S-ar putea să vă placă și
- Robotics Club (Rtist)Document26 paginiRobotics Club (Rtist)Ashish MaddheshiyaÎncă nu există evaluări
- Line Follower RobotDocument10 paginiLine Follower Robotvishal groverÎncă nu există evaluări
- Arduino Line Follower Robot With QRD1114Document20 paginiArduino Line Follower Robot With QRD1114daniel_i_denev100% (1)
- Beetle BotDocument4 paginiBeetle Botnarucki2Încă nu există evaluări
- How Brushless Motors Work (BLDC Motors)Document41 paginiHow Brushless Motors Work (BLDC Motors)Chandrashekar ReddyÎncă nu există evaluări
- Line Follower SynopsisDocument14 paginiLine Follower SynopsisAshmeet SabbyÎncă nu există evaluări
- How To Build A Simple Line Tracer RobotDocument6 paginiHow To Build A Simple Line Tracer RobotaashlinnÎncă nu există evaluări
- Project 2Document11 paginiProject 2John CedrickÎncă nu există evaluări
- Line FollowerDocument13 paginiLine FollowerFarah AzamÎncă nu există evaluări
- Smartphone Controlled Arduino Rover PDFDocument30 paginiSmartphone Controlled Arduino Rover PDFWalt Whimpenny100% (1)
- Build Your Own Transistor Based Mobile Line Follower RobotDocument7 paginiBuild Your Own Transistor Based Mobile Line Follower Robotiky77Încă nu există evaluări
- Project Report: Btech-Mechanical EngineeringDocument17 paginiProject Report: Btech-Mechanical EngineeringNaveen SÎncă nu există evaluări
- Monitoare FinalDocument88 paginiMonitoare FinalCiprianIfrimÎncă nu există evaluări
- 3kg 3 ENGDocument47 pagini3kg 3 ENGRuben TecorralcoÎncă nu există evaluări
- What Is ADocument10 paginiWhat Is AsahiiiiÎncă nu există evaluări
- Line Maze Solving RobotDocument18 paginiLine Maze Solving RobotAsitha Kulasekera0% (1)
- Hector Posts Volume2Document118 paginiHector Posts Volume2Vincent J. CataldiÎncă nu există evaluări
- 4, 5, 6, and 8-Wire Stepper Motors: Step 1: Most Common EnginesDocument6 pagini4, 5, 6, and 8-Wire Stepper Motors: Step 1: Most Common EnginesNiranjan kulalÎncă nu există evaluări
- Line Follower RobotDocument16 paginiLine Follower RobotSebastian NistoricăÎncă nu există evaluări
- Motor Controllers: See My TutorialDocument9 paginiMotor Controllers: See My Tutorialkutt6tlkuÎncă nu există evaluări
- Non Programmable Line Follower RobotDocument27 paginiNon Programmable Line Follower RobotAsish Kumar Sharma100% (1)
- Stepper MotorDocument10 paginiStepper Motorgsudhanta1604Încă nu există evaluări
- Ufo CoilsDocument30 paginiUfo Coilssinergicus100% (6)
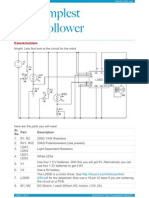
- The Simplest Line Follower: ConstructionDocument5 paginiThe Simplest Line Follower: Constructionapi-115728880Încă nu există evaluări
- Build Your Own Transistor Based Mobile Line Follower Robot (LFR) - First PartDocument6 paginiBuild Your Own Transistor Based Mobile Line Follower Robot (LFR) - First ParterfansahÎncă nu există evaluări
- Working of l293d Motor DriverDocument6 paginiWorking of l293d Motor DriverMuskan AgarwalÎncă nu există evaluări
- My Replication of Windows BendiniDocument14 paginiMy Replication of Windows BendinimaramdiÎncă nu există evaluări
- Washing Machine MotorDocument8 paginiWashing Machine Motorxavier10aÎncă nu există evaluări
- R - 09 - Robots Page9 PDFDocument5 paginiR - 09 - Robots Page9 PDFstraf238Încă nu există evaluări
- Gearbox Operation.: Power FlowDocument6 paginiGearbox Operation.: Power Flowheyram31Încă nu există evaluări
- Light Following RobotDocument7 paginiLight Following RobotAkash SrivastavÎncă nu există evaluări
- Documentation Stepper MotorDocument22 paginiDocumentation Stepper MotorsolidwormÎncă nu există evaluări
