Document66 paginiLogistics Support For The P8ThinkDefenceÎncă nu există evaluări
- NSI-MI - Military Radome Performance and Verification TestingDocument7 paginiNSI-MI - Military Radome Performance and Verification TestingKashif KhalilÎncă nu există evaluări
- Military Radars: Raghu Guttennavar 2KL06TE024Document23 paginiMilitary Radars: Raghu Guttennavar 2KL06TE024Shreedhar Todkar100% (1)
- TPS 77Document4 paginiTPS 77UsNdaomanu100% (1)
- Baes 100639Document10 paginiBaes 100639ThinkDefenceÎncă nu există evaluări
- Military Radars: Ankit Tiwari ECE (4th Yr.) 2007UEC009Document21 paginiMilitary Radars: Ankit Tiwari ECE (4th Yr.) 2007UEC009Ankit TiwariÎncă nu există evaluări
- The Eyes of LITENINGDocument13 paginiThe Eyes of LITENINGOfek KuznikÎncă nu există evaluări
- Military Radars: Ankit Tiwari ECE (4th Yr.) 2007UEC009Document18 paginiMilitary Radars: Ankit Tiwari ECE (4th Yr.) 2007UEC009Ankit TiwariÎncă nu există evaluări
- Military Radars: B. Tech VIIDocument22 paginiMilitary Radars: B. Tech VIImayurÎncă nu există evaluări
- Ers130c1 - fps-117 V Tps-77 V Archived 04 2009Document9 paginiErs130c1 - fps-117 V Tps-77 V Archived 04 2009samirsamira928Încă nu există evaluări
- Airborne Infrared Hyperspectral Imager For Intelligence, Surveillance and Reconnaissance ApplicationsDocument12 paginiAirborne Infrared Hyperspectral Imager For Intelligence, Surveillance and Reconnaissance Applicationssamirsamira928Încă nu există evaluări
- ELCAN SpecterHR SightDocument2 paginiELCAN SpecterHR SightNORDBÎncă nu există evaluări
- 03 DevelopmentDocument32 pagini03 DevelopmentMehul MakwanÎncă nu există evaluări
- Brochure ADSDocument13 paginiBrochure ADSDevika PrasadÎncă nu există evaluări
- FMCW Vs TOF LiDARDocument9 paginiFMCW Vs TOF LiDARyjh63601Încă nu există evaluări
- 1.1 Need of Project: Fig. 1.1: Infrastructured of SensorDocument12 pagini1.1 Need of Project: Fig. 1.1: Infrastructured of SensorRam KrishnaÎncă nu există evaluări
- AeroMission-An Airborne System For Maritime SurveillanceDocument11 paginiAeroMission-An Airborne System For Maritime SurveillanceSafura Begum100% (1)
- Operation of Radar:: Military RadarsDocument17 paginiOperation of Radar:: Military RadarsMohan RaoÎncă nu există evaluări
- ReportDocument19 paginiReportKuldeep TeekasÎncă nu există evaluări
- Raytheon Usa An-Aas52Document2 paginiRaytheon Usa An-Aas52MaRlos Sian100% (1)
- DB-110 ReconnaissanceDocument2 paginiDB-110 ReconnaissanceThinkDefenceÎncă nu există evaluări
- 1MA211 0e Coexistence Test of LTE and RadarDocument36 pagini1MA211 0e Coexistence Test of LTE and RadarAlberto SaldivarÎncă nu există evaluări
- Andreu J. Farkas Manned Spacecraft Center Houston, TexasDocument38 paginiAndreu J. Farkas Manned Spacecraft Center Houston, TexasRick MendelezÎncă nu există evaluări
- كويز11 ممدوح 100%Document6 paginiكويز11 ممدوح 100%ran1955Încă nu există evaluări
- Tof System Design Part 2 Optical Design For Time of Flight Depth Sensing CamerasDocument6 paginiTof System Design Part 2 Optical Design For Time of Flight Depth Sensing Camerassikayek285Încă nu există evaluări
- SPIE 7480-17 - Giggenbach - Mobile Optical Links With Small Terminals - CopyrightDocument15 paginiSPIE 7480-17 - Giggenbach - Mobile Optical Links With Small Terminals - CopyrightJorgeÎncă nu există evaluări
