S-ar putea să vă placă și
- Practical Embedded Controllers: Design and Troubleshooting with the Motorola 68HC11De la EverandPractical Embedded Controllers: Design and Troubleshooting with the Motorola 68HC11Încă nu există evaluări
- Programing Relay Time Control Using ATMEGA 328 MicrocontrollerDocument5 paginiPrograming Relay Time Control Using ATMEGA 328 MicrocontrollerIJRASETPublicationsÎncă nu există evaluări
- Final Report Corrected 1.1Document42 paginiFinal Report Corrected 1.1Anonymous IdÎncă nu există evaluări
- Automatic Solar TrackerDocument30 paginiAutomatic Solar Trackersachin tyagiÎncă nu există evaluări
- Soft Start of An Induction Motor Using DspaceDocument46 paginiSoft Start of An Induction Motor Using DspacedanÎncă nu există evaluări
- Final Report Masi VanithaaDocument75 paginiFinal Report Masi VanithaaSamraj ECEÎncă nu există evaluări
- Thyristor Based IR Remote Control For Home Applications (DC MOTOR)Document21 paginiThyristor Based IR Remote Control For Home Applications (DC MOTOR)Darshan JainÎncă nu există evaluări
- Project Finle ReportDocument54 paginiProject Finle ReportShubham EdlaÎncă nu există evaluări
- Dissertation Report Sujeet (Final Report)Document47 paginiDissertation Report Sujeet (Final Report)Surya SharmaÎncă nu există evaluări
- Performance Monitoring of Servostabilizer's Transformer and Soft Starting Using Es PDFDocument83 paginiPerformance Monitoring of Servostabilizer's Transformer and Soft Starting Using Es PDFSuryaMoorthyÎncă nu există evaluări
- "Frequency Locked Loop D.C. Motor Speed Control": Electrical & Electronics EngineeringDocument21 pagini"Frequency Locked Loop D.C. Motor Speed Control": Electrical & Electronics Engineeringkanhaiya singhÎncă nu există evaluări
- Major Project Document PDFDocument74 paginiMajor Project Document PDFPrathyusha Choudary ArumandlaÎncă nu există evaluări
- Intership Final Report (1) (1) (1) Farhan-2 2Document32 paginiIntership Final Report (1) (1) (1) Farhan-2 2Padma Reddy GÎncă nu există evaluări
- Windmill Monitoring Final - DocumentDocument63 paginiWindmill Monitoring Final - Documentsalai Thillai ECEÎncă nu există evaluări
- A Major Project Report: Bachelor of TechnologyDocument57 paginiA Major Project Report: Bachelor of TechnologyMy StyleÎncă nu există evaluări
- Iot Based Biometric Attendance System Using ArduinoDocument108 paginiIot Based Biometric Attendance System Using Arduinoviju001Încă nu există evaluări
- Automatic Gas Leakage Detection and Alarming System Using Esp8266 and Mq6 Gas SensorDocument51 paginiAutomatic Gas Leakage Detection and Alarming System Using Esp8266 and Mq6 Gas SensorSafi KumarÎncă nu există evaluări
- Report of IoT Based Power Theft Detection System (01 Suit)Document49 paginiReport of IoT Based Power Theft Detection System (01 Suit)sumit.copy12Încă nu există evaluări
- GSM Based Motor Control: A Mini Project Report OnDocument94 paginiGSM Based Motor Control: A Mini Project Report Onsra1 reddyÎncă nu există evaluări
- IOT Based Underground Cable Fault Detection SystemDocument51 paginiIOT Based Underground Cable Fault Detection SystemSharma AnandanÎncă nu există evaluări
- CFD Analysis and Parameter Optimization of Convergent Divergent Nozzle.Document35 paginiCFD Analysis and Parameter Optimization of Convergent Divergent Nozzle.Navjeet MeshramÎncă nu există evaluări
- Dr. Ambedkar Institute of TechnologyDocument8 paginiDr. Ambedkar Institute of TechnologySuresh SuriÎncă nu există evaluări
