S-ar putea să vă placă și
- Ar-2gm GPS TrackerDocument2 paginiAr-2gm GPS TrackerOscar RamirezÎncă nu există evaluări
- Usb Gps Receiver (GPS-Dongle GD-75) : FeaturesDocument2 paginiUsb Gps Receiver (GPS-Dongle GD-75) : FeaturesJasper QuitiquitÎncă nu există evaluări
- E108-GN02D User Manual: GK9501 Positioning ModuleDocument11 paginiE108-GN02D User Manual: GK9501 Positioning ModuleiflavianÎncă nu există evaluări
- AK1 Series GPS/GPRS Tracker: Product FeatureDocument2 paginiAK1 Series GPS/GPRS Tracker: Product Featuremahmod alrousanÎncă nu există evaluări
- Applications: LCV CAN Data Reading Antenna DetectionDocument3 paginiApplications: LCV CAN Data Reading Antenna DetectionNattagit jiteurtragoolÎncă nu există evaluări
- GV500Document2 paginiGV500estrada.maissaÎncă nu există evaluări
- IDD-213W Technical Specification - v1.2Document4 paginiIDD-213W Technical Specification - v1.2Utsav PatelÎncă nu există evaluări
- AR-3HU: Vehicle Recovery and Fleet ManagementDocument2 paginiAR-3HU: Vehicle Recovery and Fleet ManagementJulio MuñozÎncă nu există evaluări
- EN HCV5 DatasheetDocument3 paginiEN HCV5 Datasheetg.garciaÎncă nu există evaluări
- IDD-213GD Technical Specification v2.0 NewDocument3 paginiIDD-213GD Technical Specification v2.0 NewRamon AscanioÎncă nu există evaluări
- ( ( ( (ROM ROM ROM ROM Based) Based) Based) Based) : Data Data Data Data Sheet Sheet Sheet SheetDocument17 pagini( ( ( (ROM ROM ROM ROM Based) Based) Based) Based) : Data Data Data Data Sheet Sheet Sheet Sheetwizardgrt1Încă nu există evaluări
- EN Eco4 3G T Series DatasheetDocument3 paginiEN Eco4 3G T Series DatasheetMounder SegouatÎncă nu există evaluări
- GV 65 PlusDocument2 paginiGV 65 PlusLeonardo JuniorÎncă nu există evaluări
- The Global Connected Device: SL-1445 Provisioned by Exclusively Supported byDocument2 paginiThe Global Connected Device: SL-1445 Provisioned by Exclusively Supported byGuio GonzaÎncă nu există evaluări
- CR300Document4 paginiCR300MIGUEL FERNANDO PINILLA TORRESÎncă nu există evaluări
- Datasheet-FMC130-V 2 3Document4 paginiDatasheet-FMC130-V 2 3Dev RxÎncă nu există evaluări
- Miniature Tracking SystemDocument2 paginiMiniature Tracking SystemI QÎncă nu există evaluări
- Alarma Inteligente - EyeSiteDocument5 paginiAlarma Inteligente - EyeSiteMarco Antonio AlejoÎncă nu există evaluări
- 3.6.3 Módulo de GestiónDocument4 pagini3.6.3 Módulo de GestiónJames HsiangÎncă nu există evaluări
- Fortuna Slim GPSDocument2 paginiFortuna Slim GPSElizabeth AllenÎncă nu există evaluări
- Lampiran Tugas AkhirDocument35 paginiLampiran Tugas AkhirAsrief RizkiÎncă nu există evaluări
- DANAS ELECtrical ReprtDocument15 paginiDANAS ELECtrical ReprtRahul Nath RÎncă nu există evaluări
- Leica Viva NetRoverDocument2 paginiLeica Viva NetRoverDonovan HarrellÎncă nu există evaluări
- G V 300 Ficha TecnicaDocument2 paginiG V 300 Ficha TecnicaJose Eduardo GalarzaÎncă nu există evaluări
