S-ar putea să vă placă și
- Algebra VectorialDocument2 paginiAlgebra VectorialAdrian SanchezÎncă nu există evaluări
- Algebra Vectorial y Su GeometriaDocument6 paginiAlgebra Vectorial y Su Geometriacristian garciaÎncă nu există evaluări
- Calculo VectorialDocument44 paginiCalculo VectorialAldo HernandezÎncă nu există evaluări
- Álgebra VectorialDocument14 paginiÁlgebra VectorialRamon SwaageerÎncă nu există evaluări
- Geometría AnalíticaDocument7 paginiGeometría AnalíticaJules SotoÎncă nu există evaluări
- Logica MatematicaDocument27 paginiLogica MatematicaJosue RiveroÎncă nu există evaluări
- Tipos de GeometríaDocument45 paginiTipos de Geometríajulio100% (1)
- Geometría AnalíticaDocument7 paginiGeometría AnalíticaMariano Hernàndez RobledoÎncă nu există evaluări
- BrayanDocument10 paginiBrayanCesar Herrera MuñozÎncă nu există evaluări
- EnsayoDocument8 paginiEnsayoEmmanuel Alejandro Olvera LeonÎncă nu există evaluări
- U1 Calculo VectorialDocument17 paginiU1 Calculo Vectorialbryan perez valleÎncă nu există evaluări
- Cambio de CoordenadasDocument17 paginiCambio de CoordenadasMOC-3 oneÎncă nu există evaluări
- Practica 7 Vector Posicion CompletaDocument15 paginiPractica 7 Vector Posicion CompletaErwin Joel Artigas LópezÎncă nu există evaluări
- Geometria TrabajoDocument6 paginiGeometria TrabajoErnesto RojasÎncă nu există evaluări
- Introducción A La Geometria AnalíticaDocument18 paginiIntroducción A La Geometria AnalíticaasdrubalfuentesÎncă nu există evaluări
- Varios Sistemas de CoordenadasDocument41 paginiVarios Sistemas de CoordenadasAle BellettiÎncă nu există evaluări
- Coordenadas Cartesianas - Wikipedia, La Enciclopedia LibreDocument38 paginiCoordenadas Cartesianas - Wikipedia, La Enciclopedia LibreantonyÎncă nu există evaluări
- Preliminares - Matemáticas IIIDocument56 paginiPreliminares - Matemáticas IIIN Aguilar AguellesÎncă nu există evaluări
- Figuras GeométricasDocument15 paginiFiguras Geométricasvalsk22Încă nu există evaluări
- Evidencia #1 Dinamica U2Document12 paginiEvidencia #1 Dinamica U2Armando SixtoÎncă nu există evaluări
- Coordenadas CartesianasDocument7 paginiCoordenadas CartesianasMatias Sebastian Ruiz100% (1)
- El Punto en El EspacioDocument14 paginiEl Punto en El EspacioRaquel FigueroaÎncă nu există evaluări
- Conceptos Basicos de La Geometria AnaliticaDocument5 paginiConceptos Basicos de La Geometria AnaliticaSantiago SaucedaÎncă nu există evaluări
- Explicacion Metodos Numericos Aplicados Al Algebra Vectorial Jean Michael Cornelio 118-5693Document8 paginiExplicacion Metodos Numericos Aplicados Al Algebra Vectorial Jean Michael Cornelio 118-5693Maicol CornelioÎncă nu există evaluări
- Coordenadas r2 r3 PolaresDocument13 paginiCoordenadas r2 r3 Polaressosa_33680993750% (2)
- Datos Que Debe Contener Las Operaciones Registradas en El Libro DiarioDocument3 paginiDatos Que Debe Contener Las Operaciones Registradas en El Libro DiarioBryan VanegasÎncă nu există evaluări
- Trabajo 1 MateIIDocument4 paginiTrabajo 1 MateIIcelbalongoriaÎncă nu există evaluări
- Proyecto Sistemas de Coordenadas RectangularesDocument10 paginiProyecto Sistemas de Coordenadas RectangularesAna HerverthÎncă nu există evaluări
- Algebra LinealDocument13 paginiAlgebra Lineallider yoel castillo labanÎncă nu există evaluări
- Origenes de La Geometria Analitica 2Document7 paginiOrigenes de La Geometria Analitica 2Julio Cesar JimenezÎncă nu există evaluări
- Rectas y Planos en El EspacioDocument44 paginiRectas y Planos en El EspaciomayraÎncă nu există evaluări
