S-ar putea să vă placă și
- FAT 2022 - System DesignDocument2 paginiFAT 2022 - System DesignMadhu SudhanÎncă nu există evaluări
- (Lbycv3e) Labex 2 FormatDocument3 pagini(Lbycv3e) Labex 2 FormatDale Latrell LeeÎncă nu există evaluări
- Advances in Modelling of Mechatronic Systems: The Toolset F - C++ For The Simulation of Vehicle DynamicsDocument21 paginiAdvances in Modelling of Mechatronic Systems: The Toolset F - C++ For The Simulation of Vehicle DynamicsluisÎncă nu există evaluări
- Control Systems: InstructionsDocument4 paginiControl Systems: InstructionsRusyaidi UmarÎncă nu există evaluări
- Modeling and Control of A Car Suspension System Using P, PI, PID, GA-PID and Auto-Tuned PID Controller in Matlab/SimulinkDocument8 paginiModeling and Control of A Car Suspension System Using P, PI, PID, GA-PID and Auto-Tuned PID Controller in Matlab/SimulinkAlexander Rueda OrduzÎncă nu există evaluări
- CFD Analysis & Aerodynamic Study of A Sedan Car: (Peer-Reviewed, Open Access, Fully Refereed International Journal)Document5 paginiCFD Analysis & Aerodynamic Study of A Sedan Car: (Peer-Reviewed, Open Access, Fully Refereed International Journal)IRJMETS JOURNALÎncă nu există evaluări
- CFDanalysis Using Ansys-ModifiedDocument14 paginiCFDanalysis Using Ansys-ModifiedNarayana Addanki Machine DesignÎncă nu există evaluări
- CFDanalysis Using AnsysDocument15 paginiCFDanalysis Using AnsysNarayana Addanki Machine DesignÎncă nu există evaluări
- Updated 1Document12 paginiUpdated 1MAAZ KHANÎncă nu există evaluări
- Aerodynamics of Solar CarsDocument4 paginiAerodynamics of Solar CarsNeil WuÎncă nu există evaluări
- Repoart On Automatic Braking Sysytem 1Document29 paginiRepoart On Automatic Braking Sysytem 1VISHAL SEHRAÎncă nu există evaluări
- 5.accidental Car Impact Analysis and CFDDocument6 pagini5.accidental Car Impact Analysis and CFDprojectzfourÎncă nu există evaluări
- 16.842 Fundamentals of Systems Engineering Master Solution Mid Term ExamDocument5 pagini16.842 Fundamentals of Systems Engineering Master Solution Mid Term ExamTarik Hassan ElsonniÎncă nu există evaluări
- Design and Analyses of Car Model by CFD SoftwareDocument2 paginiDesign and Analyses of Car Model by CFD SoftwareKrishan KamtaÎncă nu există evaluări
- Simulation and Animation of Mechanical Systems: HUMUSOFT, Prague, Czech RepublicDocument11 paginiSimulation and Animation of Mechanical Systems: HUMUSOFT, Prague, Czech RepublicIrawan MalikÎncă nu există evaluări
- 054 Baykov AviaSpace 2019.editedDocument9 pagini054 Baykov AviaSpace 2019.editedRomanÎncă nu există evaluări
- Chapter 4Document13 paginiChapter 4Dudley Mosy ChifengaÎncă nu există evaluări
- Assignment 2 CS MEDocument6 paginiAssignment 2 CS MESuraj RarathÎncă nu există evaluări
- Matlab Simulation Projects For A First Course in Linear Control SystemsDocument7 paginiMatlab Simulation Projects For A First Course in Linear Control SystemsDeanneÎncă nu există evaluări
- Safety-Automation of Cars Using Embedded Microcontrollers: Abhinav Ray Varun KumarDocument6 paginiSafety-Automation of Cars Using Embedded Microcontrollers: Abhinav Ray Varun KumarDaniel Mizquero ZarateÎncă nu există evaluări
- t1 1 A Automotive 011Document13 paginit1 1 A Automotive 011rohit koraleÎncă nu există evaluări
- English TutorialDocument145 paginiEnglish Tutorialkrunal tripathiÎncă nu există evaluări
- Pi Viii 02 PDFDocument10 paginiPi Viii 02 PDFThechangemakerÎncă nu există evaluări
- JournalNX - Braking Pneumatic BumperDocument2 paginiJournalNX - Braking Pneumatic BumperJournalNX - a Multidisciplinary Peer Reviewed JournalÎncă nu există evaluări
- Sri Ramakrishna Institute of Technology, Coimbatore-10: Mechatronics QUIZ-2Document5 paginiSri Ramakrishna Institute of Technology, Coimbatore-10: Mechatronics QUIZ-2Veerakumar SÎncă nu există evaluări