- SWIR Projector BAADocument2 paginiSWIR Projector BAAcargoudelÎncă nu există evaluări
- 1992-Airborne IR Point-Detection SystemDocument14 pagini1992-Airborne IR Point-Detection SystemLK DAIÎncă nu există evaluări
- DRONES:Frame - TX-RXDocument4 paginiDRONES:Frame - TX-RXAbhishri PatilÎncă nu există evaluări
- Military RadarsDocument17 paginiMilitary RadarsAnurag ReddyÎncă nu există evaluări
- Long 1985Document11 paginiLong 1985Đinh Ngọc Việt Tùng100% (1)
- Cheytac Long Range Rifle SystemDocument25 paginiCheytac Long Range Rifle SystemGcmarshall82Încă nu există evaluări
- Phased Array Systems For Air Land and Naval Defence Applications in Selex ESDocument5 paginiPhased Array Systems For Air Land and Naval Defence Applications in Selex ESzhang yunÎncă nu există evaluări
- Toplite 1Document2 paginiToplite 1Tewelde Teklehaimanot GebreyesusÎncă nu există evaluări
- Vib - An Introduction To Using The RFDocument6 paginiVib - An Introduction To Using The RFMahmoud SobhyÎncă nu există evaluări
- Transitioning Multiagent Technology To UAV ApplicationsDocument8 paginiTransitioning Multiagent Technology To UAV ApplicationsFelipe Augusto Pérez SalazarÎncă nu există evaluări
- LidarDocument30 paginiLidarporplerpeÎncă nu există evaluări
- Department of Civil Engineering: Defence Services Technological AcademyDocument65 paginiDepartment of Civil Engineering: Defence Services Technological AcademyMinn LwinÎncă nu există evaluări
- Dronebuster Blk3 DataSheetDocument2 paginiDronebuster Blk3 DataSheetCtayÎncă nu există evaluări
- Simple Modelling of The Radar Signature of HelicoptersDocument7 paginiSimple Modelling of The Radar Signature of HelicoptersAnhs TranÎncă nu există evaluări
- Radio Remote-Control and Telemetry and Their Application to MissilesDe la EverandRadio Remote-Control and Telemetry and Their Application to MissilesEvaluare: 4 din 5 stele4/5 (1)
- Redacted Section AT3-4 Army Org InsigniaDocument151 paginiRedacted Section AT3-4 Army Org InsigniaThinkDefenceÎncă nu există evaluări
- Royal Navy 2025Document1 paginăRoyal Navy 2025ThinkDefence100% (1)
- Burma Campaign (1943)Document164 paginiBurma Campaign (1943)CAP History LibraryÎncă nu există evaluări
- Corsham Tunnel Version 1Document24 paginiCorsham Tunnel Version 1ThinkDefenceÎncă nu există evaluări
- Naval Typhoon CutawayDocument2 paginiNaval Typhoon CutawayLahore Punjab100% (1)
- UK Military Low FlyingDocument12 paginiUK Military Low FlyingThinkDefenceÎncă nu există evaluări
- 2014 04695 Galaxy Brief Redacted ScannedDocument5 pagini2014 04695 Galaxy Brief Redacted ScannedThinkDefenceÎncă nu există evaluări
- DG Ma A Air Safety Annual Report 1213Document20 paginiDG Ma A Air Safety Annual Report 1213ThinkDefenceÎncă nu există evaluări
- Final Report by The High RepresentativeHead of The EDA On EU DefenceDocument27 paginiFinal Report by The High RepresentativeHead of The EDA On EU DefenceThinkDefenceÎncă nu există evaluări
- 30 Years Down The Road: Warfighter RoundtableDocument52 pagini30 Years Down The Road: Warfighter RoundtableThinkDefence100% (1)
- TrigonDocument2 paginiTrigonThinkDefenceÎncă nu există evaluări
- Baes 060856Document2 paginiBaes 060856ThinkDefenceÎncă nu există evaluări
- Final Report by The High RepresentativeHead of The EDA On EU DefenceDocument27 paginiFinal Report by The High RepresentativeHead of The EDA On EU DefenceThinkDefenceÎncă nu există evaluări
