S-ar putea să vă placă și
- Introduction To Device Trees PDFDocument34 paginiIntroduction To Device Trees PDFm3y54mÎncă nu există evaluări
- Linux Driver Development For Embedded Processors: ST STM32MP1 Practical Labs SetupDocument22 paginiLinux Driver Development For Embedded Processors: ST STM32MP1 Practical Labs SetupRonaldMartinezÎncă nu există evaluări
- Fujitsu ARM Cortex Design SupportDocument2 paginiFujitsu ARM Cortex Design SupportFujitsu Semiconductor EuropeÎncă nu există evaluări
- Comparative Study of 32 Bit MicroprocessorsDocument13 paginiComparative Study of 32 Bit MicroprocessorsRahul MishraÎncă nu există evaluări
- Petazzoni Device Tree DummiesDocument45 paginiPetazzoni Device Tree DummiesNelson KigenÎncă nu există evaluări
- STM32 Ethernet Start Point 20180307Document17 paginiSTM32 Ethernet Start Point 20180307marcor08100% (1)
- Fundamentals in Digital IC DesignDocument16 paginiFundamentals in Digital IC DesignSiddharth PanditÎncă nu există evaluări
- Datasheet - Microcontrolador LPC3130-31 User Manual - UM10314Document558 paginiDatasheet - Microcontrolador LPC3130-31 User Manual - UM10314alexandre.oneill2479Încă nu există evaluări
- My CXL PresentationDocument25 paginiMy CXL PresentationHbk Mohan100% (1)
- BTP Project ReportDocument13 paginiBTP Project ReportVandhana RathodÎncă nu există evaluări
- Question Bank UnitwiseDocument6 paginiQuestion Bank UnitwiseKunal KhandelwalÎncă nu există evaluări
- Parallel DBMS VendorsDocument14 paginiParallel DBMS VendorsJeevanantham GovindarajÎncă nu există evaluări
- Pentium Memory Hierarchy (By Indranil Nandy, IIT KGP)Document6 paginiPentium Memory Hierarchy (By Indranil Nandy, IIT KGP)Indranil Nandy100% (5)
- ARM Introduction-1Document26 paginiARM Introduction-1040-NishanthÎncă nu există evaluări
- 8bit Microprocessor Using VHDLDocument16 pagini8bit Microprocessor Using VHDLTanu Newar0% (2)
- Microprocessor Core 2 DuoDocument22 paginiMicroprocessor Core 2 DuoGowtham Kodavati100% (1)
- Linuxkernnet PDFDocument178 paginiLinuxkernnet PDFizal005Încă nu există evaluări
- 21CS43 - Module 1Document21 pagini21CS43 - Module 1EMMANUEL RAJARATHNAMÎncă nu există evaluări
- CH12Document6 paginiCH12sara_lolo100% (1)
- Hindi Jokes - Welcome To Joke BookDocument3 paginiHindi Jokes - Welcome To Joke BookAnjuRoseÎncă nu există evaluări
- Evolution of MicroprocessorDocument28 paginiEvolution of MicroprocessorAbhinavÎncă nu există evaluări
- SCSI WikiDocument137 paginiSCSI WikijalvarÎncă nu există evaluări
- Unit 1: Fundamentals of Programmable DSPS: Bhooshan HumaneDocument60 paginiUnit 1: Fundamentals of Programmable DSPS: Bhooshan HumaneFirozÎncă nu există evaluări
- Z8 Assembly Language Programming Manual Dec80Document176 paginiZ8 Assembly Language Programming Manual Dec80Colin JewisonÎncă nu există evaluări
- VLSI Lecture02 OpenIDEA (정무경)Document69 paginiVLSI Lecture02 OpenIDEA (정무경)Vinit PatelÎncă nu există evaluări
- Microprocessor 80486Document6 paginiMicroprocessor 80486Gaurav BisaniÎncă nu există evaluări
- Linux Device Drivers Workshop Training For ProfessionalsDocument5 paginiLinux Device Drivers Workshop Training For ProfessionalsNguyenVan Thanh100% (1)
- Questa Sim MulticoreDocument92 paginiQuesta Sim MulticoretungnguyenÎncă nu există evaluări
- Nexus Configuration For ACSDocument6 paginiNexus Configuration For ACSVirender Kumar100% (1)