- A Project Report On Aurdino Based Radar System Using Ultrasonic SensorDocument64 paginiA Project Report On Aurdino Based Radar System Using Ultrasonic SensorAdithyaÎncă nu există evaluări
- Report Door OpenerDocument52 paginiReport Door OpenerREOTIPUR MINI MUMBAIÎncă nu există evaluări
- Battery Monitoring System For A PV Inverter With Solar TrackingDocument20 paginiBattery Monitoring System For A PV Inverter With Solar TrackingSujithaÎncă nu există evaluări
- Major - Project FileDocument55 paginiMajor - Project FileGaurav DwivediÎncă nu există evaluări
- Power System Stability Analysis by Applying PSS in ETAPDocument32 paginiPower System Stability Analysis by Applying PSS in ETAPSayed SaadÎncă nu există evaluări
- Design and Implementation of Microcontroller Based Propeller ClockDocument9 paginiDesign and Implementation of Microcontroller Based Propeller ClockPREM RAJÎncă nu există evaluări
- Design and Development of Solar Charge Controller With Sun TrackingDocument22 paginiDesign and Development of Solar Charge Controller With Sun TrackingManoj SyÎncă nu există evaluări
- Password Based Circuit Breaker: International Journal For Research in Applied Science & Engineering Technology (IJRASET)Document5 paginiPassword Based Circuit Breaker: International Journal For Research in Applied Science & Engineering Technology (IJRASET)DeyaSuryadirajaÎncă nu există evaluări
- JBR 1920 2Document49 paginiJBR 1920 2Subhan AfridiÎncă nu există evaluări
- IOT Based Patient Health MonitoringDocument52 paginiIOT Based Patient Health Monitoringरोहित यदुवंशीÎncă nu există evaluări
- Contact-less Digital TachometerDocument61 paginiContact-less Digital TachometernavyaÎncă nu există evaluări
- Iot Based On Device Fault Detection Final Report 8TH SEMDocument40 paginiIot Based On Device Fault Detection Final Report 8TH SEMChimanlal PatelÎncă nu există evaluări
- Index of Code LockDocument7 paginiIndex of Code LockChirag MistryÎncă nu există evaluări
- Design and Fabrication of Smart Electromagnetic Breaking SystemDocument9 paginiDesign and Fabrication of Smart Electromagnetic Breaking SystemIJRASETPublicationsÎncă nu există evaluări
- Design of an LED Display Using Solar EnergyDocument73 paginiDesign of an LED Display Using Solar EnergyAnuja VaishnavÎncă nu există evaluări
- Substation Monitoring SystemDocument6 paginiSubstation Monitoring SystemIJRASETPublicationsÎncă nu există evaluări
- Capstone ProjectDocument43 paginiCapstone ProjectChetanModiÎncă nu există evaluări
- Design and Development of SPM For Nut SortingDocument8 paginiDesign and Development of SPM For Nut SortingIJRASETPublicationsÎncă nu există evaluări
- Minor Project Report 1Document26 paginiMinor Project Report 1Shanid PrasadÎncă nu există evaluări
- GR14Document47 paginiGR14dean odeanÎncă nu există evaluări
- Alcohol Sensing Engine Locking SystemDocument78 paginiAlcohol Sensing Engine Locking SystemAKESH REDDYÎncă nu există evaluări
- Monitoring Autism with IoT SensorsDocument79 paginiMonitoring Autism with IoT SensorsSTAR E WORLDÎncă nu există evaluări
- Paper 8885Document5 paginiPaper 8885IJARSCT JournalÎncă nu există evaluări
- Project Report on Arduino Smoke DetectorDocument67 paginiProject Report on Arduino Smoke DetectorDheerajÎncă nu există evaluări
- Final23 12karthikDocument38 paginiFinal23 12karthikKarthikVijayÎncă nu există evaluări
- GG 2018-19_BDocument62 paginiGG 2018-19_BrenukarupsÎncă nu există evaluări