- Unidad 1Document10 paginiUnidad 1Francisco Joel MomoxÎncă nu există evaluări
- Espacio Vectorial R3Document8 paginiEspacio Vectorial R3luci mezaÎncă nu există evaluări
- Coordenadas CartesianasDocument8 paginiCoordenadas CartesianasSaltillo RulesÎncă nu există evaluări
- Planos TridimensionalesDocument18 paginiPlanos TridimensionalesMartin Aranda TorresÎncă nu există evaluări
- Geometria AnaliticaDocument7 paginiGeometria AnaliticaPIERO ALBERTH LLANA MORALESÎncă nu există evaluări
- Coordenadas CartesianasDocument9 paginiCoordenadas CartesianasDalvinPierreÎncă nu există evaluări
- MATEMATICADocument20 paginiMATEMATICADailymar PtsÎncă nu există evaluări
- Universidad Tecnica de AmbatoDocument11 paginiUniversidad Tecnica de AmbatoAlex Nuñez RamiresÎncă nu există evaluări
- Vector UnitarioDocument22 paginiVector UnitarioJavier Suarez100% (1)
- Tarea 2 EstaticaDocument7 paginiTarea 2 EstaticaHalle Cordova KrauzeÎncă nu există evaluări
- Trabajo Segundo PeriodoDocument27 paginiTrabajo Segundo PeriodoJhon SernaÎncă nu există evaluări
- Tarea 4 LarragaDocument10 paginiTarea 4 Larragalevilarraga123Încă nu există evaluări
- Unidad 1.funciones Vectoriales - Parte 1Document107 paginiUnidad 1.funciones Vectoriales - Parte 1SasoriÎncă nu există evaluări
- Geometria y Sistema de ProyeccionDocument26 paginiGeometria y Sistema de ProyeccionRaquel Figueroa perezÎncă nu există evaluări
- Unidad 1. VectoresDocument24 paginiUnidad 1. VectoresRebeca Escobar AguilarÎncă nu există evaluări
- Fase 2 - Aplicar Conocimientos Sobre Rectas y Planos en El Espacio551122 - 03 - Trabajo Colaborativo 1Document45 paginiFase 2 - Aplicar Conocimientos Sobre Rectas y Planos en El Espacio551122 - 03 - Trabajo Colaborativo 1mayraÎncă nu există evaluări
- Coordenadas Rectangulares y GráficasDocument13 paginiCoordenadas Rectangulares y GráficasReyna Beatriz Chuc NahuatÎncă nu există evaluări
- Mat2c1 16Document10 paginiMat2c1 16David ZamoraÎncă nu există evaluări
- Plano CartesianoDocument6 paginiPlano CartesianoLesly ViguerasÎncă nu există evaluări
- Matematica AplicadaDocument22 paginiMatematica AplicadaRoberto Maiquel Briones CortezÎncă nu există evaluări
- Los Vectores en El Álgebra LinealDocument21 paginiLos Vectores en El Álgebra Linealdiego100% (2)
- GeometriaDocument7 paginiGeometriaBraulio HernandezÎncă nu există evaluări
- Jara Anthony - Sem1 - p3 - Fundamentos ConceptualesDocument2 paginiJara Anthony - Sem1 - p3 - Fundamentos ConceptualesAnthony JaraÎncă nu există evaluări
- Actividad 1Document5 paginiActividad 1Ernesto Cortés AlanísÎncă nu există evaluări
- CalculoDocument13 paginiCalculoAngel HecyreckÎncă nu există evaluări
- Clase Geometria AnalíticaDocument1 paginăClase Geometria AnalíticaAtmaro Apd23Încă nu există evaluări
- Vectores en Diferentes Sistemas de CoordenadasDocument31 paginiVectores en Diferentes Sistemas de Coordenadasaguilas,blancas100% (1)
- Sistema de Coordenadas (Trabajo)Document20 paginiSistema de Coordenadas (Trabajo)FilifordsTorresPerez100% (1)
- Presentacion - Pptx-Corte 23-04-23Document10 paginiPresentacion - Pptx-Corte 23-04-23Javier Páez hÎncă nu există evaluări
- Anexo 1 - Anexo Técnico - Lote 6Document23 paginiAnexo 1 - Anexo Técnico - Lote 6Javier Páez hÎncă nu există evaluări
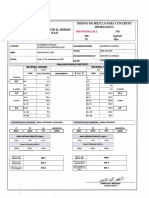
- Diseño de Mezcla 2500 Psi Hecho en Obra - Piscina Upc 2021Document12 paginiDiseño de Mezcla 2500 Psi Hecho en Obra - Piscina Upc 2021Javier Páez hÎncă nu există evaluări
- NS-010 SONDEO 4 (6m)Document34 paginiNS-010 SONDEO 4 (6m)Javier Páez hÎncă nu există evaluări