- Gpu1 - GPU IntroductionDocument20 paginiGpu1 - GPU IntroductionRichik DuttaÎncă nu există evaluări
- 3 Stage and 5 Stage ARMDocument4 pagini3 Stage and 5 Stage ARMRaj HakaniÎncă nu există evaluări
- Integration of Spin-RAM Technology in FPGA Circuits - 2Document22 paginiIntegration of Spin-RAM Technology in FPGA Circuits - 2ShivamÎncă nu există evaluări
- Intel Microprocessor History: Ramzi Shihadeh AlqrainyDocument48 paginiIntel Microprocessor History: Ramzi Shihadeh AlqrainyRamzi Alqrainy100% (2)
- Microprocessor 80386Document17 paginiMicroprocessor 80386gujusÎncă nu există evaluări
- Dual Core Vs Core 2 DuoDocument5 paginiDual Core Vs Core 2 DuogermainjulesÎncă nu există evaluări
- Arm7 LPC2148 1Document48 paginiArm7 LPC2148 1Roberta Fisher100% (2)
- PCI Express Architecture PHY Test Specification, Revision 5.0, Version 1.0Document119 paginiPCI Express Architecture PHY Test Specification, Revision 5.0, Version 1.0suniljasthi100% (1)
- Arm LPC2148 MaterialDocument17 paginiArm LPC2148 Material1000kvÎncă nu există evaluări
- LPC 2378 Development BoardDocument160 paginiLPC 2378 Development BoardDinesh KumarÎncă nu există evaluări
- Designing of External Loader On QSPIDocument35 paginiDesigning of External Loader On QSPIealanlÎncă nu există evaluări
- Post Si Validation.Document63 paginiPost Si Validation.guru87.joshi3473Încă nu există evaluări
- Assessment of Cache Coherence ProtocolsDocument195 paginiAssessment of Cache Coherence Protocolscharity_iitm100% (1)
- Asic DDR PhyDocument1 paginăAsic DDR PhylmlululuÎncă nu există evaluări
- Zedboard UbuntuDocument11 paginiZedboard Ubuntuebuddy1705Încă nu există evaluări
- NXP LPC1768 & Keil Quadcopter Project Lab Manual PDFDocument99 paginiNXP LPC1768 & Keil Quadcopter Project Lab Manual PDFakozyÎncă nu există evaluări
- Evaluation of Microprocessor PDFDocument2 paginiEvaluation of Microprocessor PDFJennifer100% (1)
- 2014 Usa PDF BRKARC-2001Document105 pagini2014 Usa PDF BRKARC-2001Nishad DadhaniyaÎncă nu există evaluări
- Embd Course Pamplet - 3 - 4monthsDocument2 paginiEmbd Course Pamplet - 3 - 4monthsThanigai Arasu RuthirakottiÎncă nu există evaluări
- HID TutorialDocument52 paginiHID TutorialBenny ManurungÎncă nu există evaluări
- SCSI IntDocument17 paginiSCSI IntBreazu Cornel-MarcelÎncă nu există evaluări
- Ignitebook SampleDocument128 paginiIgnitebook Samplenilesh86378100% (1)
- Lecture 0: Cpus and Gpus: Prof. Mike GilesDocument36 paginiLecture 0: Cpus and Gpus: Prof. Mike GilesAashishÎncă nu există evaluări
- Unit 1Document124 paginiUnit 1RaviÎncă nu există evaluări
- LPC2148 RTC ProgrammingDocument10 paginiLPC2148 RTC ProgrammingRavi Rajan100% (1)
- Microcontroller 8051Document31 paginiMicrocontroller 8051Munazza FatmaÎncă nu există evaluări
- TCP & 3 Way Handshake in DetailDocument13 paginiTCP & 3 Way Handshake in DetailshrikantchaturÎncă nu există evaluări
- MCB2300 CanDocument14 paginiMCB2300 CanMichaelÎncă nu există evaluări
- Linux Kernel DriverDocument32 paginiLinux Kernel Driverscuser.pokeÎncă nu există evaluări
- Contemporary Device Tree PDFDocument25 paginiContemporary Device Tree PDFgiribabu reddyÎncă nu există evaluări
- Rabbit - Overview of The Rabbit 4000 Product Line & Dynamic C SoftwareDocument23 paginiRabbit - Overview of The Rabbit 4000 Product Line & Dynamic C SoftwareAmr ElmestekawiÎncă nu există evaluări