- Automatic Control of Street Lights: Bachelor of Engineering in Electrical and Electronics EngineeringDocument8 paginiAutomatic Control of Street Lights: Bachelor of Engineering in Electrical and Electronics Engineeringcity cyberÎncă nu există evaluări
- Ir Transmitter and Receiver Switch: Electrical EngineeringDocument24 paginiIr Transmitter and Receiver Switch: Electrical EngineeringAkash RathodÎncă nu există evaluări
- Nikki ProjectDocument31 paginiNikki ProjectshaikaneeshashaikaneeshaÎncă nu există evaluări
- AC2DCDocument52 paginiAC2DCTamal SinghaÎncă nu există evaluări
- The Electricity Billing System Over IOTDocument7 paginiThe Electricity Billing System Over IOTIJRASETPublicationsÎncă nu există evaluări
- Mini Project ReportDocument29 paginiMini Project ReportjosephÎncă nu există evaluări
- Project ReportDocument69 paginiProject ReportAkhilesh Saini100% (1)
- Iot Based Street Light Management System: Technical Review SeminarDocument12 paginiIot Based Street Light Management System: Technical Review SeminarAtchut Kumar ChadaramÎncă nu există evaluări
- Tuning PID Controller for Higher Order SystemsDocument58 paginiTuning PID Controller for Higher Order SystemsMainul BaikkaÎncă nu există evaluări
- Report On Scada Based ProjectDocument38 paginiReport On Scada Based ProjectAictDurgapurÎncă nu există evaluări
- DC Motor Speed Controller Design Using Pulse WidthDocument12 paginiDC Motor Speed Controller Design Using Pulse WidthHerman BachtiarÎncă nu există evaluări
- Automated Solar Power System Project Report 1Document23 paginiAutomated Solar Power System Project Report 1Karan MehraÎncă nu există evaluări
- Raghu Institute of Technology: (Autonomous)Document16 paginiRaghu Institute of Technology: (Autonomous)Ram SankarÎncă nu există evaluări
- Tidal Energy Scope of FutureDocument14 paginiTidal Energy Scope of Futurenirmala M.S.Încă nu există evaluări
- BLDC Controller DesignDocument11 paginiBLDC Controller DesignAyyar KandasamyÎncă nu există evaluări
- BLDC Controller DesignDocument11 paginiBLDC Controller DesignAyyar KandasamyÎncă nu există evaluări
- Variable Frequency Transformer Paper ArezkiDocument9 paginiVariable Frequency Transformer Paper ArezkiRam SankarÎncă nu există evaluări
- Solar Thermal Seminar Report Submitted By: To Raghu Institute of TechnologyDocument45 paginiSolar Thermal Seminar Report Submitted By: To Raghu Institute of TechnologyRam SankarÎncă nu există evaluări
- Tidal EnergyDocument1 paginăTidal EnergyChandra KanthÎncă nu există evaluări
- 11 - Chapter 3Document25 pagini11 - Chapter 3Ram SankarÎncă nu există evaluări
- Solar Thermal Seminar Report Submitted By: To Raghu Institute of TechnologyDocument45 paginiSolar Thermal Seminar Report Submitted By: To Raghu Institute of TechnologyRam SankarÎncă nu există evaluări
- Solar Thermal Seminar Report Submitted By: To Raghu Institute of TechnologyDocument45 paginiSolar Thermal Seminar Report Submitted By: To Raghu Institute of TechnologyRam SankarÎncă nu există evaluări
- HR QuestionsDocument38 paginiHR QuestionsRam SankarÎncă nu există evaluări
- Speed Control of AC Motor Using GSMDocument5 paginiSpeed Control of AC Motor Using GSMRam SankarÎncă nu există evaluări
- Eem 130304033503 Phpapp02Document20 paginiEem 130304033503 Phpapp02Ram SankarÎncă nu există evaluări
- Eem 130304033503 Phpapp02Document20 paginiEem 130304033503 Phpapp02Ram SankarÎncă nu există evaluări
- Active FilterDocument16 paginiActive FilterRam SankarÎncă nu există evaluări
- Eem 130304033503 Phpapp02Document20 paginiEem 130304033503 Phpapp02Ram SankarÎncă nu există evaluări