- FCRAR 2012-1-2 Masory Payrard Bartlet Wright FAUDocument4 paginiFCRAR 2012-1-2 Masory Payrard Bartlet Wright FAUindrajit sodhaÎncă nu există evaluări
- B.tech r20 III Year Mech Syllabus Final WsDocument46 paginiB.tech r20 III Year Mech Syllabus Final WsRcb RcbÎncă nu există evaluări
- L (Subscript 1) Adaptive Control For Indoor Autonomous Vehicles: Design Process and Flight TestingDocument17 paginiL (Subscript 1) Adaptive Control For Indoor Autonomous Vehicles: Design Process and Flight TestingErickson OngÎncă nu există evaluări
- A CNN-Based Structure For Performance DegradationDocument13 paginiA CNN-Based Structure For Performance DegradationRafif WirareswaraÎncă nu există evaluări
- Three-Dimensional Crane Modelling and ControlDocument9 paginiThree-Dimensional Crane Modelling and ControlAna MusraÎncă nu există evaluări
- Prototype Race CarDocument9 paginiPrototype Race CarznamÎncă nu există evaluări
- Computer Aided Engineering Pritip04Document9 paginiComputer Aided Engineering Pritip04Ravi VarmanÎncă nu există evaluări
- Icmere2015 Pi 282Document8 paginiIcmere2015 Pi 282Mohamed GamalÎncă nu există evaluări
- FASTzero17 MPC4ACC 20170719Document6 paginiFASTzero17 MPC4ACC 20170719Chidananda BasavannaÎncă nu există evaluări
- Moldovanu 2020 IOP Conf. Ser. Mater. Sci. Eng. 898 012015Document6 paginiMoldovanu 2020 IOP Conf. Ser. Mater. Sci. Eng. 898 012015Duy ĐứcÎncă nu există evaluări
- Modification of Mini ProjectDocument23 paginiModification of Mini Projectvishal mishraÎncă nu există evaluări
- Mathematical Modeling of Train Dynamics - A Step Towards PC Train SimulatorDocument16 paginiMathematical Modeling of Train Dynamics - A Step Towards PC Train SimulatorLucas BarnabéÎncă nu există evaluări
- Meyer 2012 Quad Rotor SimulationDocument12 paginiMeyer 2012 Quad Rotor SimulationNicolás Ilich SamusÎncă nu există evaluări
- Modelado y Co-Simulación de Vehículos Híbridos Una Gestión TérmicaDocument18 paginiModelado y Co-Simulación de Vehículos Híbridos Una Gestión TérmicaSantiiGonzalezÎncă nu există evaluări
- Chapter 3-Pavement ManagementDocument25 paginiChapter 3-Pavement ManagementmegersalamessaÎncă nu există evaluări
- Landing GearDocument12 paginiLanding GearcmpmarinhoÎncă nu există evaluări
- Fault-Tolerant Platforms For Automotive Safety-CriDocument9 paginiFault-Tolerant Platforms For Automotive Safety-Crishubham chaudharyÎncă nu există evaluări
- APR23 CE AssignmentDocument6 paginiAPR23 CE Assignmenthazem hadeÎncă nu există evaluări
- Experimental Security Analysis of A Modern Automobile: Presented by Gaurav MastakarDocument50 paginiExperimental Security Analysis of A Modern Automobile: Presented by Gaurav MastakarIonut NicolaeÎncă nu există evaluări
- Help - Lightweight Airplane Design PDFDocument17 paginiHelp - Lightweight Airplane Design PDFxatataÎncă nu există evaluări
- On The Validation of The LS-DYNA Geo Metro NumericalDocument6 paginiOn The Validation of The LS-DYNA Geo Metro NumericalHưng HữuÎncă nu există evaluări
- Article 2Document4 paginiArticle 2Sara DhahriÎncă nu există evaluări
- LAB No.3 - CN 428 - Spring 2022Document3 paginiLAB No.3 - CN 428 - Spring 2022NURSELI KURTÎncă nu există evaluări
- VSN Ca QN PapersDocument5 paginiVSN Ca QN PaperstsÎncă nu există evaluări
- Aerodynamic PropertiesDocument10 paginiAerodynamic PropertiesDang Tien PhucÎncă nu există evaluări
- Extremum-Seeking-Based Adaptive Model-Free Control and Its Application To Automated Vehicle Path Tracking PDFDocument11 paginiExtremum-Seeking-Based Adaptive Model-Free Control and Its Application To Automated Vehicle Path Tracking PDFvivian yulie Quintero BarreraÎncă nu există evaluări
- ME8791 - Mechatronics UT-I QPDocument3 paginiME8791 - Mechatronics UT-I QPVelmurugan CÎncă nu există evaluări
