S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Chevrolet Captiva 2013 PDFDocument63 paginiChevrolet Captiva 2013 PDFJuan Pablo Leon Ruales86% (21)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- How To Size and Design DuctsDocument91 paginiHow To Size and Design DuctsPrabir Bhowmik100% (1)
- Volvo 850 1997 Service ManualDocument62 paginiVolvo 850 1997 Service ManualEero AhoÎncă nu există evaluări
- Job Description - Truck DriverDocument1 paginăJob Description - Truck DriverLopchang Lopchang100% (1)
- Partlist Keeway TX 200 TX 200 Key137Document90 paginiPartlist Keeway TX 200 TX 200 Key137AzekkunÎncă nu există evaluări
- Annual-Report-FML-30-June-2020-23-Vol 3Document2 paginiAnnual-Report-FML-30-June-2020-23-Vol 3Bluish FlameÎncă nu există evaluări
- Annual-Report-FML-30-June-2020 Vol 1Document1 paginăAnnual-Report-FML-30-June-2020 Vol 1Bluish FlameÎncă nu există evaluări
- Review On Systematic Approach - To - Industrial - Oven - Improvement - For - Process - Performance - Ijariie15685Document7 paginiReview On Systematic Approach - To - Industrial - Oven - Improvement - For - Process - Performance - Ijariie15685Bluish FlameÎncă nu există evaluări
- Corporate Briefing Session 2020Document23 paginiCorporate Briefing Session 2020Bluish FlameÎncă nu există evaluări
- Appendix C: Interest and Annuity Tables For Discrete CompoundingDocument19 paginiAppendix C: Interest and Annuity Tables For Discrete CompoundingbagusibnuÎncă nu există evaluări
- Annual-Report-FML-30-June-2020-23 Vol 2Document1 paginăAnnual-Report-FML-30-June-2020-23 Vol 2Bluish FlameÎncă nu există evaluări
- 160 80-mr1Document1 pagină160 80-mr1Bluish FlameÎncă nu există evaluări
- Thermal Edge Thermal MGMT Guide Ebook FINAL 021016Document13 paginiThermal Edge Thermal MGMT Guide Ebook FINAL 021016Bluish FlameÎncă nu există evaluări
- TORQUE CONVERTER (3 - 4) RELIEF VALVE D135A-1 S - N 10001-UP Komatsu Part CatalogDocument1 paginăTORQUE CONVERTER (3 - 4) RELIEF VALVE D135A-1 S - N 10001-UP Komatsu Part CatalogBluish FlameÎncă nu există evaluări
- TORQUE CONVERTER 3TURBINE SHAFT AND STATOR D135A-1 S - N 10001-UP Komatsu Part CatalogDocument1 paginăTORQUE CONVERTER 3TURBINE SHAFT AND STATOR D135A-1 S - N 10001-UP Komatsu Part CatalogBluish FlameÎncă nu există evaluări
- TORQUE CONVERTER 4) TURBINE SHAFT AND STATOR D135A-1 S - N 10001-UP Komatsu Part CatalogDocument1 paginăTORQUE CONVERTER 4) TURBINE SHAFT AND STATOR D135A-1 S - N 10001-UP Komatsu Part CatalogBluish FlameÎncă nu există evaluări
- TORQUE CONVERTER (3 - 4) RELIEF VALVE D135A-1 S - N 10001-UP Komatsu Part CatalogDocument1 paginăTORQUE CONVERTER (3 - 4) RELIEF VALVE D135A-1 S - N 10001-UP Komatsu Part CatalogBluish FlameÎncă nu există evaluări
- TORQUE CONVERTER (2 - 4) TURBINE SHAFT AND STATOR D135A-1 S - N 10001-UP Komatsu Part CatalogDocument1 paginăTORQUE CONVERTER (2 - 4) TURBINE SHAFT AND STATOR D135A-1 S - N 10001-UP Komatsu Part CatalogBluish FlameÎncă nu există evaluări