- Mipi I3C Basic Specification v1 1 1Document446 paginiMipi I3C Basic Specification v1 1 1m3y54mÎncă nu există evaluări
- NXP Level-Shifting andDocument4 paginiNXP Level-Shifting andm3y54mÎncă nu există evaluări
- Mastik: A Micro-Architectural Side-Channel Toolkit: The University of Adelaide and Data61, CSIRO Adelaide, AustraliaDocument6 paginiMastik: A Micro-Architectural Side-Channel Toolkit: The University of Adelaide and Data61, CSIRO Adelaide, Australiam3y54mÎncă nu există evaluări
- TCP/IP Attack LabDocument8 paginiTCP/IP Attack Labm3y54mÎncă nu există evaluări
- Buffer Overflow Vulnerability LabDocument12 paginiBuffer Overflow Vulnerability Labm3y54mÎncă nu există evaluări
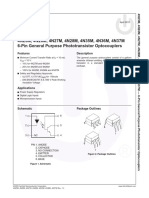
- 4N25M, 4N26M, 4N27M, 4N28M, 4N35M, 4N36M, 4N37M 6-Pin General Purpose Phototransistor OptocouplersDocument13 pagini4N25M, 4N26M, 4N27M, 4N28M, 4N35M, 4N36M, 4N37M 6-Pin General Purpose Phototransistor Optocouplersm3y54mÎncă nu există evaluări
- 5001 PDFDocument1 pagină5001 PDFm3y54mÎncă nu există evaluări
- Ubuntu16 04 VM ManualDocument6 paginiUbuntu16 04 VM Manualm3y54mÎncă nu există evaluări
- Overview and Characteristics of Fan: Technical MaterialDocument10 paginiOverview and Characteristics of Fan: Technical Materialm3y54mÎncă nu există evaluări
- Using CodeWarrior TAP With PDFDocument5 paginiUsing CodeWarrior TAP With PDFm3y54mÎncă nu există evaluări
- Series 218: Data Sheet Data SheetDocument2 paginiSeries 218: Data Sheet Data Sheetm3y54mÎncă nu există evaluări
- Nano Slo-Blo Fuse 449 SeriesDocument3 paginiNano Slo-Blo Fuse 449 Seriesm3y54mÎncă nu există evaluări
- PCB Material DE104 Laminate and Prepreg Datasheet - iMX6 Rex DBBDocument2 paginiPCB Material DE104 Laminate and Prepreg Datasheet - iMX6 Rex DBBm3y54mÎncă nu există evaluări
- Mixed Signal Oscilloscope HMO3002 (HMO3004)Document3 paginiMixed Signal Oscilloscope HMO3002 (HMO3004)m3y54mÎncă nu există evaluări
- ADP1706 ADP1707 ADP1708: 1 A, Low Dropout, CMOS Linear RegulatorDocument20 paginiADP1706 ADP1707 ADP1708: 1 A, Low Dropout, CMOS Linear Regulatorm3y54mÎncă nu există evaluări
- jszf36c512 - 1gx72pz DDR3 SDRAM RDIMM PDFDocument23 paginijszf36c512 - 1gx72pz DDR3 SDRAM RDIMM PDFm3y54mÎncă nu există evaluări
- Configuring DDR in U-Boot Using QCVSDocument8 paginiConfiguring DDR in U-Boot Using QCVSm3y54mÎncă nu există evaluări
- Features and Applications of The P82B715 I2C-bus ExtenderDocument29 paginiFeatures and Applications of The P82B715 I2C-bus Extenderm3y54mÎncă nu există evaluări
- IDTQS3VH16233 Bus Switch PDFDocument8 paginiIDTQS3VH16233 Bus Switch PDFm3y54mÎncă nu există evaluări
- Porting U-Boot and Linux To T4240Document11 paginiPorting U-Boot and Linux To T4240m3y54mÎncă nu există evaluări
- 8ge Port Switch With Integrated Ge Copper PhyDocument2 pagini8ge Port Switch With Integrated Ge Copper Phym3y54mÎncă nu există evaluări
- PSReCSDK110eUserGuide PDFDocument143 paginiPSReCSDK110eUserGuide PDFr1c4rdo1988Încă nu există evaluări
- Performance Price Capabilities Size: A Full Spectrum of Spectrum Analyzer SolutionsDocument2 paginiPerformance Price Capabilities Size: A Full Spectrum of Spectrum Analyzer SolutionsVictorÎncă nu există evaluări
- CH341A Mini Programmer Schematic and Drivers One Transistor PDFDocument8 paginiCH341A Mini Programmer Schematic and Drivers One Transistor PDFjuanÎncă nu există evaluări
- Description: KEDB: ITIL ComplianceDocument12 paginiDescription: KEDB: ITIL ComplianceSalman SaluÎncă nu există evaluări