- NS-010 SONDEO 6 (25m)Document34 paginiNS-010 SONDEO 6 (25m)Javier Páez hÎncă nu există evaluări
- Memoria CaissonDocument3 paginiMemoria CaissonJavier Páez hÎncă nu există evaluări
- Resentacion Eaab-EspDocument14 paginiResentacion Eaab-EspJavier Páez hÎncă nu există evaluări
- Diseño de Mezcla 3000 Psi Bombeable - Piscina Upc 2021Document11 paginiDiseño de Mezcla 3000 Psi Bombeable - Piscina Upc 2021Javier Páez hÎncă nu există evaluări
- U1 T1 INFO ISP - Abierta - CerradDocument1 paginăU1 T1 INFO ISP - Abierta - CerradAlexander MartinezÎncă nu există evaluări
- Disenno CurricularDocument5 paginiDisenno CurricularsamaÎncă nu există evaluări
- V9n25a09 PDFDocument31 paginiV9n25a09 PDFJuan Carlos Pinto SalamancaÎncă nu există evaluări
- TallerAA3 Excel PDFDocument3 paginiTallerAA3 Excel PDFFederico HuertasÎncă nu există evaluări
- Resol 1057 de 21 08 2020 Modifica Resol 1049 de 2020 Convocatoria GraduadosDocument7 paginiResol 1057 de 21 08 2020 Modifica Resol 1049 de 2020 Convocatoria GraduadosJulieth Hernandez MoralesÎncă nu există evaluări
- Ejercicio Continuado-04 de JulioDocument40 paginiEjercicio Continuado-04 de JulioJavier Páez hÎncă nu există evaluări
- Seguimiento y Control de CalidadDocument10 paginiSeguimiento y Control de Calidadanderson crofortÎncă nu există evaluări
- 4ta Revolución IndustrialDocument1 pagină4ta Revolución IndustrialJavier Páez hÎncă nu există evaluări
- Ejercicio 5-Diseño y Construccion de TunelesDocument17 paginiEjercicio 5-Diseño y Construccion de TunelesJavier Páez hÎncă nu există evaluări
- Fisica 8 Guia 13 PDFDocument3 paginiFisica 8 Guia 13 PDFJavier Páez hÎncă nu există evaluări
- Ejercicio. Avance 4Document8 paginiEjercicio. Avance 4Javier Páez hÎncă nu există evaluări
- Seminario de Investigacion IDocument8 paginiSeminario de Investigacion IJavier Páez hÎncă nu există evaluări
- Aspectos Básicos Del SeguimientoDocument9 paginiAspectos Básicos Del SeguimientoadrianayesmithÎncă nu există evaluări
- Cuestionario Solucionado Por Los EstudiantesDocument35 paginiCuestionario Solucionado Por Los EstudiantesJavier Páez hÎncă nu există evaluări
- Alcance Del Seguimiento (II)Document10 paginiAlcance Del Seguimiento (II)rosanay0% (1)
- 01 Memoria de Calculo de TunelesDocument13 pagini01 Memoria de Calculo de TunelesJavier Páez hÎncă nu există evaluări
- Estimacion D Ela Resistencia de Macizos Rocosos en La PracticaDocument28 paginiEstimacion D Ela Resistencia de Macizos Rocosos en La Practicacototo33100% (1)
- Movimiento Rectilineo UniformeDocument18 paginiMovimiento Rectilineo UniformeJavier Páez hÎncă nu există evaluări
- Ejercicio. Avance 2Document8 paginiEjercicio. Avance 2Javier Páez hÎncă nu există evaluări
- Capítulo 2. Estabilidad de Canteras. Metodología de Análisis PDFDocument90 paginiCapítulo 2. Estabilidad de Canteras. Metodología de Análisis PDFJavier Páez hÎncă nu există evaluări
- Guia 4 - Concepto de Fuerza, Representación Matemática. Operadores Que Aumentan Fuerza La Palanca y Sus ClasesDocument5 paginiGuia 4 - Concepto de Fuerza, Representación Matemática. Operadores Que Aumentan Fuerza La Palanca y Sus ClasesJavier Páez h0% (1)
- Guía de Movimiento Rectilíneo Uniforme PDFDocument5 paginiGuía de Movimiento Rectilíneo Uniforme PDFDehny Sofia Macualo SuarezÎncă nu există evaluări
- Algeplano 130813160433 Phpapp01Document15 paginiAlgeplano 130813160433 Phpapp01Alfredo PargaÎncă nu există evaluări
- Algebra de BooleDocument14 paginiAlgebra de BooleCristian Troncoso AlarcónÎncă nu există evaluări