- 5000qenglish-Www Qmaths in PDFDocument250 pagini5000qenglish-Www Qmaths in PDFSukram AryaÎncă nu există evaluări
- Wipro PDFDocument31 paginiWipro PDFvenugopal mallaÎncă nu există evaluări
- Unit-IV SSD PDFDocument22 paginiUnit-IV SSD PDFRam SankarÎncă nu există evaluări
- Netstal SYNERGY 800-230: Injection Moulding MachineDocument9 paginiNetstal SYNERGY 800-230: Injection Moulding MachinePiman MiriÎncă nu există evaluări
- The Z-80 Microcomputer Handbook - William BardenDocument297 paginiThe Z-80 Microcomputer Handbook - William BardenMarcMichael77Încă nu există evaluări
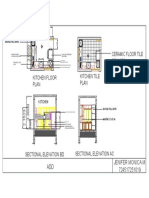
- Kitchen ModelDocument1 paginăKitchen ModelJenifer MonicaÎncă nu există evaluări
- Types of Single Phase Induction Motors GuideDocument13 paginiTypes of Single Phase Induction Motors GuidewazidulÎncă nu există evaluări
- Homework of Chapter 5Document7 paginiHomework of Chapter 5Deon ChenÎncă nu există evaluări
- Toyota Celica GT4 ST165 ECU Pin Out and Wiring DiagramDocument3 paginiToyota Celica GT4 ST165 ECU Pin Out and Wiring DiagramSirleh SalehÎncă nu există evaluări
- CV FormatDocument2 paginiCV FormatTehmas KamranÎncă nu există evaluări
- GMI Student ReportDocument3 paginiGMI Student ReportdmufqiÎncă nu există evaluări
- 2015 K2500 ManualDocument283 pagini2015 K2500 ManualRinto SilalahiÎncă nu există evaluări
- KTR - 02 Tooth Gear CouplingsDocument34 paginiKTR - 02 Tooth Gear CouplingsMišo SavčićÎncă nu există evaluări
- Ohio Magnetics - Scap Handling Magnets Tech Info - WebDocument4 paginiOhio Magnetics - Scap Handling Magnets Tech Info - WebLouis ArringtonÎncă nu există evaluări
- Piston Engine FundamentalDocument62 paginiPiston Engine Fundamentalkp subedi100% (1)
- 600/1000V Cu/PVC cable technical data sheetDocument1 pagină600/1000V Cu/PVC cable technical data sheetCiwa DoankÎncă nu există evaluări
- Easygen-1700: ManualDocument146 paginiEasygen-1700: Manualangel aguilar50% (2)
- Pic 16 C 54 CDocument5 paginiPic 16 C 54 Ccuaco_ibm5328Încă nu există evaluări
- 12 Volt Bar-Mount Chain Saw Sharpener Owner'S Manual: Item # 141259Document8 pagini12 Volt Bar-Mount Chain Saw Sharpener Owner'S Manual: Item # 141259Relyax ColiliÎncă nu există evaluări
- t420 ThinkpadDocument11 paginit420 ThinkpadDwi RachmatÎncă nu există evaluări
- Manual de Partes ST1010 - 369 PDFDocument424 paginiManual de Partes ST1010 - 369 PDFCesar Chavez100% (2)
- BMW 318-Series 1991Document9 paginiBMW 318-Series 1991Piotr JaworskiÎncă nu există evaluări
- Reflective Optical Beam Smoke Detector User GuideDocument8 paginiReflective Optical Beam Smoke Detector User GuidejolymolyÎncă nu există evaluări
- JCB 8080 Midi Excavator Service Repair Manual SN1024000 Onwards PDFDocument17 paginiJCB 8080 Midi Excavator Service Repair Manual SN1024000 Onwards PDFhfjksekmmdm44% (9)
- 94 Shooting-BoardDocument6 pagini94 Shooting-Boardbjørn vidar andersenÎncă nu există evaluări
- App 1238 PDFDocument3 paginiApp 1238 PDFIBRÎncă nu există evaluări
- Grove GMK 4075-1 Crawler Crane for Sale in PhilippinesDocument1 paginăGrove GMK 4075-1 Crawler Crane for Sale in PhilippinesMiguel Avella BelloÎncă nu există evaluări
- SM190003EN - 022011 - LR - Infusion Systems Product CatalogDocument44 paginiSM190003EN - 022011 - LR - Infusion Systems Product CatalogmochkurniawanÎncă nu există evaluări
- Manual Sayari Oil ExpellerDocument12 paginiManual Sayari Oil ExpellerFrancis DimeÎncă nu există evaluări
- Owner's Manual: Panel DescriptionsDocument1 paginăOwner's Manual: Panel Descriptionsljputman09Încă nu există evaluări