- An Introduction To Computational Fluids Dynamics Professor AndersonDocument12 paginiAn Introduction To Computational Fluids Dynamics Professor AndersonAshik GRÎncă nu există evaluări
- IC CFD AnalysisDocument6 paginiIC CFD Analysispuyang48Încă nu există evaluări
- Spoiler Actuator IntegrationDocument23 paginiSpoiler Actuator IntegrationFabián AcevedoÎncă nu există evaluări
- Mechatronics Notes PDFDocument188 paginiMechatronics Notes PDFharish100% (1)
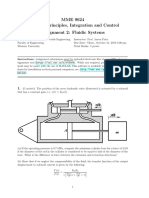
- MME 9624 Actuator Principles, Integration and Control Assignment 2: Fluidic SystemsDocument2 paginiMME 9624 Actuator Principles, Integration and Control Assignment 2: Fluidic SystemsKamal PatelÎncă nu există evaluări
- Evaluation of Antilock Braking System With An Integrated Model of Full Vehicle System DynamicsDocument32 paginiEvaluation of Antilock Braking System With An Integrated Model of Full Vehicle System DynamicsAnonim AnonimÎncă nu există evaluări
- Au 2402 QBDocument2 paginiAu 2402 QBmu_rajesh3415Încă nu există evaluări
- Kaagaz 20221111 102345319712Document17 paginiKaagaz 20221111 102345319712venkatÎncă nu există evaluări
- Workshop Brochure ES&EV NITTDocument1 paginăWorkshop Brochure ES&EV NITTvenkatÎncă nu există evaluări
- FeedbackDocument3 paginiFeedbackvenkatÎncă nu există evaluări
- Induction Gen ConnectionsDocument8 paginiInduction Gen ConnectionsvenkatÎncă nu există evaluări
- Grid Connected Induction Gen Circuit ConnectionsDocument4 paginiGrid Connected Induction Gen Circuit ConnectionsvenkatÎncă nu există evaluări
- Seminar DheekhithaDocument20 paginiSeminar DheekhithavenkatÎncă nu există evaluări
- Intel FPGA FDP BrochureDocument2 paginiIntel FPGA FDP Brochurevenkat100% (1)
- Broucher For ISTTP-2022 ModifiedDocument3 paginiBroucher For ISTTP-2022 ModifiedvenkatÎncă nu există evaluări
- Grid Connected Induction Generator Operation FinalDocument4 paginiGrid Connected Induction Generator Operation FinalvenkatÎncă nu există evaluări
- Grid Connected Induction GeneratorDocument5 paginiGrid Connected Induction GeneratorvenkatÎncă nu există evaluări
- Lec 35Document15 paginiLec 35venkatÎncă nu există evaluări
- Sallen and Key Filter Design For Second Order RC FiltersDocument14 paginiSallen and Key Filter Design For Second Order RC FiltersvenkatÎncă nu există evaluări
- The Sallen-Key Low-Pass FilterDocument10 paginiThe Sallen-Key Low-Pass FiltervenkatÎncă nu există evaluări
- Classification of Hydroelectric Power PlantsDocument6 paginiClassification of Hydroelectric Power PlantsvenkatÎncă nu există evaluări
- Parameters Which Effect Real and Reactive Power Flow: I I E X+ZDocument12 paginiParameters Which Effect Real and Reactive Power Flow: I I E X+ZvenkatÎncă nu există evaluări
- Control Systems: DC MotorDocument18 paginiControl Systems: DC MotorvenkatÎncă nu există evaluări
- Problems On Chopper Control of Separately Excited DC Motors - Electrical DrivesDocument7 paginiProblems On Chopper Control of Separately Excited DC Motors - Electrical DrivesvenkatÎncă nu există evaluări
- Design and Fabrication Power Generation Using Speed BreakerDocument25 paginiDesign and Fabrication Power Generation Using Speed BreakerAabal Sylo100% (1)
- 3.7.2.4 Orbits of Planets and SatellitesDocument55 pagini3.7.2.4 Orbits of Planets and SatellitesRutba SafdarÎncă nu există evaluări
- Statics - Vector of ForceDocument7 paginiStatics - Vector of ForceEuw ChaiwanontÎncă nu există evaluări
- Bridging Capacity and Aerodynamic Challenge of Long-Span Suspension BridgesDocument9 paginiBridging Capacity and Aerodynamic Challenge of Long-Span Suspension BridgesDan TomoiagaÎncă nu există evaluări
- Types of TorsionDocument4 paginiTypes of TorsionDECODE BDÎncă nu există evaluări