- Junio 2012Document19 paginiJunio 2012PedroDynaÎncă nu există evaluări
- Distancia de Un Punto A Una RectaDocument8 paginiDistancia de Un Punto A Una RectaAudielAlavezHernandezÎncă nu există evaluări
- Simulacro de AlgebraDocument3 paginiSimulacro de AlgebraTulio Ccasani EncisoÎncă nu există evaluări
- Cap I-RECTAS PLANOS Y SUPERFICIES EN R3Document1.145 paginiCap I-RECTAS PLANOS Y SUPERFICIES EN R3Wilson Contreras DelgadoÎncă nu există evaluări
- S02. S1-MaterialDocument15 paginiS02. S1-MaterialPablo Chavez BarbozaÎncă nu există evaluări
- ALGEBRA LINEAL Act 4Document5 paginiALGEBRA LINEAL Act 4Yesica Paola MAESTRE BARRIOSÎncă nu există evaluări
- Introdución A R: ÍndiceDocument10 paginiIntrodución A R: ÍndiceIsacc Delgado CanteroÎncă nu există evaluări
- Matematica 2 BGU PCA-PUD Seis UnidadesDocument38 paginiMatematica 2 BGU PCA-PUD Seis Unidadesnube bÎncă nu există evaluări
- Calculadora Sharp El-506t (640 F)Document3 paginiCalculadora Sharp El-506t (640 F)Fernando RiveroÎncă nu există evaluări
- Curso Preparación en EconometríaDocument40 paginiCurso Preparación en EconometríaRolandoAngelesEspinozaÎncă nu există evaluări
- Notación Científica 3er PDFDocument3 paginiNotación Científica 3er PDFhapkido_01Încă nu există evaluări
- Taller Calculo Integral Grupo 100411A - 764Document21 paginiTaller Calculo Integral Grupo 100411A - 764SAMyR PEREZ EDNAÎncă nu există evaluări
- Andres Diaz Carrera: Universidad Técnica de Babahoyo Facultad Ciencias Agropecuarias Ingeniería AgroindustrialDocument13 paginiAndres Diaz Carrera: Universidad Técnica de Babahoyo Facultad Ciencias Agropecuarias Ingeniería Agroindustrialevelin diaz carreraÎncă nu există evaluări
- Regresion Lineal y No LinealDocument28 paginiRegresion Lineal y No LinealCarlos Edu Chocano PhoccoÎncă nu există evaluări
- Ejercicios Algebra LinealDocument13 paginiEjercicios Algebra LinealNéstor Fabio Montoya PalaciosÎncă nu există evaluări
- Ecuaciones DiferencialesDocument11 paginiEcuaciones DiferencialesFernando Ramírez HuacaÎncă nu există evaluări
- Ejercicio Con Método de Los Mínimos CuadradosDocument4 paginiEjercicio Con Método de Los Mínimos CuadradosValentina AndreaÎncă nu există evaluări
- Algebra 23 de Abril 2017 PDFDocument44 paginiAlgebra 23 de Abril 2017 PDFJ William Mamani TitoÎncă nu există evaluări
- Polinomios Ortogonales CL Asicos de Una Variable Discreta, Su Historia, Extensiones y AplicacionesDocument20 paginiPolinomios Ortogonales CL Asicos de Una Variable Discreta, Su Historia, Extensiones y AplicacionesJuan Esteban Gonzalez SierraÎncă nu există evaluări
- Material Sesión 2 PDFDocument21 paginiMaterial Sesión 2 PDFjuan erick del aguila alvarez100% (1)
- Tarea 2 Calculo IntegralDocument12 paginiTarea 2 Calculo IntegralFredy TumiñaÎncă nu există evaluări
- 3 - 3 Símbolos de ChristoffelDocument4 pagini3 - 3 Símbolos de ChristoffelJosé Carlos ChávezÎncă nu există evaluări
- Matemáticas 7°fracciones ImpropiasDocument15 paginiMatemáticas 7°fracciones Impropiasmaria elizabethÎncă nu există evaluări
- Arévalo-Bernal-& Posada (2017) Matemáticas-Métodos Numéricos Pág 33 - 40Document8 paginiArévalo-Bernal-& Posada (2017) Matemáticas-Métodos Numéricos Pág 33 - 40Lucho suarezzÎncă nu există evaluări
- Hallar "M + N", Si Al Dividir: El Resto Resulta (2x + 3)Document7 paginiHallar "M + N", Si Al Dividir: El Resto Resulta (2x + 3)David100% (1)
- 1 Matrices SEL DeterminantesDocument34 pagini1 Matrices SEL DeterminantesJohn HughesÎncă nu există evaluări