- Reference Station Receiver: NET-G3Document2 paginiReference Station Receiver: NET-G3Walter Huallpa RedondezÎncă nu există evaluări
- EN Trace5 DatasheetDocument3 paginiEN Trace5 DatasheetRodolfo Antonio Salas CalzadaÎncă nu există evaluări
- MT100 Technical SpecificationDocument6 paginiMT100 Technical SpecificationHirwa Jules KlutchÎncă nu există evaluări
- Navi-Track 257 BrochureDocument3 paginiNavi-Track 257 Brochurejj jjÎncă nu există evaluări
- YFT-CZ35: (Gasoline & Battery)Document5 paginiYFT-CZ35: (Gasoline & Battery)Mochamad BhadawiÎncă nu există evaluări
- Datasheet FMC130 1.8 Web TelematicsDocument3 paginiDatasheet FMC130 1.8 Web TelematicsRobin Denkins PaulÎncă nu există evaluări
- GT30C-4G 7670SA Specification-20220715Document7 paginiGT30C-4G 7670SA Specification-20220715Carlos MontalvanÎncă nu există evaluări
- 200 MK3 DataDocument4 pagini200 MK3 DatamohsinÎncă nu există evaluări
- GPS Equipos GPS SkyPatrol TT8750+ Evolution WWW - Logantech.com - MX Mérida, YucatánDocument2 paginiGPS Equipos GPS SkyPatrol TT8750+ Evolution WWW - Logantech.com - MX Mérida, YucatánLogantechÎncă nu există evaluări
- GPS Vehicle Tracker: User ManualDocument9 paginiGPS Vehicle Tracker: User ManualLionel BoopathiÎncă nu există evaluări
- Use Cases: Advanced 3G Terminal With Flexible Inputs ConfigurationDocument4 paginiUse Cases: Advanced 3G Terminal With Flexible Inputs ConfigurationAnneth OrtizÎncă nu există evaluări
- GB 735Document8 paginiGB 735ENAK9000Încă nu există evaluări
- 2u DWDM Transmission SystemDocument14 pagini2u DWDM Transmission Systemzdf1972Încă nu există evaluări
- 23151-gps GBT 709Document15 pagini23151-gps GBT 709Jose VogelÎncă nu există evaluări
- 100 MK2 DataDocument4 pagini100 MK2 DatamohsinÎncă nu există evaluări
- RN-171 802.11 B/G Wireless LANDocument16 paginiRN-171 802.11 B/G Wireless LANAnonymous 60esBJZIjÎncă nu există evaluări
- XZ000-G3 (EUSP) 1.0-Datasheet-DraftDocument5 paginiXZ000-G3 (EUSP) 1.0-Datasheet-DraftJavier Mosquera CarrilloÎncă nu există evaluări
- HWL Tracker Controller 1Document5 paginiHWL Tracker Controller 1HakanÎncă nu există evaluări
- Datasheet FMB130Document3 paginiDatasheet FMB130Frans FransÎncă nu există evaluări
- Tsi Eb-500 PDFDocument12 paginiTsi Eb-500 PDFItalo MauricioÎncă nu există evaluări
- 200 MK2 DataDocument4 pagini200 MK2 DataaliÎncă nu există evaluări
- Avancar Trias XLDocument1 paginăAvancar Trias XLRaghvendra ManiÎncă nu există evaluări
- Me 1000RW PDFDocument25 paginiMe 1000RW PDFCarlaine Martins VieiraÎncă nu există evaluări
- TrinaPro SP160 Single Axis Tracker - SingleRow - 2019A PDFDocument2 paginiTrinaPro SP160 Single Axis Tracker - SingleRow - 2019A PDFYang ZhangÎncă nu există evaluări
- Piksi Multi: Multi-Frequency, Multi-Constellation Centimeter-Accurate GNSSDocument2 paginiPiksi Multi: Multi-Frequency, Multi-Constellation Centimeter-Accurate GNSSSolomon PizzocaroÎncă nu există evaluări