- PP Topas Blend Mech PropertiesDocument7 paginiPP Topas Blend Mech PropertiesmnsticksÎncă nu există evaluări
- Bone Fracture PDFDocument4 paginiBone Fracture PDFdavid iličićÎncă nu există evaluări
- Steam Turbine-Generator Torsional Response Due To Interaction With The Electrical GridDocument6 paginiSteam Turbine-Generator Torsional Response Due To Interaction With The Electrical GridtuxiboiÎncă nu există evaluări
- Diagnostic Exam StructDocument3 paginiDiagnostic Exam StructJejomar MotolÎncă nu există evaluări
- 1 58503 227 1 2 PDFDocument22 pagini1 58503 227 1 2 PDFDavor IlicÎncă nu există evaluări
- Performance Based Design Plenary Moehle JackDocument35 paginiPerformance Based Design Plenary Moehle JackArnel KirkÎncă nu există evaluări
- Compilation of Activities in Dynamics of Rigid Bodies: Technological Institute of The PhilippinesDocument5 paginiCompilation of Activities in Dynamics of Rigid Bodies: Technological Institute of The PhilippinesJanine Arielle DanaoÎncă nu există evaluări
- Lab 4 Mass-Spring System - v3Document13 paginiLab 4 Mass-Spring System - v3sairafiÎncă nu există evaluări
- Design Guidelines For Partially Composite BeamsDocument5 paginiDesign Guidelines For Partially Composite BeamsBhaskarÎncă nu există evaluări
- Effect of Dislocation Distribution On The Yield Stress in Ferritic SteelDocument5 paginiEffect of Dislocation Distribution On The Yield Stress in Ferritic Steelle hoangÎncă nu există evaluări
- Movement Terminology & Biomechanical Principles: Kinesiology RHS 341 Dr. Einas Al-EisaDocument29 paginiMovement Terminology & Biomechanical Principles: Kinesiology RHS 341 Dr. Einas Al-EisaIlsa ShehzadÎncă nu există evaluări
- Cantilever Beam Design - AngleDocument1 paginăCantilever Beam Design - Angleberylqz5878Încă nu există evaluări
- Stack Design CalculationDocument27 paginiStack Design Calculationrupam dey100% (6)
- Newton's Mathematical Explanations About Gravitation Galileo's Experiment On GravitationsDocument1 paginăNewton's Mathematical Explanations About Gravitation Galileo's Experiment On GravitationsKrishaÎncă nu există evaluări
- Cohesion - Geotechdata - InfoDocument2 paginiCohesion - Geotechdata - InfoSarath Chandran S100% (1)
- James I. Taylor - The Vibration Analysis Handbook (2003, VCI) - Libgen - Li-3Document1 paginăJames I. Taylor - The Vibration Analysis Handbook (2003, VCI) - Libgen - Li-3derek brainÎncă nu există evaluări
- The State of Codes On Structural Engineering in India: Ashok K. JAINDocument7 paginiThe State of Codes On Structural Engineering in India: Ashok K. JAINSadatcharaMoorthi NÎncă nu există evaluări
- PEMF Buyers Guide 2015 - Bryant MeyersDocument38 paginiPEMF Buyers Guide 2015 - Bryant MeyersVas RaÎncă nu există evaluări
- Tanks Lecture1Document69 paginiTanks Lecture1omar gutierrezÎncă nu există evaluări
- R3.105 Final Report UpdatedDocument77 paginiR3.105 Final Report UpdatedSamÎncă nu există evaluări
- H. Bombin and M.A. Martin-Delgado - Exact Topological Quantum Order in D 3 and Beyond: Branyons and Brane-Net CondensatesDocument17 paginiH. Bombin and M.A. Martin-Delgado - Exact Topological Quantum Order in D 3 and Beyond: Branyons and Brane-Net CondensatesMopadDeluxeÎncă nu există evaluări
- Elastic. 2, SchaumDocument1 paginăElastic. 2, SchaumOscar RojasÎncă nu există evaluări
- Design Considerations For A Gear DriveDocument17 paginiDesign Considerations For A Gear Driveمحمدفیضان چوہدریÎncă nu există evaluări
- Numerical and Experimental Approach For Roll Grinding ProcessDocument7 paginiNumerical and Experimental Approach For Roll Grinding ProcessGinanjar Surya RamadhanÎncă nu există evaluări
- Compare and Contrast Steady State Theory To The Big BangDocument2 paginiCompare and Contrast Steady State Theory To The Big BangGerie Kirsten Reyes86% (7)