- TORQUE CONVERTER (1 - 4) CASE D135A-1 S - N 10001-UP Komatsu Part4 Catalog PDFDocument1 paginăTORQUE CONVERTER (1 - 4) CASE D135A-1 S - N 10001-UP Komatsu Part4 Catalog PDFBluish FlameÎncă nu există evaluări
- TORQUE CONVERTER (2) TURBINE SHAFT AND STATOR D135A-1 S - N 10001-UP Komatsu Part CatalogDocument1 paginăTORQUE CONVERTER (2) TURBINE SHAFT AND STATOR D135A-1 S - N 10001-UP Komatsu Part CatalogBluish FlameÎncă nu există evaluări
- TORQUE CONVERTER (1 - 4) CASE D135A-1 S - N 10001-UP Komatsu Part Catalog5Document2 paginiTORQUE CONVERTER (1 - 4) CASE D135A-1 S - N 10001-UP Komatsu Part Catalog5Bluish FlameÎncă nu există evaluări
- ENGINE MOUNT D135A-1 S - N 10001-UP Komatsu Part Catalog PDFDocument1 paginăENGINE MOUNT D135A-1 S - N 10001-UP Komatsu Part Catalog PDFBluish FlameÎncă nu există evaluări
- The Great Book of Stupidity Part 2Document1 paginăThe Great Book of Stupidity Part 2Bluish FlameÎncă nu există evaluări
- UNIVERSAL JOINT D135A-1 S - N 10001-UP Komatsu Part CatalogDocument3 paginiUNIVERSAL JOINT D135A-1 S - N 10001-UP Komatsu Part CatalogBluish Flame0% (1)
- ENGINE MOUNT D135A-1 S - N 10001-UP Komatsu Part Catalog PDFDocument1 paginăENGINE MOUNT D135A-1 S - N 10001-UP Komatsu Part Catalog PDFBluish FlameÎncă nu există evaluări
- TORQUE CONVERTER (1 - 4) CASE D135A-1 S - N 10001-UP Komatsu Part1 CatalogDocument1 paginăTORQUE CONVERTER (1 - 4) CASE D135A-1 S - N 10001-UP Komatsu Part1 CatalogBluish FlameÎncă nu există evaluări
- TORQUE CONVERTER (1 - 4) CASE D135A-1 S - N 10001-UP Komatsu Part4 Catalog PDFDocument1 paginăTORQUE CONVERTER (1 - 4) CASE D135A-1 S - N 10001-UP Komatsu Part4 Catalog PDFBluish FlameÎncă nu există evaluări
- TORQUE CONVERTER (1 - 4) CASE D135A-1 S - N 10001-UP Komatsu Part Catalog2Document1 paginăTORQUE CONVERTER (1 - 4) CASE D135A-1 S - N 10001-UP Komatsu Part Catalog2Bluish FlameÎncă nu există evaluări
- Timing Gear Case and Flywheel Housing:: Engine LubricationDocument1 paginăTiming Gear Case and Flywheel Housing:: Engine LubricationBluish FlameÎncă nu există evaluări
- CRANK ASSEMBLY CD230 S - N 370720051 - Up Komatsu Part Catalog2 PDFDocument1 paginăCRANK ASSEMBLY CD230 S - N 370720051 - Up Komatsu Part Catalog2 PDFBluish FlameÎncă nu există evaluări
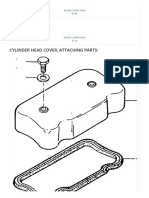
- CYLINDER HEAD COVER, ATTACHING PARTS CD230 S - N 370720051 - Up Komatsu Part CatalogDocument1 paginăCYLINDER HEAD COVER, ATTACHING PARTS CD230 S - N 370720051 - Up Komatsu Part CatalogBluish FlameÎncă nu există evaluări
- The Great Book of Stupidity Part1Document1 paginăThe Great Book of Stupidity Part1Bluish FlameÎncă nu există evaluări
- CRANK ASSEMBLY CD230 S - N 370720051 - Up Komatsu Part Catalog3Document1 paginăCRANK ASSEMBLY CD230 S - N 370720051 - Up Komatsu Part Catalog3Bluish FlameÎncă nu există evaluări
- CRANK ASSEMBLY CD230 S - N 370720051 - Up Komatsu Part Catalog3Document1 paginăCRANK ASSEMBLY CD230 S - N 370720051 - Up Komatsu Part Catalog3Bluish FlameÎncă nu există evaluări