- PGM 102Document2 paginiPGM 102ve3bowÎncă nu există evaluări
- S90Document4 paginiS90alejjandroÎncă nu există evaluări
- GTX-2.0 0Document2 paginiGTX-2.0 0harold_anilloÎncă nu există evaluări
- 4MCW 4TTK 4MWW 4TWKDocument11 pagini4MCW 4TTK 4MWW 4TWKguillermo granadosÎncă nu există evaluări
- Cost Effective Modern Technology: Web BasedDocument4 paginiCost Effective Modern Technology: Web BasedAdis SolakÎncă nu există evaluări
- NDS3306I 6 in 1 ISDB-T Modulator User Manual 2018.11.26Document24 paginiNDS3306I 6 in 1 ISDB-T Modulator User Manual 2018.11.26jhunniorÎncă nu există evaluări
- A.1.a. Episensor FBA ES-TDocument48 paginiA.1.a. Episensor FBA ES-TIndra ArumanÎncă nu există evaluări
- MT 4100 March 2013Document2 paginiMT 4100 March 2013Dario Gabriel Coz RojasÎncă nu există evaluări
- Ggm308uDocument14 paginiGgm308uJose VogelÎncă nu există evaluări
- CC Policy-Document LIC-s Tech-Term With-LogoDocument16 paginiCC Policy-Document LIC-s Tech-Term With-LogoDebendra nayakÎncă nu există evaluări
- Pel Positioner CBOM (10 KG)Document4 paginiPel Positioner CBOM (10 KG)Mechanical DesignÎncă nu există evaluări
- Atlas Engineering Metals HandbookDocument136 paginiAtlas Engineering Metals HandbookMatt KurtzeÎncă nu există evaluări
- Application Note: North FindingDocument4 paginiApplication Note: North FindingMechanical DesignÎncă nu există evaluări
- Free Look Period:: Life Insurance Corporation of IndiaDocument2 paginiFree Look Period:: Life Insurance Corporation of IndiaDebendra nayakÎncă nu există evaluări
- Catalogo Fulling 2016 171Document106 paginiCatalogo Fulling 2016 171Mechanical DesignÎncă nu există evaluări
- Winch Handle-SS: Ref. Code: Finish:-Title: - Part No: - MM MaterialDocument1 paginăWinch Handle-SS: Ref. Code: Finish:-Title: - Part No: - MM MaterialMechanical DesignÎncă nu există evaluări
- DIPP - IL - User ManualDocument25 paginiDIPP - IL - User ManualMechanical DesignÎncă nu există evaluări
- Stepper Motor Speed Vs PulseDocument2 paginiStepper Motor Speed Vs PulseMechanical DesignÎncă nu există evaluări
- PMAS-N2223400-147 Winch Housing For VF44 GearDocument6 paginiPMAS-N2223400-147 Winch Housing For VF44 GearMechanical DesignÎncă nu există evaluări
- Is 2770 Part 1Document15 paginiIs 2770 Part 1RajanshahsÎncă nu există evaluări
- Positioner 26-6-20Document3 paginiPositioner 26-6-20Mechanical DesignÎncă nu există evaluări
- Windload and Torque CalculationDocument7 paginiWindload and Torque CalculationMechanical DesignÎncă nu există evaluări
- Winch Pin-SS: Ref. Code: Finish:-Title: - Part No: - MM MaterialDocument1 paginăWinch Pin-SS: Ref. Code: Finish:-Title: - Part No: - MM MaterialMechanical DesignÎncă nu există evaluări
- Skills Competency Matrix FormatDocument2 paginiSkills Competency Matrix FormatMechanical DesignÎncă nu există evaluări
- A A 59745Document5 paginiA A 59745Mechanical DesignÎncă nu există evaluări