- RIT Models For LTSPICEDocument3 paginiRIT Models For LTSPICEDavid Villamarin RiveraÎncă nu există evaluări
- 12-2218-r01 (59552105) SP5Document11 pagini12-2218-r01 (59552105) SP5Brad KerrÎncă nu există evaluări
- Citizen A16VI Machine SpecificationsDocument2 paginiCitizen A16VI Machine SpecificationscmganklÎncă nu există evaluări
- Chip War: The Quest to Dominate the World's Most Critical TechnologyDe la EverandChip War: The Quest to Dominate the World's Most Critical TechnologyEvaluare: 4.5 din 5 stele4.5/5 (227)
- Dancing with Qubits: How quantum computing works and how it can change the worldDe la EverandDancing with Qubits: How quantum computing works and how it can change the worldEvaluare: 5 din 5 stele5/5 (1)
- iPhone Photography: A Ridiculously Simple Guide To Taking Photos With Your iPhoneDe la EverandiPhone Photography: A Ridiculously Simple Guide To Taking Photos With Your iPhoneÎncă nu există evaluări
- Model-based System and Architecture Engineering with the Arcadia MethodDe la EverandModel-based System and Architecture Engineering with the Arcadia MethodÎncă nu există evaluări
- Chip War: The Fight for the World's Most Critical TechnologyDe la EverandChip War: The Fight for the World's Most Critical TechnologyEvaluare: 4.5 din 5 stele4.5/5 (82)
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002De la EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Evaluare: 5 din 5 stele5/5 (1)
- 8051 Microcontroller: An Applications Based IntroductionDe la Everand8051 Microcontroller: An Applications Based IntroductionEvaluare: 5 din 5 stele5/5 (6)
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102De la EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Evaluare: 5 din 5 stele5/5 (2)
- Amazon Web Services (AWS) Interview Questions and AnswersDe la EverandAmazon Web Services (AWS) Interview Questions and AnswersEvaluare: 4.5 din 5 stele4.5/5 (3)
- Tor Darknet Bundle: Master the Art of InvisibilityDe la EverandTor Darknet Bundle: Master the Art of InvisibilityÎncă nu există evaluări
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XDe la EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XEvaluare: 3 din 5 stele3/5 (2)
- Hacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxDe la EverandHacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxÎncă nu există evaluări
- The No Bull$#!£ Guide to Building Your Own PC: No Bull GuidesDe la EverandThe No Bull$#!£ Guide to Building Your Own PC: No Bull GuidesÎncă nu există evaluări
- Computer Science: A Concise IntroductionDe la EverandComputer Science: A Concise IntroductionEvaluare: 4.5 din 5 stele4.5/5 (14)
- Samsung Galaxy S20 Learners Guide: A Comprehensive Manual to Help You Master Your Samsung Galaxy S20 and S20 Series like a ProDe la EverandSamsung Galaxy S20 Learners Guide: A Comprehensive Manual to Help You Master Your Samsung Galaxy S20 and S20 Series like a ProÎncă nu există evaluări
- Creative Selection: Inside Apple's Design Process During the Golden Age of Steve JobsDe la EverandCreative Selection: Inside Apple's Design Process During the Golden Age of Steve JobsEvaluare: 4.5 din 5 stele4.5/5 (49)
- Embedded Systems: ARM Programming and OptimizationDe la EverandEmbedded Systems: ARM Programming and OptimizationÎncă nu există evaluări
- 2018 (40+) Best Free Apps for Kindle Fire Tablets: +Simple Step-by-Step Guide For New Kindle Fire UsersDe la Everand2018 (40+) Best Free Apps for Kindle Fire Tablets: +Simple Step-by-Step Guide For New Kindle Fire UsersÎncă nu există evaluări