- Electrical SystemDocument368 paginiElectrical SystemAnonymous 28jRu2jÎncă nu există evaluări
- JCB 535-95 Telescopic ForkliftDocument2 paginiJCB 535-95 Telescopic ForkliftAmbaÎncă nu există evaluări
- Product Brochure BL61B-BL71B en A 1006563Document24 paginiProduct Brochure BL61B-BL71B en A 1006563mcsputnik100% (1)
- Catalogo IVAM VALVOLE PDFDocument363 paginiCatalogo IVAM VALVOLE PDFBobCavÎncă nu există evaluări
- Handbook of Repair: Manufacturer: "Mecalac Sas"Document70 paginiHandbook of Repair: Manufacturer: "Mecalac Sas"Farid RezigÎncă nu există evaluări
- Akron Brass Catalog Echipamente PompieriDocument196 paginiAkron Brass Catalog Echipamente Pompierip_mirceaÎncă nu există evaluări
- Brakes ISO Focus 10-06-EDocument4 paginiBrakes ISO Focus 10-06-Evijay9994Încă nu există evaluări
- Drivetrain PDFDocument16 paginiDrivetrain PDFralucaralu23Încă nu există evaluări
- The Lambert Brothers': Spacious MissionDocument3 paginiThe Lambert Brothers': Spacious Missionaj filesÎncă nu există evaluări
- HSR Tuning Manual 050102Document16 paginiHSR Tuning Manual 050102tomektomek6347Încă nu există evaluări
- LSS Glosary 2020Document24 paginiLSS Glosary 2020Julian Santiago Corredor FrasserÎncă nu există evaluări
- En125 DespieceDocument76 paginiEn125 Despiecelucas godoyÎncă nu există evaluări
- Repair Parts Manual: MODEL NO. 42L17G60 (96042015802) Lawn TractorDocument40 paginiRepair Parts Manual: MODEL NO. 42L17G60 (96042015802) Lawn TractorArisa Maquinaria S,A de C,V Zamora Michocan MexicoÎncă nu există evaluări
- Thule Bike Security Document v04Document48 paginiThule Bike Security Document v04Anonymous m1cSnEavoÎncă nu există evaluări
- TNT300 Service manual-QJDocument218 paginiTNT300 Service manual-QJAlfonso MoscosoÎncă nu există evaluări
- Fram InductionDocument2 paginiFram InductionSantiago AbataÎncă nu există evaluări
- Series MotorDocument51 paginiSeries MotorGuilherme Trentin0% (1)
- Makita DCS7901Document10 paginiMakita DCS7901Marcelo Luz MatosÎncă nu există evaluări
- Curving Performaiice of Rail Passenger VehiclesDocument270 paginiCurving Performaiice of Rail Passenger VehiclesbadulagabyÎncă nu există evaluări
- Steering Column Electronics, From December 2017 (Steering Column) - ALLDATA RepairDocument6 paginiSteering Column Electronics, From December 2017 (Steering Column) - ALLDATA Repairlimbert ramos gutierrezÎncă nu există evaluări
- General Tire 2019 PDFDocument32 paginiGeneral Tire 2019 PDFLuis Eduardo PuertoÎncă nu există evaluări
- Gas Engine SeminarDocument52 paginiGas Engine SeminarGalihSucipto100% (2)
- BHT - Introduction of Helicopter Bell 407Document4 paginiBHT - Introduction of Helicopter Bell 407good dayÎncă nu există evaluări
- Primary Flight Display (PFD) Primary Flight Display (PFD)Document3 paginiPrimary Flight Display (PFD) Primary Flight Display (PFD)Anonymous QRVqOsa5Încă nu există evaluări
- Naza Ria Rover KV6 Engine Cam Marking ManualDocument7 paginiNaza Ria Rover KV6 Engine Cam Marking ManualLee Ming Fee100% (1)