- M14 Thumb Nut: Ref. Code: Finish:-Title: - Part No: - MM MaterialDocument1 paginăM14 Thumb Nut: Ref. Code: Finish:-Title: - Part No: - MM MaterialMechanical DesignÎncă nu există evaluări
- STL Catalogue PDFDocument33 paginiSTL Catalogue PDFpreetÎncă nu există evaluări
- Random Vibration and Transient Bump Analysis of Automotive Heavy Vehicle Levelling FrameDocument18 paginiRandom Vibration and Transient Bump Analysis of Automotive Heavy Vehicle Levelling FrameIOSRjournalÎncă nu există evaluări
- 466-1-E-Quick Release Fasteners 2016Document98 pagini466-1-E-Quick Release Fasteners 2016Mechanical DesignÎncă nu există evaluări
- Final Policy Doc - LIC S New EndowmentDocument17 paginiFinal Policy Doc - LIC S New EndowmentSurya GowthamÎncă nu există evaluări
- New Positioner Milestone Matrix - Mapped-1Document8 paginiNew Positioner Milestone Matrix - Mapped-1Mechanical DesignÎncă nu există evaluări
- IS-875 - 2 - 7m MastDocument14 paginiIS-875 - 2 - 7m MastMechanical DesignÎncă nu există evaluări
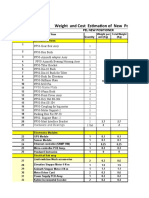
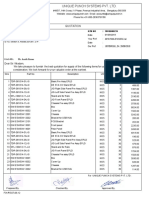
- Unique Punch Systems Pvt. LTD.: QuotationDocument2 paginiUnique Punch Systems Pvt. LTD.: QuotationMechanical DesignÎncă nu există evaluări
- Skills Competency Matrix FormatDocument2 paginiSkills Competency Matrix FormatMechanical DesignÎncă nu există evaluări
- Applications:: Introduction: The New Positioner Is Being Designed To Provide Fast and AccurateDocument4 paginiApplications:: Introduction: The New Positioner Is Being Designed To Provide Fast and AccurateMechanical DesignÎncă nu există evaluări
- Operation Manual - 18 Meter EMM (HCRR) ADTL - F 20-6-2020Document78 paginiOperation Manual - 18 Meter EMM (HCRR) ADTL - F 20-6-2020Mechanical DesignÎncă nu există evaluări
- MRT-10-V2 Manual - June 2020Document31 paginiMRT-10-V2 Manual - June 2020Mechanical DesignÎncă nu există evaluări
- Operation Manual - 18 Meter EMM (HCRR) ADTL - F 20-6-2020Document78 paginiOperation Manual - 18 Meter EMM (HCRR) ADTL - F 20-6-2020Mechanical DesignÎncă nu există evaluări
- VFD Trainer With Motor Features:: SiemensDocument6 paginiVFD Trainer With Motor Features:: Siemenshimanshu mohapatraÎncă nu există evaluări
- Pic Microcontroller Based 3 Phase Induction Motor Protection SystemDocument5 paginiPic Microcontroller Based 3 Phase Induction Motor Protection SystemNaveen ChandarÎncă nu există evaluări
- Intelli Vibev 3 C 1Document20 paginiIntelli Vibev 3 C 1adnangulgula08Încă nu există evaluări
- SP 918Document2 paginiSP 918saputraÎncă nu există evaluări
- Data Sheet 081-MGS1600GYDocument21 paginiData Sheet 081-MGS1600GYGonzalo DiazÎncă nu există evaluări
- Operating Manual: Thule Rigtech VSM 100 Linear Motion Shale ShakerDocument84 paginiOperating Manual: Thule Rigtech VSM 100 Linear Motion Shale ShakerJorge Prado DiazÎncă nu există evaluări
- DC Motor Drives 2007Document48 paginiDC Motor Drives 2007stubborn002Încă nu există evaluări