- Brushless Motor and ArduinoDocument8 paginiBrushless Motor and ArduinostellaÎncă nu există evaluări
- Robot Project JaseungDocument7 paginiRobot Project JaseungGiri MuruganÎncă nu există evaluări
- Mitsubishi Pajero Problema Freno.. Booster ElectronicoDocument42 paginiMitsubishi Pajero Problema Freno.. Booster ElectronicoVictorDjChiqueCastillo0% (1)
- Tutorial 1Document8 paginiTutorial 1Sudheshnan T SudheshÎncă nu există evaluări
- BMW 3 E46 Door Lock 51217011241Document11 paginiBMW 3 E46 Door Lock 51217011241jrgfmarquesÎncă nu există evaluări
- Function 5 OralsDocument4 paginiFunction 5 OralsAditya Arya0% (1)
- Fix IRMC MegWorkshopDocument10 paginiFix IRMC MegWorkshopsebifuente100% (4)
- Line FollowerDocument6 paginiLine FollowerD Sreeram BhargavÎncă nu există evaluări
- Jonnydavros Simple SEC Build IDocument11 paginiJonnydavros Simple SEC Build IkcarringÎncă nu există evaluări
- How Electric Motors WorkDocument7 paginiHow Electric Motors WorkBrian FanelliÎncă nu există evaluări
- Internet Kapanadze ShemyDocument37 paginiInternet Kapanadze ShemyDadang AntonÎncă nu există evaluări
- Advanced Line FollowerDocument15 paginiAdvanced Line FollowerMohtasim NakibÎncă nu există evaluări
- A Beginners Guide To RoboticsDocument9 paginiA Beginners Guide To RoboticsUdit PeAce SangwanÎncă nu există evaluări
- Project Number A3743 Autonomous Robot: Project Features: Atmega16 MicrocontrollerDocument5 paginiProject Number A3743 Autonomous Robot: Project Features: Atmega16 Microcontrollergalaxy_hypeÎncă nu există evaluări
- Project Report: Obstacle Avoiding 4WD Arduino RobotDocument12 paginiProject Report: Obstacle Avoiding 4WD Arduino RobotLahmeen HaiderÎncă nu există evaluări
- A604 To LimbDocument11 paginiA604 To LimbcesarvazquezÎncă nu există evaluări
- Troubleshoot GuideDocument4 paginiTroubleshoot Guidedenys92500Încă nu există evaluări
- Stepper Motors With ArduinoDocument19 paginiStepper Motors With Arduinochafic WEISSÎncă nu există evaluări
- Beam Mini - Sumo Wrestling EdgebotDocument13 paginiBeam Mini - Sumo Wrestling EdgebotWalter M DavidÎncă nu există evaluări
- Haywired: Pointless (Yet Awesome) Projects for the Electronically InclinedDe la EverandHaywired: Pointless (Yet Awesome) Projects for the Electronically InclinedEvaluare: 3.5 din 5 stele3.5/5 (3)
- A Guide to Motor-Cycle Design - A Collection of Vintage Articles on Motor Cycle ConstructionDe la EverandA Guide to Motor-Cycle Design - A Collection of Vintage Articles on Motor Cycle ConstructionÎncă nu există evaluări
- VHF 2003Document98 paginiVHF 2003reachbibhu88Încă nu există evaluări
- Continuous Tone-Coded Squelch System - Wikipedia, The Free Encyclopedia PDFDocument6 paginiContinuous Tone-Coded Squelch System - Wikipedia, The Free Encyclopedia PDFreachbibhu88Încă nu există evaluări
- Applicant FormDocument1 paginăApplicant Formreachbibhu88Încă nu există evaluări
- Squelch Codes PDFDocument7 paginiSquelch Codes PDFreachbibhu88Încă nu există evaluări
- LightDocument30 paginiLightreachbibhu88Încă nu există evaluări
- Online Application Form Saat 2011Document3 paginiOnline Application Form Saat 2011reachbibhu88Încă nu există evaluări
- Learning Spoken English in Half The TimeDocument86 paginiLearning Spoken English in Half The TimeΔέσποινα ΤζουτÎncă nu există evaluări
- Conformational AnalysisDocument4 paginiConformational AnalysisJinÎncă nu există evaluări
- UX-driven Heuristics For Every Designer: OutlineDocument7 paginiUX-driven Heuristics For Every Designer: OutlinemuhammadsabirinhadisÎncă nu există evaluări