- Docu48343 NetWorker 8.1 and Service Packs Release NotesDocument212 paginiDocu48343 NetWorker 8.1 and Service Packs Release NotesKishorÎncă nu există evaluări
- A Location Based Advertisement Scheme Using OpenStreetMapDocument6 paginiA Location Based Advertisement Scheme Using OpenStreetMapbebisekitÎncă nu există evaluări
- DSPWin Terminal Software ManualDocument25 paginiDSPWin Terminal Software Manualmarkmellinger100% (1)
- SAS Institute A00-211 PDF Exam Questions and Answers From TestkingDocument10 paginiSAS Institute A00-211 PDF Exam Questions and Answers From TestkingAlok Yadav100% (2)
- Cello4 Manual (UM583000-4) (12.6)Document45 paginiCello4 Manual (UM583000-4) (12.6)ec04017Încă nu există evaluări
- Yealink SIP Phones Release Notes of Version80Document34 paginiYealink SIP Phones Release Notes of Version80Muhammad SiddiuqiÎncă nu există evaluări
- Dell Laptop Service CenterDocument1 paginăDell Laptop Service CenterMaroof AhmedÎncă nu există evaluări
- Forcepoint NGFW Mobile VPN ConfigDocument18 paginiForcepoint NGFW Mobile VPN ConfigGeorge JR BagsaoÎncă nu există evaluări
- Computer Knowledge Section TestDocument2 paginiComputer Knowledge Section Testatingoyal1Încă nu există evaluări
- Frenetic Programmers Guide PDFDocument150 paginiFrenetic Programmers Guide PDFPanagiotis FamelisÎncă nu există evaluări
- DB2 BrochureDocument4 paginiDB2 BrochureKeith ChanÎncă nu există evaluări
- Comandos Lotus Domino 7Document31 paginiComandos Lotus Domino 7Alberto KremaÎncă nu există evaluări
- HR OverviewDocument23 paginiHR Overviewsarang warudkarÎncă nu există evaluări
- How To Replace XFabric Link Cable OnlineDocument4 paginiHow To Replace XFabric Link Cable OnlineSamirChikhiÎncă nu există evaluări
- BI Apps11g Perf Tech Note V1 PDFDocument32 paginiBI Apps11g Perf Tech Note V1 PDFNicholas JohnÎncă nu există evaluări
- Ursalink UR51 Industrial Cellular Router User GuideDocument129 paginiUrsalink UR51 Industrial Cellular Router User GuideUrsalink MarketingÎncă nu există evaluări
- 1448504978725ADSL Modem - Igate AW300N PDFDocument9 pagini1448504978725ADSL Modem - Igate AW300N PDFĐỗ DuyÎncă nu există evaluări
- Ite Unit 1Document39 paginiIte Unit 1karthickamsecÎncă nu există evaluări
- Acer Price List 10-April-2013Document7 paginiAcer Price List 10-April-2013alexcus1539Încă nu există evaluări
- Alternative Online Platform For Blended LearningDocument7 paginiAlternative Online Platform For Blended LearningRomeo BalingaoÎncă nu există evaluări
- Robosapien Hacking2Document3 paginiRobosapien Hacking2GEORGE KARYDISÎncă nu există evaluări
- Product Manual 26451V1 (Revision B) : 505CC-2 Steam Turbine and Compressor ControlDocument82 paginiProduct Manual 26451V1 (Revision B) : 505CC-2 Steam Turbine and Compressor ControlrodrurenÎncă nu există evaluări
- SoftX3000 Operation Manual-Configuration ExamplesDocument553 paginiSoftX3000 Operation Manual-Configuration Examplesricardomoreirascribd100% (2)
- Computer Organization: Instruction Set ArchitectureDocument148 paginiComputer Organization: Instruction Set ArchitecturekaneeshaÎncă nu există evaluări
- Chapter 13Document56 paginiChapter 13mansoor.ahmed100Încă nu există evaluări
- Integration of New Sensor Data in Open Data CubeDocument3 paginiIntegration of New Sensor Data in Open Data CubeAnonymous izrFWiQÎncă nu există evaluări