- Full Download Understanding Motor Controls 3rd Edition Herman Solutions ManualDocument34 paginiFull Download Understanding Motor Controls 3rd Edition Herman Solutions Manualyettihonomi2100% (21)
- Wa0009Document6 paginiWa0009TanmayÎncă nu există evaluări
- ABB Drives For Water and Wastewater: ACQ580, 0.75 To 500 KWDocument52 paginiABB Drives For Water and Wastewater: ACQ580, 0.75 To 500 KWElvis QuispeÎncă nu există evaluări
- WEG SSW7000 Medium Voltage Soft Starter 50031014 Brochure enDocument20 paginiWEG SSW7000 Medium Voltage Soft Starter 50031014 Brochure enMZitronÎncă nu există evaluări
- Standby 1 2 0 0 e K W 1 5 0 0 K V A 50 HZ 1500 RPM 400 VoltsDocument6 paginiStandby 1 2 0 0 e K W 1 5 0 0 K V A 50 HZ 1500 RPM 400 VoltsRainier AyapÎncă nu există evaluări
- f4 F Instruction-ManualDocument45 paginif4 F Instruction-ManualCsaba TimarÎncă nu există evaluări
- Swing Gate Manual: DR - TD.6657MDocument9 paginiSwing Gate Manual: DR - TD.6657MAntonio FaidzÎncă nu există evaluări
- Lab 2Document7 paginiLab 2bilalkhan3567Încă nu există evaluări
- 12th Physics CHP 15 Youth NotesDocument15 pagini12th Physics CHP 15 Youth Notesah0944574Încă nu există evaluări
- RR300 Recuperadora de PavimentoDocument16 paginiRR300 Recuperadora de PavimentoJulio Cesar Izquierdo MadrigalÎncă nu există evaluări
- The Electric MotorDocument3 paginiThe Electric MotorMohit PokharnaÎncă nu există evaluări
- Shinmaywa CR PDFDocument8 paginiShinmaywa CR PDFanggera91Încă nu există evaluări
- TSA ENVIRONS LTD1630kg10stop (Kohler)Document17 paginiTSA ENVIRONS LTD1630kg10stop (Kohler)khalilur rahman100% (1)
- VT0 Open Cooling Towers VT1 Open Cooling Tower: Operating and Maintenance InstructionsDocument34 paginiVT0 Open Cooling Towers VT1 Open Cooling Tower: Operating and Maintenance InstructionsoussÎncă nu există evaluări
- M.SC - in Electrical and Comp Control EngDocument36 paginiM.SC - in Electrical and Comp Control EngIslam FattouhÎncă nu există evaluări
- 10 Minutes: Operator's / Service ManualDocument24 pagini10 Minutes: Operator's / Service ManualPablo SalcedoÎncă nu există evaluări
- Troubleshooting Centrifugal Pumps July04!28!34Document7 paginiTroubleshooting Centrifugal Pumps July04!28!34ho-faÎncă nu există evaluări
- SAnet ST ReluctanceElectricM PDFDocument430 paginiSAnet ST ReluctanceElectricM PDFmarcosÎncă nu există evaluări
- 01 Entwicklung Von FEMAG Seit 2021.proFEMAG-TeamDocument22 pagini01 Entwicklung Von FEMAG Seit 2021.proFEMAG-TeamRamnik SinghÎncă nu există evaluări
- ProjectDocument52 paginiProjectSailakshmi RajanalaÎncă nu există evaluări
- Protection - of - Rotating - Machinery - Intro and ProblemsDocument5 paginiProtection - of - Rotating - Machinery - Intro and Problemsmoses kakwenaÎncă nu există evaluări
- Variador TECO PDFDocument132 paginiVariador TECO PDFCarlos Garcia GarciaÎncă nu există evaluări
- Yukti Sanchita 2021Document111 paginiYukti Sanchita 2021Tapasvi BhattÎncă nu există evaluări