- 112 - Defending The FutureDocument31 pagini112 - Defending The FutureThinkDefenceÎncă nu există evaluări
- Quality Assurance Assessment of The F-35 Lightning II Program (DODIG-2013-140)Document136 paginiQuality Assurance Assessment of The F-35 Lightning II Program (DODIG-2013-140)david_bober_2Încă nu există evaluări
- Defence Reform BillDocument15 paginiDefence Reform BillThinkDefenceÎncă nu există evaluări
- Vishniac's Photo Archive Lands at Magnes, Including Unseen Israel Images - Jweekly 2018.11.20Document4 paginiVishniac's Photo Archive Lands at Magnes, Including Unseen Israel Images - Jweekly 2018.11.20spagnoloachtÎncă nu există evaluări
- Questions Exercises EditDocument5 paginiQuestions Exercises EditoxygenleavesÎncă nu există evaluări
- 500 Cabinets - A Showcase of Design & CraftsmanshipDocument419 pagini500 Cabinets - A Showcase of Design & CraftsmanshipMohammed HosnyÎncă nu există evaluări
- Westminster Walk - Walk London - Google MapsDocument5 paginiWestminster Walk - Walk London - Google MapsFastalÎncă nu există evaluări
- Structural Patterns in Asante Kente-Badoe W.Document13 paginiStructural Patterns in Asante Kente-Badoe W.William BadoeÎncă nu există evaluări
- Frisius, Regnier GemmaDocument3 paginiFrisius, Regnier GemmacreeshaÎncă nu există evaluări
- CollectionDocument10 paginiCollectionqafewghtrhgfÎncă nu există evaluări
- Modified GamesDocument4 paginiModified Gamesapi-431813813Încă nu există evaluări
- Saints Sinners Mug Cake RecipeDocument1 paginăSaints Sinners Mug Cake RecipeMaryse LapointeÎncă nu există evaluări
- Notice25712 PDFDocument71 paginiNotice25712 PDFsudhir kumarÎncă nu există evaluări
- M - About THE Author - Roald DahlDocument12 paginiM - About THE Author - Roald DahlRenu SyamÎncă nu există evaluări
- Toyota Car StoriesDocument12 paginiToyota Car StoriesYudyChenÎncă nu există evaluări
- NOTES On The PERFECT Competitive Femininity in Neoliberal TimesDocument19 paginiNOTES On The PERFECT Competitive Femininity in Neoliberal Timescris asddÎncă nu există evaluări
- Contemporary Philippine Arts From The Regions: Republic Central CollegesDocument1 paginăContemporary Philippine Arts From The Regions: Republic Central CollegesJoshua BarteÎncă nu există evaluări
- Design Like You Give A Damn ReviewDocument4 paginiDesign Like You Give A Damn ReviewTânia Fernandes0% (1)
- Chapter 2 CFE 101Document23 paginiChapter 2 CFE 101ton-ton elcanoÎncă nu există evaluări
- Stormbreaker Work BookletDocument14 paginiStormbreaker Work Bookletapi-367866419Încă nu există evaluări
- Interchange 5e Level 1 Students Book Unit 15Document16 paginiInterchange 5e Level 1 Students Book Unit 15Juan Carlos PabonÎncă nu există evaluări
- Dissertation Abtract PDFDocument2 paginiDissertation Abtract PDFJuan GallasteguiÎncă nu există evaluări
- ZATHURA: A Space Adventure Activity KitDocument13 paginiZATHURA: A Space Adventure Activity KitHoughton Mifflin HarcourtÎncă nu există evaluări
- Beowulf Extension ActivitiesDocument2 paginiBeowulf Extension Activitiesapi-259906929Încă nu există evaluări
- English Marks: 70 Class: 6 (Subjective) : Q.2: Translate Passages Into Urdu of The FollowingDocument2 paginiEnglish Marks: 70 Class: 6 (Subjective) : Q.2: Translate Passages Into Urdu of The FollowingSajid HussainÎncă nu există evaluări