- Department of Education: Republic of The PhilippinesDocument6 paginiDepartment of Education: Republic of The PhilippinesLalaine QuitoÎncă nu există evaluări
- Likert Scale Video Presentation RubricsDocument1 paginăLikert Scale Video Presentation RubricsALDWIN B. BAYLONÎncă nu există evaluări
- The Complete Guide To Installing The 44 Split Defense PDFDocument171 paginiThe Complete Guide To Installing The 44 Split Defense PDFsaid100% (1)
- Augusta Issue 1145 - The Jail ReportDocument24 paginiAugusta Issue 1145 - The Jail ReportGreg RickabaughÎncă nu există evaluări
- Growth Performance of Papaya Plants As Influenced by Organic MulchesDocument9 paginiGrowth Performance of Papaya Plants As Influenced by Organic MulchesMa. Christine Lyn AustriaÎncă nu există evaluări
- Small Molecule Modulators of PCSK9 A Litera 2018 Bioorganic Medicinal CHDocument6 paginiSmall Molecule Modulators of PCSK9 A Litera 2018 Bioorganic Medicinal CHMikeÎncă nu există evaluări
- Reconductoring Using HTLS Conductors. Case Study For A 220 KV Double Circuit Transmission LINE in RomaniaDocument7 paginiReconductoring Using HTLS Conductors. Case Study For A 220 KV Double Circuit Transmission LINE in RomaniaJose ValdiviesoÎncă nu există evaluări
- Birth AsphyxiaDocument18 paginiBirth AsphyxiaKofi Yeboah50% (2)
- Safe Use of Power Tools Rev0Document92 paginiSafe Use of Power Tools Rev0mohapatrarajÎncă nu există evaluări
- Particle FilterDocument16 paginiParticle Filterlevin696Încă nu există evaluări
- Win Darab V7 DatasheetDocument3 paginiWin Darab V7 DatasheetPatrick StivénÎncă nu există evaluări
- TOS 1st QuarterDocument6 paginiTOS 1st QuarterQuerisa Ingrid MortelÎncă nu există evaluări
- Simulado InglesDocument6 paginiSimulado InglesWandercleyson da SilvaÎncă nu există evaluări
- Lesson PlansDocument12 paginiLesson Plansapi-282722668Încă nu există evaluări
- Prepared by M Suresh Kumar, Chief Manager Faculty, SBILD HYDERABADDocument29 paginiPrepared by M Suresh Kumar, Chief Manager Faculty, SBILD HYDERABADBino JosephÎncă nu există evaluări
- 30 This Is The Tower That Frank BuiltDocument26 pagini30 This Is The Tower That Frank BuiltAlex BearishÎncă nu există evaluări
- 34P S4hana1909 BPD en UsDocument18 pagini34P S4hana1909 BPD en UsBiji RoyÎncă nu există evaluări
- Nonlinear Robust Control of High-Speed Supercavitating Vehicle in The Vertical PlaneDocument10 paginiNonlinear Robust Control of High-Speed Supercavitating Vehicle in The Vertical Planesamsaptak ghoshÎncă nu există evaluări
- The Normal DistributionDocument9 paginiThe Normal DistributionElfren BulongÎncă nu există evaluări
- Air Defence Systems: Export CatalogueDocument105 paginiAir Defence Systems: Export CatalogueserrorysÎncă nu există evaluări
- Checkpoints Before Transformer InstallationDocument3 paginiCheckpoints Before Transformer InstallationBeaBustosÎncă nu există evaluări
- Hotplate Stirrer PDFDocument1 paginăHotplate Stirrer PDFKuljinder VirdiÎncă nu există evaluări
- Module 5 - Elements of Financial StatementsDocument34 paginiModule 5 - Elements of Financial StatementsRandolph ColladoÎncă nu există evaluări
- Chapter-Communication & NetworkingDocument70 paginiChapter-Communication & NetworkingAfsar AhmedÎncă nu există evaluări
- A. in What Way Is Khatri A Surplus Unit?Document5 paginiA. in What Way Is Khatri A Surplus Unit?Aakriti SanjelÎncă nu există evaluări
- RenewalPremium 1123186Document1 paginăRenewalPremium 1123186Suhas Renu85Încă nu există evaluări
- TODO Data Sheet PDFDocument70 paginiTODO Data Sheet PDFJake ZyrusÎncă nu există evaluări